
基于移动智能端增强现实技术的船舶辅机虚拟实验系统研究
2019-10-25 02:23:44柳化松王忠俊
中国修船 2019年5期
柳化松,孙 俊,王忠俊
(武汉理工大学 能源与动力工程学院 ,湖北 武汉 430063)
船舶辅机装置复杂多样,设备体积庞大,在真实的实验培训中,实验室空间有限,不可能对所有的设备都细致讲解,从而导致学生很难掌握船舶辅机设备原理知识与拆装过程。增强现实技术(简称AR)是在虚拟现实技术(简称VR)的基础上发展起来的,用户在看到真实世界的同时也能看到和真实世界相融合的虚拟物体。AR系统不论是在视觉上,还是在交互上都能实现真实与虚拟的无缝实时结合,实现真正的虚实融合[1]。移动智能设备既具备电脑迅速的计算能力,也具备强大的图像显示能力,市场价格也被多数人所接受,这些都促使移动智能终端成为增强现实的理想平台[2]。本文主要依托VR和AR,开发一套能够在移动智能端实现虚实结合和人机交互性能的用于船舶设备虚拟实验系统。
1 船舶辅机虚拟实验系统分析与设计
1.1 系统需求分析
AR是在VR的基础上衍生出来的,不仅集合了VR的沉浸感、交互感等特点,更是摆脱了VR的限制,建立了一种虚实融合的世界,带给用户不一样的新鲜感[3]。AR应用在工业生产上,可以使用交互的方式将虚拟的产品与人们联系起来,大大丰富了产品信息的传递方法。将AR应用在船舶设备虚拟实验中,不仅可以模拟真实的环境,还可以对模型进行虚拟实验操作。
本系统首先要保证系统功能的完整性,在完成船舶辅机设备虚拟三维模型与真实场景相融合的同时,还要保证三维虚拟模型物理动作自然连贯。另外要保证系统程序的可靠性与兼容性,使系统程序能稳定运行在现有移动智能设备上。
1.2 系统功能
基于移动智能端的AR船舶辅机实验系统在使用过程中,不需要电脑设备,只需将系统安装在移动智能端(手机和平板)上便能实现系统的所有操作[4]。进入增强现实平台系统之后选择相应的辅机设备,可以在模式选择中选择不同的模式进行学习训练。AR系统功能框图如图1所示。

图1 AR系统功能框图
该系统主要包含2种模式。①教学模式。利用建模仿真等方法,可在相应的功能中查看设备的原理介绍,拆装动画等内容。②学习模式。系统会模拟出真实的拆装环境,按照选择的辅机设备生成与之相对应的虚拟模型。可在此环境中进行拆装练习,系统还会根据拆装效果给出相对应的评价。
1.3 开发流程
基于移动智能端AR船舶辅机实验系统的核心内容是建立可智能交互的船舶辅机实验增强现实平台。用户在该平台与实验系统进行相关交互操作,系统将数据库模型资料和一些多媒体信息资料加载到增强现实平台上[5]。然后用户可以在移动智能设备上进行相关交互操作。选择具有强大跨平台能力和便捷开发方式的Unity3D开发引擎为增强现实系统的3D开发引擎,脚本开发语言为C语言,三维建模工具选择性价比高并且易上手的3dmax。系统的开发流程示意图如图2所示。
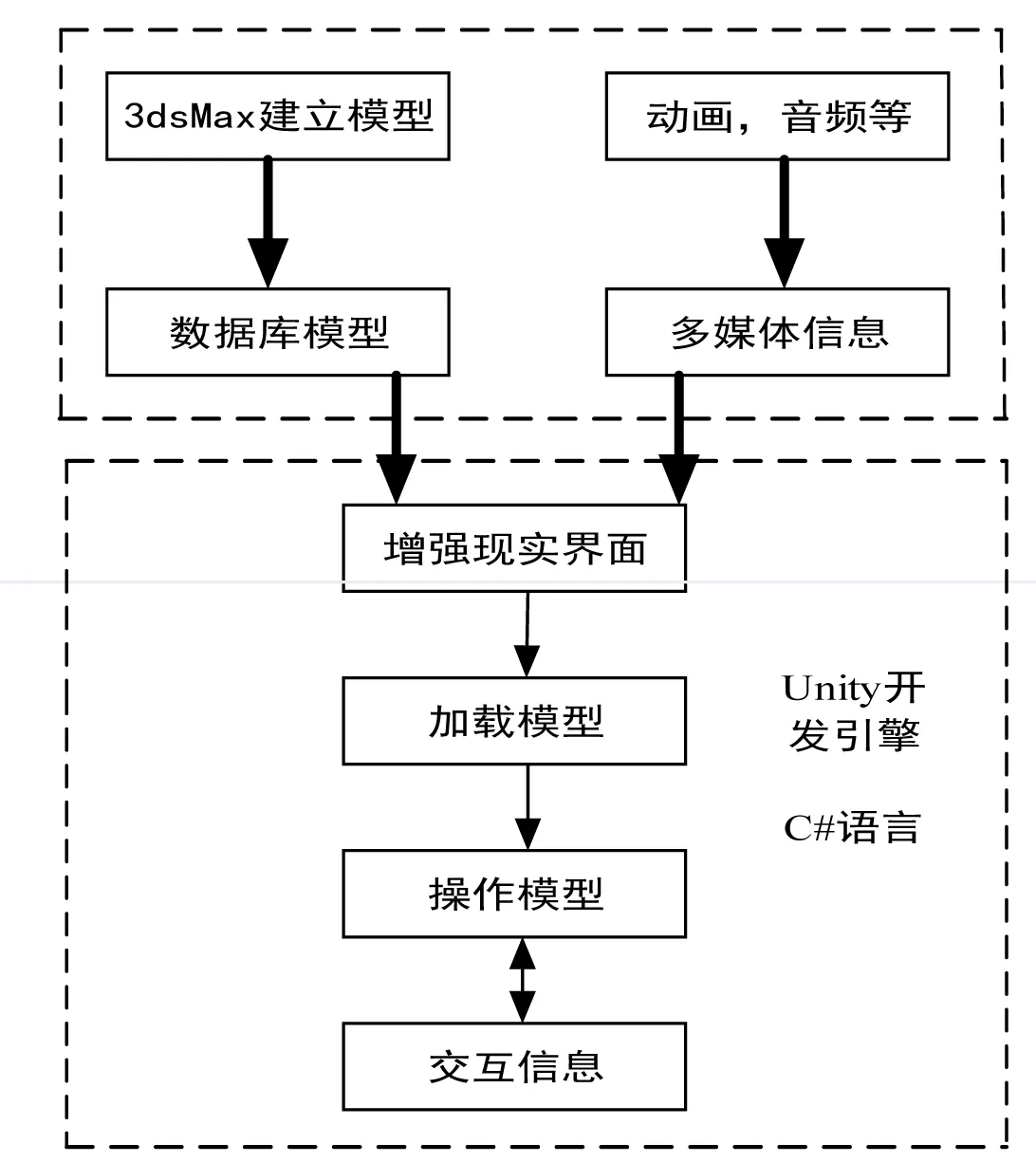
图2 开发流程示意图
2 关键技术
2.1 模型优化
制作高质量的三维模型,需要1∶ 1精准建模。但是对于船舶辅机这类结构复杂的设备,精准建模会使模型文件变大。对模型进行移动旋转等交互操作,要求三维模型不仅要真实,还要尽可能减少复杂度。因此,需要采取正确的建模方式和与之相对应的模型优化方法,从而实现模型加载的实时性以及提高系统的运行速度。
影响虚拟实验系统最终运行的3大因素为:模型的总个数、模型的总面数、模型的总贴图量。本文主要对如下2方面进行研究。
1)对模型总个数进行优化。由于船舶辅机设备结构复杂,在进行初始建模时,一方面,要按照真实的船舶辅机设备结构设置合理的父子层级关系,用不同的名字代表不同含义,避免模型结构混乱,减少后期的工作量;另一方面,由于对模型的操作只是对整体操作,所以可以对模型进行合并使之成为整体,这就需要对模型的个数进行精简。主要使用合并命令和塌陷命令。
2)对模型面数进行优化。由于模型零件的整体操作,并不需要对零件模型的内部结构详细说明。所以在进行模型搭建的过程中,可以对模型的面数进行精简。主要有面片模型面的精简、圆柱模型面的精简、删除模型之间的重贴面等方法。
2.2 虚实结合
增强现实系统的开发核心是实现虚实结合,而三维注册技术是实现虚实结合最为关键的技术。虚实结合主要是让虚拟物体与真实场景无缝结合,所涉及的技术内容如图3所示。

图3 虚实结合技术内容
在回放定位技术中,三维注册技术决定了虚拟物体的回放准确度。通过对摄像机姿态进行实时跟踪以定位虚拟图形位于真实场景中的注册位置。通常有基于跟踪器的注册技术、基于视觉的注册技术。基于跟踪器的注册技术一般采用专门的传感器(如GPS、陀螺仪、加速器等)来进行,主要来记录真实世界中观察者的位置和方向,以保持虚拟空间和真实空间相对位置关系的连续性,从而实现精准的注册。基于视觉的注册技术由摄像机获得真实场景的图像,再利用计算机图形算法从中提取跟踪信息,从而判定摄像机的位置[6]。
在增强现实系统结构中,摄像机获取周围真实环境的信息,跟踪注册系统则用于跟踪观察用户的头部方位和视线方向,虚拟场景生成要加入的虚拟图形对象,虚实结合系统将虚拟场景和真实场景定位配准[7]。虚实结合过程示意图如图4所示。
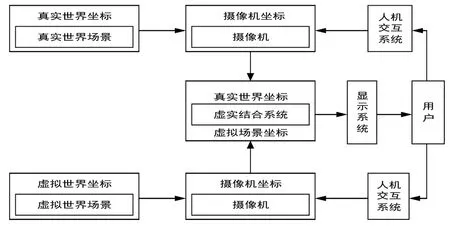
图4 虚实结合过程示意图
在增强现实系统中三维注册系统所要完成的主要任务是将创建的虚拟信息添加到世界坐标中的映射位置,经过变换后在显示模块中显示输出[8]。虚拟信息(也叫增强信息)是AR系统呈献给使用操作者的重要信息,利用这些信息可以帮助使用者顺利完成系统操作。在本系统中虚拟信息的表现形式主要有:虚拟3D模型信息、文本信息、图片信息等。系统中的虚拟3D模型信息主要为辅机各种设备的三维模型,文本信息主要包括设备的文字介绍、系统操作的智能文字提示信息等,智能提示功能也是系统的重要内容之一。
2.3 触屏交互
在AR应用过程中,人们通常要实现自然和谐的交互操作。考虑到适用性与方便性,本系统专门定义了一种基于触屏交互的手势动作。在系统开发过程中,Unity中通常用 “(x,y,z)”的格式来描述物体的场景坐标信息。Transform组件用来描述物体在空间中所处的状态,主要包括物体的位置、旋转和缩放。在系统设计过程中可以在Unity中通过给物体模型添加C语言脚本,依据Transform组件中位置的变化和接触屏幕触点的个数从而实现模型物体的移动、旋转、缩放等多种交互功能[9]。基于这种判断方法,系统自定义一种针对虚拟实验的操作手势。具体各种手势动作定义如表1。

表1 自定义触屏手势
在进行触屏交互操作时,系统会依据用户给出的手势信息自动识别在触屏上交互操作时接触点的个数以及交互手势的方向,从而调用系统程序中相对应的运动函数,实现对模型的交互操作。Leng1代表原始2个触点之间的原始坐标点距离,Leng2代表2个触点变化后的坐标点距离,具体的交互工作流程图如图5所示。
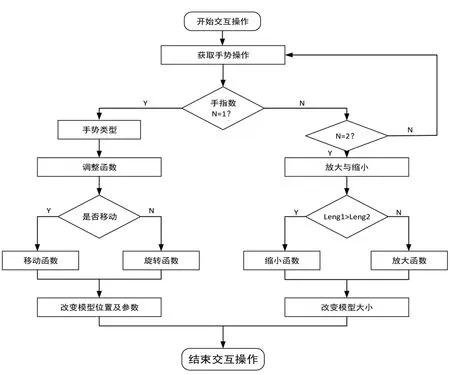
图5 交互工作流程
3 案例研究
以系统中的船舶辅机设备水位计为例,展示在教学模式下对船舶水位计的相关操作。操作界面示意图如图6所示。本系统涵盖智能提示功能,考虑到对模型以及对船舶设备模型的拆装不熟悉,在模型拆装的关键步骤上会给予提示,以便提高学习效率。以辅机设备水位计来说,为了更好的实现智能提示的效果,在完成水位计每一个拆解步骤后,都会弹出一个提示框,给出下一步的拆装提示,以便学生能更加快速的完成拆装工作,拆装提示示意图如图7所示。

图6 操作界面示意图
4 结束语
本文将AR与现代船舶辅机实验相结合,开发一款基于AR船舶辅机设备实验系统,该系统解决了船舶辅机模型设备优化、用户与模型交互、智能提示等问题。在本系统中可以实现多模型的切换,并且不需要任何的输入设备,用相应的手势动作便能实现想要的功能。该系统不仅能在船舶教学上节省成本、提高效率,并在其他机械拆装与维护方面有着很大的发展前景。
猜你喜欢
船舶(2021年4期)2021-09-07 17:32:22
电站辅机(2021年4期)2021-03-29 01:17:00
广州文博(2020年0期)2020-06-09 05:15:44
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
中国船检(2017年3期)2017-05-18 11:33:09
西藏科技(2016年5期)2016-09-26 12:16:43
兽医导刊(2016年6期)2016-05-17 03:50:15
中国民族医药杂志(2016年2期)2016-05-14 07:12:00
中国民族医药杂志(2016年4期)2016-05-09 07:41:15
