
基于单片机的主机测速系统设计
2019-10-25 02:29:12韩宇亮鞠冀军王家宏张浩然
中国修船 2019年5期
韩宇亮,陈 甜,鞠冀军,王家宏,张浩然,沈 威
(1.浙江海洋大学 港航与交通运输工程学院,浙江 舟山 316000;2.浙江国际海运职业技术学院,浙江 舟山 316000)
船舶主机的转速是监测船舶航行过程稳定性的一个重要运行指标,它实时反映了船舶主机的外界负荷变化[1]。因此,工作人员应密切关注主机转速的变化,确保及时了解航行速度,保障人员的安全。随着造船工业向着高速化、自动化方向发展,在数字化系统中通过单片机测量柴油机转速,可使船舶更加高效运转,防止因柴油机转速异常带来安全隐患。同时,传统主机测速环节采用带相敏元件的交流测速电机,从成本、精度以及可靠性的角度考虑,都急需改进。
1 传统异步发电机测速

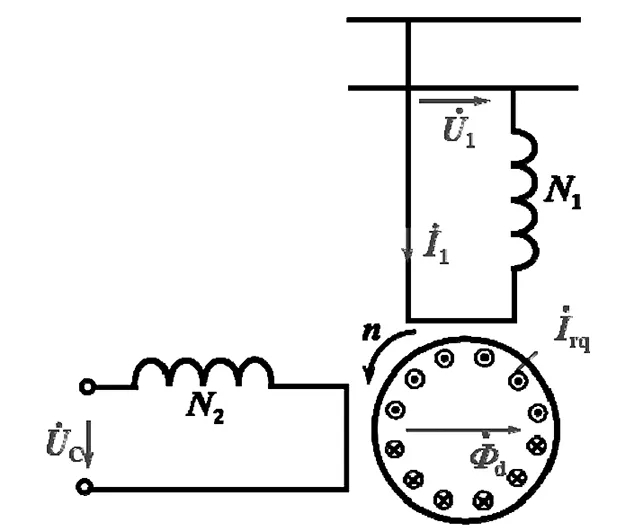
图1 异步电机测速原理示意图
用于船舶转速指示仪的异步测速发电机转子通过联轴器、齿轮与主机凸轮轴联结。在实际应用中,可以将多个转速指示仪并联到输出电压侧,分别传输到驾驶室、集控室和主机机舱。但由于直轴方向的感生磁场为交变磁场,实际的异步测速发电机的输出电压与转速之间并不是严格的线性关系[2]。此外考虑到励磁电源、温度、漏磁通和负载影响,此类型的测速原件无法达到高精度,而且这种方式测得的误差越小,成本越高,对维护的要求也会越高。因此,需要设计一种简单、精确、成本较低的测速系统。
2 基于单片机的数字测速系统
基于单片机的主机测速系统硬件设计原理是将船舶主机的盘车机齿轮固定在轴上作为待测物体,齿轮运转时产生的信号经磁脉冲传感器接收后,送入集成运算放大电路中,将正弦波信号放大,然后将放大后的信号接入到D型触发器中。D型触发器的双稳态触发特性,可以将正弦波转换为单片机能识别的矩形波。然后单片机通过脉冲捕捉,将待测物体产生的频率以一定比例进行转化,最后计算出相应的主机转速。转速数值会发送给驾驶台和集控台,同时在机旁数码显示模块中显示,数值中的正负对应转速的方向。磁脉冲传感器原理示意图如图2所示。
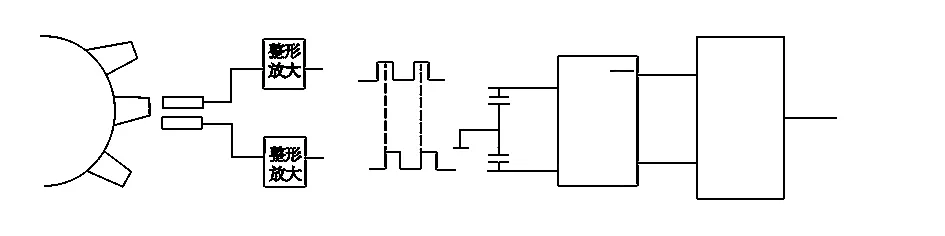
图2 磁脉冲传感器原理示意图
2.1 磁脉冲测速原理与组成
磁脉冲传感器磁头与盘车机齿轮顶之间保持一个较小的间隙。当主机的齿轮转动时,磁头将交替对准齿顶和齿槽,使所测得的电磁数值发生周期性的变化,最终传感器获得的信号将以脉冲的形式输出[3]。磁脉冲传感器产生脉冲信号的频率与主机的转速成比例,测速系统所得的信号频率用f表示,通过所选齿轮的齿数z与信号频率所得的频率f以及齿轮在单位时间内的转速n,可以得到n=60f/z,r/s。
实际上,磁脉冲传感器感应的脉冲是很难精准捕捉到的,直接获得的正弦信号较弱,这就需要对信号进行相关的变换处理[4]。将传感器的输出脉冲接入到放大电路的输入端,对接收后的信号做过滤变换,使其质量变得更好。过滤后的电压信号进行放大处理,然后借助D型触发器将正弦信号转变为嵌入式芯片能识别的方波,最后将其输出。
磁脉冲传感器内部有永磁铁、软磁芯、线圈,外部是由紧固螺母以及传感器安装架组成。齿轮在转动时,齿轮与磁铁的距离在不断产生变化,如果是齿顶正对磁铁,那么磁阻减小,磁场增强,产生高电平信号;如果是齿谷正对磁铁,那么磁阻增大,磁场减小,产生低电平信号。产生的高低电平信号就在不断交替,从而产生的脉冲信号也在不断变化,磁脉冲接口端有两根线,其中一根线与大地相连接,另一根则是接入放大电路的输入端。
2.2 软件系统设计
系统软件整体设计流程图见图3(R7为寄存器)。

图3 系统软件整体设计流程图
为了实现单片机的计数功能,首先需要一个最初定义值,将该最初值定义好后,单片机经由自身运算将得到的数值传送到数码管,数码管会根据编写的相应代码对得到数值进行显示。编程时要求主机在发生正反转向变化时,能够有对应的函数代码进行指令转换的接收,使其对转向变化进行正确判断后,还能将这一现象反映在数值变化上。当主机在进行正向运转时,调出正转指令对应的数码管数值代码,使正转这一动作可以正确的表现在数值变化上,显示器上显示的数值为正数;当主机在进行反向运转时,调出对应的反转指令执行的数值代码,使反转这一动作可以正确的表现在数值变化上,显示器上显示的数值为负数。最后,整个程序的进行需要调用延迟子程序。这样,在对程序进行修改之后,可以在仿真软件上运行,观察结果是否与预期一致。
3 仿真调试
Proteus 能够仿真单片机的 CPU 运行状况,更能仿真单片机的外围电路,即仿真没有单片机配合的另外电路的运行状况[5]。图4为系统的仿真电路示意图。
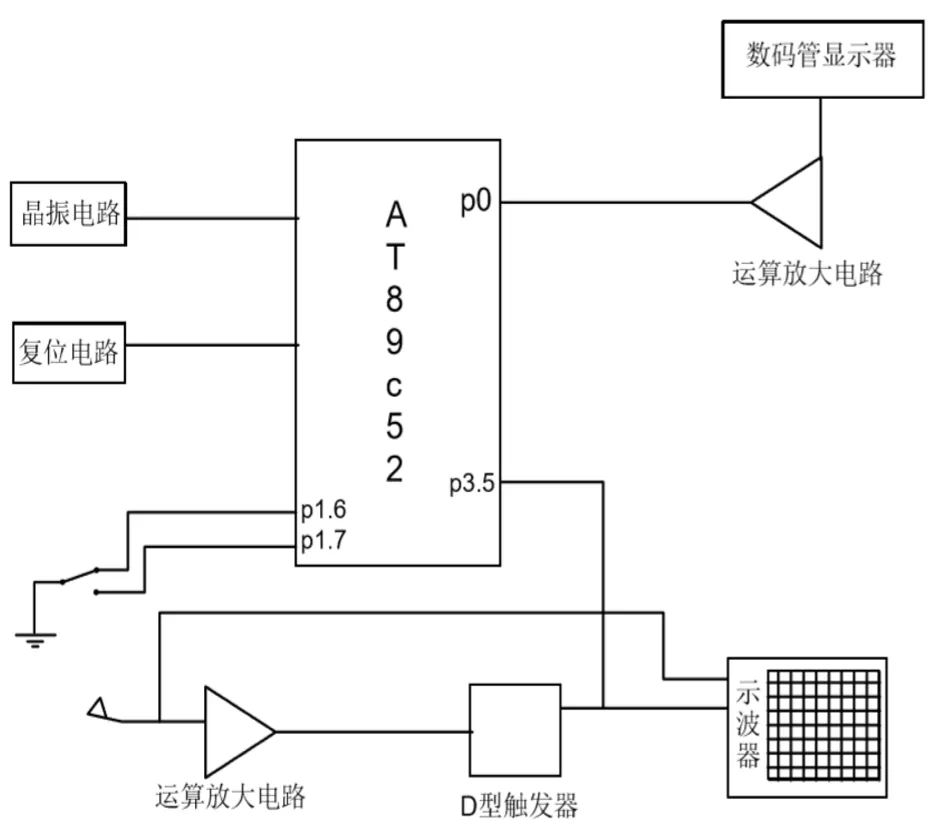
图4 仿真电路示意图
首先,系统将磁脉冲发生器发出的正弦信号经过信号处理转化为方形波,然后将处理后的方形波信号通过单片机的P3.5接口接入程序中,使其在该系统内部进行高速计算和运行指令,得出当前转速值。也可通过单刀双掷开关进行模拟主机工况,判断主机是正车运转还是倒车运转。如果主机是正车运转,则将单刀双掷开关打到单片机的P1.6端口,这样单片机在进行信号处理并运行完内部相应的程序之后,第一个数码管(P0端口连接的)上的显示屏不亮;如果此刻主机是倒车运转,单刀双掷开关是打到单片机的P1.7端口,这样单片机在进行指令后并进行对应的计算后,会在第一个数码管(P0端口连接的)上显示屏上显示符号“—”。为了保证得到的数值更具有可行性,同时避免偶然误差造成数值变化,需要在得到最后的结果时等1~2 s。
4 结果分析
针对实验过程以及结果进行分析,首先得知,对于待测物体进行周期运动时产生的信号都是正弦波。为了体现运算放大电路及D型触发器的作用,接入两路到示波器的输入端,一路正弦脉冲输入直接接到示波器显示正弦波的接口,另一路将正弦信号输出给放大电路之后,再经D型触发器接入到示波器显示矩形波的接口,可以在示波器上显示出2种对应的波形。
触发器是一个具有记忆功能的信息存储器件,其具有的2个稳定状态可以做波形发生触发器的2个状态,即“0”和“1”。当正弦信号达到上下电压阈值,触发器会从一个稳定状态翻转到另一个稳定状态。从仿真的结果看,可以非常明显地看出原先经过传感器得到的正弦信号波经过放大整形电路及D型触发器后得到了完整的矩形波。同时在示波器上对原始信号和转换后的矩形波进行对比分析,显示装置信号波形变换的功能运行正常,符合主机测速系统的要求。
5 结束语
单片机主机测速的方式不但极大的简化了系统,而且使控制精度和故障监测更为灵敏,文中介绍的主机转速检测系统,可以接入计算机控制系统,进行每秒百万次的数据输出,精确可靠且维护成本低。磁脉冲测速系统也有不足之处,例如机舱电磁环境复杂时,特别是将来中压电力系统(6.6 kV)的广泛应用,对传感器的输出将会有很大影响,有待进一步改进。
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
内燃机工程(2021年6期)2021-12-10 08:07:46
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
电子世界(2017年22期)2017-12-02 03:03:45
制造技术与机床(2017年3期)2017-06-23 08:11:52
网络安全和信息化(2017年4期)2017-03-08 19:09:03
电测与仪表(2015年16期)2015-04-12 00:44:26
