
无人机多光谱遥感反演冬小麦植株含水率
2019-10-25 07:02张宝忠彭致功韩娜娜
节水灌溉 2019年10期
魏 青,张宝忠,魏 征,彭致功,韩娜娜
(1.中国水利水电科学研究院流域水循环模拟与调控国家重点实验室,北京100038;2.国家节水灌溉北京工程技术研究中心,北京 100048)
0 引 言
植株含水率是反映作物水分状况的指标之一,也是开展作物水分亏缺诊断的重要基础,及时准确的获取植株含水率信息,对精准农业发展以及农业水资源高效利用具有重要意义[1,2]。传统估算植株含水率的方法主要是通过破坏性采样测定,操作繁琐、耗费大量人力物力,不足以满足实施快速监测的要求,因而研究较为简单且精度较高的植株含水率估算方法成为当前热点[3]。
目前国内外基于卫星遥感或者地面遥感对植株含水率的研究已经取得了一定进展。Carter等发现叶片水分含量对光谱特性的影响主要是由于对辐射的直接吸收所致,此外叶片内部结构也有一定影响[4]。王强等利用350~2500nm范围内所有光谱波段可能的两两组合,构建了比值指数和归一化指数,其对棉花冠层水分含量诊断精度较高[5]。张亚伟等利用单波长近红外光电传感器搭建了小麦植株含水率的检测系统,构建了基于最小二乘支持向量机建立的最优模型,为小麦植株含水率无损快速检测提供了一种有效的方法[6]。哈布热等研究表明,在350~750 nm的可见光区域成熟期冬小麦冠层光谱反射率随植株含水率的增大而降低,661nm以及771nm附近波段的水分监测光谱参数模型效果最佳[7]。以上研究虽然在一定程度上建立了测定植株含水率的方法,但存在时效性差的缺点,在农田尺度上的应用存在一定的局限性。
无人机遥感技术由于其平台具有移动性强、适用性好的优势,且获取影像分辨率高、作业周期短,在农业、水质监测和测绘等领域发挥着越来越重要的作用,为农情监测研究提供了新的解决方案。在国内外农用无人机遥感方面,HASSAN-ESFAHANI等利用无人机搭载高光谱相机获取光谱图像,基于人工神经网络算法精确估算了土壤表层含水率[8]。陈硕博等提出了低空无人机多光谱遥感大面积快速获取土壤水分的方法,并有效建立了评估抽穗期冬小麦土壤水分的最优模型[9]。裴浩杰等提取无人机高光谱影像反演的CGI均值,实现了精确判断小麦总体的长势状况[10]。陈俊英等开展了基于无人机多光谱遥感影像的光谱反射率与不同光合参数的反演模型,验证了大范围监测作物光合作用的可行性[11]。这些研究显示了无人机遥感技术在获取植被冠信息的潜力,但利用无人机多光谱遥感直接反演作物植株含水率的研究较少。
本文将利用无人机搭载多光谱相机获取冬小麦光谱反射率,构建植株含水率与光谱反射率以及光谱植被指数模型,并从中优选构建植株含水率估算模型,旨在获得一种简便准确地预测植株含水率的实时性区域监测方法。
1 材料与方法
1.1 研究区概况
本研究在中国水利水电科学研究院大兴试验基地(39°37.25′N,116°25.51′E)开展,海拔约30 m,属于温带半干旱大陆性季风气候,多年平均气温为12.1 ℃,多年平均降雨量为540 mm,集中在6和9月,降雨量占全年降雨量的80%以上。多年平均风速为1.2 m/s,冬春季风速较大,秋季次之,夏季风速最小。全年平均相对湿度为52%,全年日照时数为2 502 h,全年大于10 ℃的有效积温为4 730 ℃,日平均太阳净辐射为171 W/m2,光热条件丰富。全年无霜期平均为185 d,多年年均蒸发量为1 021 mm,土壤类型以砂壤土为主,适合小麦等多种粮食作物的生长。
1.2 试验布置
试验区小麦品种为中麦175,2017年10月13日播种,2018年6月6日成熟收获。试验设10个小区,3个重复,共30个小区。每个小区面积为58 m2,试验以水处理为主,灌溉水平为W0(0 mm)、W1(60 mm)、W2(120 mm)、W3(180 mm)、W4(240 mm)、W5(300 mm)。无人机试验在2018年5月5日(抽穗期)、5月24日(灌浆期)、6月3日(成熟期)进行。抽穗期、灌浆期和成熟期是关系冬小麦产量和品质的关键时期,植株含水率会表现出明显的差异性,在植株含水率模型构建中,避免作物水分模型生育期专一性的缺点,且植株含水率变化范围越大,模型越具有普适性,容错率也越高[7]。
1.3 数据获取方法
1.3.1 无人机系统及影像获取
本次实验借助的平台是采用开源飞控Pixhawk控制的经纬M600型六旋翼无人机系统(DJI,深圳市),搭载的遥感传感器为RedEdge(MicaSense,USA)。该相机焦距为5.5 mm,图像分辨率为1 280像素×960像素,相机设有5个光谱通道,中心波长分别为475 nm(蓝)、560 nm(绿)、668 nm(红)、840 nm(近红外)、717 nm(红边),相机同时配备了一块30 cm×30 cm的灰板和光强传感器。
无人机设至一定高度,镜头垂直向下,通过拍摄地面灰板来矫正反射率,然后按照预定航线飞至区域拍摄多光谱影像。每次拍摄时间为上午10∶00-12∶00,无人机飞行高度设为60 m,飞行时固定航线,航向和旁向重叠度均为80%,飞行速度为3 m/s,像元分辨率为4.09 cm。
1.3.2 植株含水率测定
小麦的植株含水率采用烘干法测定,先从各个小区摘取均20 cm宽区域的小麦植株,将植株分别装入保鲜袋中,称量并记录小麦植株的鲜重,然后放入在105 ℃条件下的烘箱杀青半小时,随后调至70 ℃干燥至恒重后记录植株的干重。本文采用湿基含水率公式计算冬小麦植株含水率,其计算公式如下:
(1)
式中:Cw为植株湿基含水率,%;Lw为植株鲜重,mg;Ld为植株干重,mg。
1.4 研究方法
1.4.1 基于光谱反射率的估算模型
将5个波段的影像最终合成一个tif格式的五波段影像,在反射率影像中利用掩膜方法先构建区域ROI,利用Bandmath工具分别计算5个波段的光谱反射率,将ROI区域范围内的小麦的平均光谱作为该小区的小麦光谱反射率,计算得到每一天30个小区的光谱反射率数据。
本文采用多元线性回归分析方法中的逐步回归法和强迫进入法揭示因变量(植株含水率y)与5个自变量[Rnir(x1),Rred(x2),Rgreen(x3),Rblue(x4),Rrededge(x5)]之间的线性模型。采用强迫进入法将5个波段的平均反射率作为自变量建立植株含水率的反演模型,采用逐步回归法根据自变量与因变量的相关性的高低,依次将自变量逐个选入回归模型中,若新选入的自变量的回归系数未达到显著水平,该自变量排除在回归模型之外。
1.4.2 基于光谱植被指数的估算模型
常用的植被指数中,NDVI可以表征出植株含水量的变化高低和植被叶面积指数等;SAVI被认为是建立简单“植株”的关键联系,可以消除土壤背景的影响;EVI中的土壤调整因子对地形条件比NDVI更敏感,起到很大的监测植被变化的作用;SR是绿色植物的灵敏指示参数,有效增强植被信息,减少非植被信息;NGRDI对广泛范围内的叶面积指数的反应程度更加敏感;VARI对大气和土壤影响的研究更加充分[12-17]。采用ENVI软件平台裁剪冬小麦30个小区反射率影像,提取6种植被指数,其计算公式见表1。
表1 植被指数计算公式
Tab.1 Vegetation indices

植被指数计算公式文献来源归一化植被指数NDVINDVI=Rnir-RredRnir+Rred[12]土壤调节植被指数SAVISAVI=1.5Rnir-RredRnir+Rred+0.5[13]增强型植被指数EVIEVI=2.5Rnir-RredRnir+6Rred-7.5Rblue+1[14]比值植被指数SRSR=RnirRred[15]归一化绿红差异指数NGRDINGRDI=Rgreen-RredRgreen+Rred[16]抗大气指数VARIVARI=Rgreen-RredRgreen+Rred-Rblue[17]
注:Rblue、Rgreen、Rred、Rnir分别为灰板对RedEdge相机蓝、绿、红、近红外波段的平均反射率。
本文采用植被指数建立植被含水率的估算模型。将植株含水率与6种植被指数分别建立一元线性关系,且采用多元线性回归分析方法中的逐步回归法和强迫进入法建立因变量(植株含水率y)与6个自变量(NDVI,SAVI,EVI,SR,NGRDI,VARI)之间的线性模型。
1.5 模型评价
本文选取20个小区的采集数据进行回归建模,其余10个小区的数据用来验证模型的精度,采用决定系数R2、均方根误差RMSE和相对误差RE作为评判模型精度的指标。R2越接近于1,RMSE越小,RE越小,说明该模型精度越好,模型反演植株含水率的效果更好[18]。
(2)
(3)
(4)

2 结果与分析
2.1 植株含水率变化趋势
水分胁迫、营养状况等外界条件以及自身长势都会造成同一种植物的植株特征有所差异,从而造成了光谱反射特性也不尽相同。图1为冬小麦不同生育期不同水分处理下植株含水率,通过单因素方差分析方法中的LSD法对无人机飞行观测的植株含水率比较,抽穗期的植株含水率与灌浆期的植株含水率的平均值相差13.2%,与成熟期的植株含水率的平均值相差31.2%,灌浆期的植株含水率与成熟期的植株含水率的平均值相差18%,这些差异在0.05的显著性水平下是显著的。

图1 冬小麦不同生育期不同水分处理下植株含水率Fig.1 Plant moisture content of winter wheat under different water treatments at different growth stages
2.2 模型构建
2.2.1 基于光谱反射率的多元回归模型
将各个波段平均光谱反射率与植株含水率进行相关性分析,由单个波段平均光谱反射率建立的模型决定系数较低,仅近红外波段决定系数为0.602,模型精度较低不能精准预测植株含水率,故采用多元线性回归分析建立模型。
表2为光谱反射率模型,9种模型的决定系数R2均大于0.65,表明基于多光谱遥感信息反演植株含水率的可行性。模型2和模型7决定系数R2较大、均方根误差RMSE和相对误差RE均较小,相较其他模型占优,但模型7比模型2更加简单便捷,故选择模型7作为光谱反射率优选模型。
2.2.2 基于光谱植被指数的回归模型
表3为光谱植被指数模型,由单个植被指数建立的6个植株含水率模型,决定系数R2较小、均方根误差RMSE和相对误差RE较大,模型拟合精度低不能实现精准预测。故采用多元线性回归分析研究由6个光谱植被指数组合构建的植株含水率模型,由于SAVI、NDVI与EVI,NGRDI与VARI之间存在共线性问题,在逐步回归法建模过程中为避免共线性问题对线性回归分析精度的影响依次选入了EVI、SR和VARI等变量进行建模。模型17和模型18的决定系数均大于0.75、均方根误差RMSE小于7.00%、相对误差RE小于10.00%,两者均可作为优选模型,但模型17在回归分析的过程中考虑了各变量间的共线性,相比模型18更适合作为优选模型。
表2 光谱反射率模型
Tab.2 Spectral reflectance model

模型编号植株含水率-光谱反射率回归模型R2FRMSE/%RE/%1y=1.199x1-6.705x2+3.154x3+8.530x4-1.325x5+0.3190.75833.8787.1510.122y=-10.871x21+8.412x1-80.235x22+4.336x2+33.194x23-1.847x3+178.536x24-5.963x4+13.287x25-4.714x5-0.5270.81421.4816.278.873y=0.501lnx1-0.153lnx2+0.191lnx3-0.054lnx4-0.194lnx5+1.0800.72127.9627.6811.264y=1.860x1-1.567x2+0.1460.66611.2228.4012.415y=1.633x1-4.342x2+4.264x3+0.1250.73213.6347.5410.906y=-17.572x21+13.281x1-1.679x2-1.6550.73414.3607.5010.937y=-15.188x21+11.201x1-5.552x2+9.161x21-1.1540.7739.4866.929.678y=0.591lnx1-0.082lnx2+1.0890.67910.0918.2412.229y=0.532lnx1-0.189lnx2+0.182lnx3+1.2660.7126.5167.8011.51
表3 光谱植被指数模型
Tab.3 Spectral vegetation index model
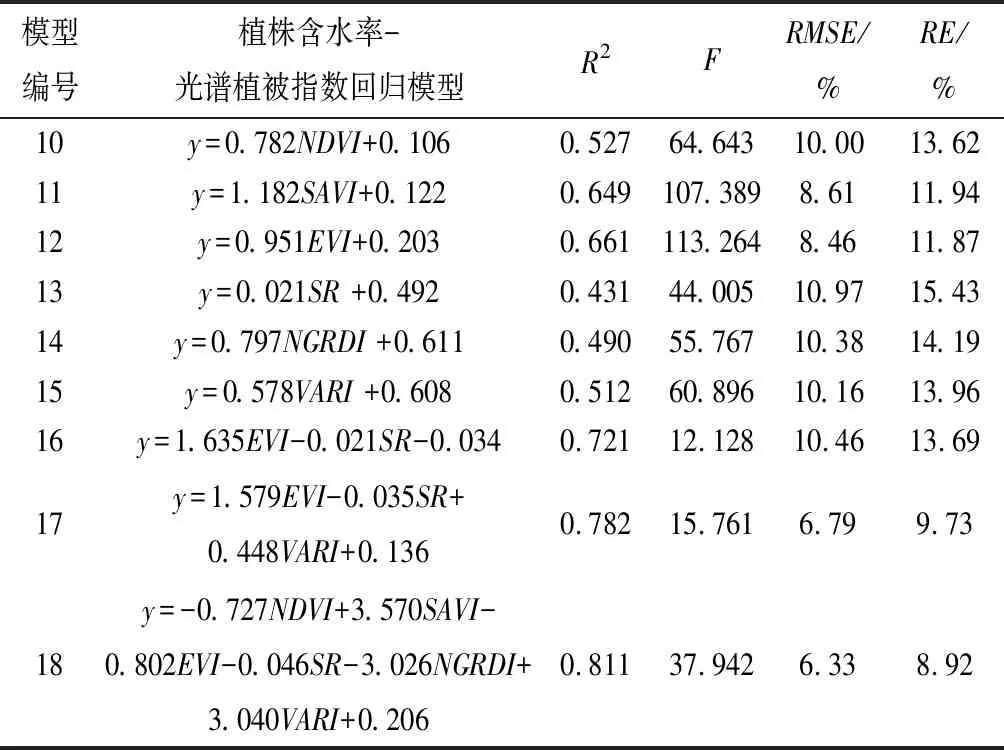
模型编号植株含水率-光谱植被指数回归模型R2FRMSE/%RE/%10y=0.782NDVI+0.1060.52764.64310.0013.6211y=1.182SAVI+0.1220.649107.3898.6111.9412y=0.951EVI+0.2030.661113.2648.4611.8713y=0.021SR +0.4920.43144.00510.9715.4314y=0.797NGRDI +0.6110.49055.76710.3814.1915y=0.578VARI +0.6080.51260.89610.1613.9616y=1.635EVI-0.021SR-0.0340.72112.12810.4613.6917y=1.579EVI-0.035SR+0.448VARI+0.1360.78215.7616.799.7318y=-0.727NDVI+3.570SAVI-0.802EVI-0.046SR-3.026NGRDI+3.040VARI+0.2060.81137.9426.338.92
2.3 模型检验
图2为不同建模方法下植株含水率的模拟值与实测值对比,表4为优选模型下植株含水率的模拟值与实测值比较,两种回归模型决定系数R2均大于0.8,均方根误差RMSE均小于6%,且相对误差RE均小于7%,说明光谱反射率模型7和光谱指数模型17的模拟精度较好,无人机多光谱遥感监测植株含水率是可行的。但光谱指数模型相较光谱反射率模型具有考虑植株内部参数的优势,在预测植株含水率时可降低环境和自身因素的干扰、实用性更强,故选模型17进行建模。作物植株含水率的敏感波段是近红外区域,这与前人的研究结果一致[19,20]。
3 结 语
本文通过对光谱反射率和植株含水率的相关性分析,利用两种回归分析方法建立光谱反射率模型以及光谱植被指数模型,通过模型的相关性(R2)、相对误差(RE)及均方根误差(RMSE)检验确定出最优的基于光谱信息的植株含水率估算模型,为实现精准作物监测提供了理论依据,进一步加强无人机多光谱遥感监测的适用性。结论如下。

图2 不同建模方法下植株含水率的模拟值与实测值对比Fig.2 Comparison of simulated and measured values of plant moisture content under different modeling methods
表4 优选模型下植株含水率的模拟值与实测值比较
Tab.4 Comparisons between simulated and measured values ofPlant moisture content under optimal selection model
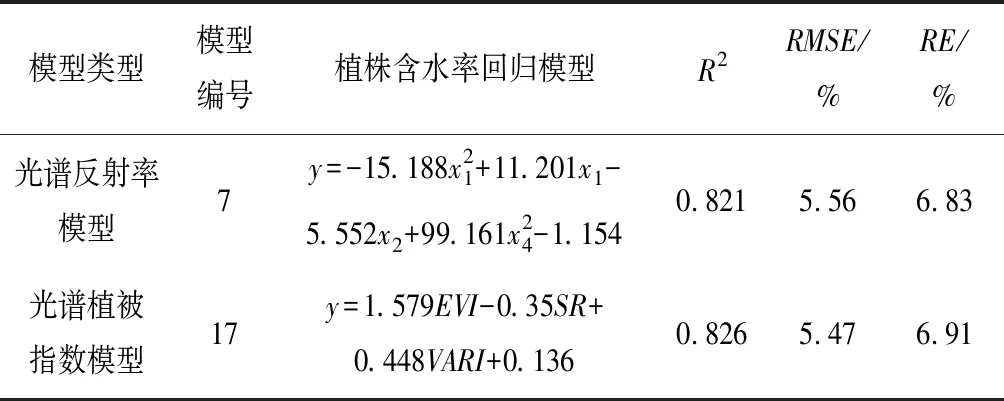
模型类型模型编号植株含水率回归模型R2RMSE/%RE/%光谱反射率模型7y=-15.188x21+11.201x1-5.552x2+99.161x24-1.1540.8215.566.83光谱植被指数模型17y=1.579EVI-0.35SR+0.448VARI+0.1360.8265.476.91
(1)单个波段平均光谱反射率与植株含水率的决定系数较低,多个波段光谱反射率建模R2均在0.65以上,模型精度较高。由近红外波段、红波段和蓝波段建立的光谱反射率模型精度高,简便稳定。
(2)基于近红外波段和红波段构建的增强型植被指数(EVI)在光谱植被指数相关性分析中决定系数R2最高。由单一光谱植被指数建模精度较低,采用多个光谱指数综合分析模型精度较高。
(3)优选的光谱植被指数模型的模拟效果优于光谱反射率模型,且考虑植株内部参数,在今后的应用中采用该模型预测植株含水率。
猜你喜欢
冶金能源(2022年5期)2022-10-14
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
草业科学(2022年3期)2022-03-26
农业机械学报(2021年8期)2021-08-27
水产养殖(2021年2期)2021-02-24
南方农业学报(2020年4期)2020-06-04
南方农业学报(2020年10期)2020-01-21
汽车文摘(2018年2期)2018-11-27
科学与财富(2018年12期)2018-06-11
