
燃料电池客车动力系统参数匹配及控制策略研究
2019-10-24 02:19宋光吉
客车技术与研究 2019年5期
宋光吉
(厦门金龙联合汽车工业有限公司, 福建 厦门 361023)
燃料电池汽车是一种高效低公害的清洁车辆,是汽车行业的发展趋势[1-2]。近年来,燃料电池汽车已经取得了初步发展,成为了各大汽车厂积极投入的研发领域[3]。本文基于我司12 m燃料电池客车的开发项目,对整车动力系统参数及控制策略进行研究。
1 动力总成参数匹配
本文燃料电池客车采用燃料电池+动力电池双能量源的方案。
1.1 驱动电机匹配设计
1.1.1 电机最大功率的确定
汽车行驶功率平衡方程见式(1)[4]:
(1)
式中:m为整车质量,18 000 kg;f为滚动阻力系数,0.007 2;A为迎风面积,9.1 m2;CD为风阻系数,0.35[5];ηT为传动系传动效率,0.9;δ为旋转质量换算系数,1.01;v为车速;α为坡度角。
1) 根据最高车速设计指标vmax=90 km/h,计算最高车速需求功率(坡度阻力功率及加速阻力功率为0),代入式(1)得最高车速需求功率P1=69.16 kW。
2) 根据最大爬坡能力性能指标:最大爬坡度tanα=20%(爬坡车速10 km/h),代入式(1)计算最大爬坡需求功率P2=112.85 kW。
3) 根据起步加速性能需求计算加速需求功率,起步加速时的车速v与时间t的关系经验公式[6]为:
v=vm(t/tm)x
(2)
式中:tm为起步加速过程时间;vm为起步加速过程结束时的车速;x为拟合系数,通常取0.5。
计算时α取0,结合式(1)和式(2)可得加速过程的行驶功率P3(t)为:
(3)
从式(3)可知,P3(t)与时间t成正相关,故加速过程最大功率P3max在加速末时刻tm,即:
(4)
将起步加速性能指标vm=90 km/h,tm=55 s,代入式(4)得P3max=183.94 kW。
4) 根据C-WTVC循环工况(GB/T 18386—2017附录D),基于Simulink 建立整车行驶模型,导入工况的路谱(全程1 800 s,包含市区、公路、高速工况),根据式(1)计算该工况下整车行驶的需求功率,如图1所示,其中循环工况最大需求功率P4max=192.60 kW,平均功率Pav=36.41 kW。
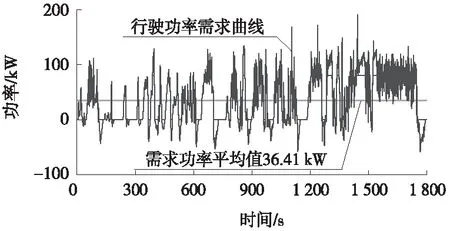
图1 C-WTVC循环工况的功率需求曲线与平均功率计算值
综上,电机最大功率Pmax的选取要满足:
Pmax≥max[P1,P2,P3max,P4max]=192.60 kW
(5)
1.1.2 电机最大转矩的确定
驱动电机的典型外特性如图2所示,在全范围内电机转矩均满足式(6):
T=9 550P/n
(6)
式中:n为电机转速,n=vi0/(0.377r);r为轮胎滚动半径,0.501 m;i0为主减速器传动比,6.14。
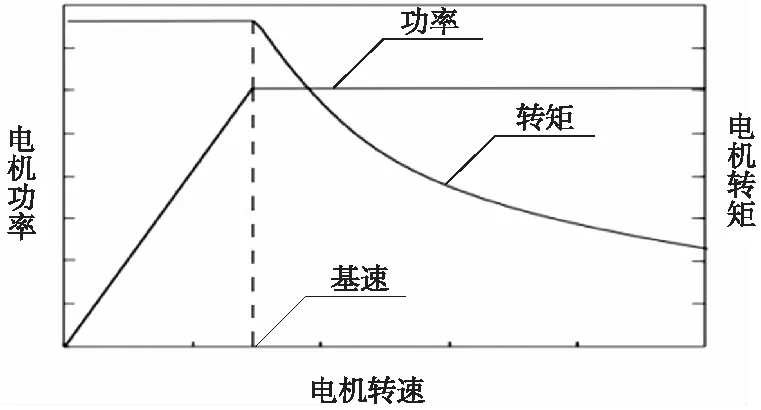
图2 驱动电机的外特性
1) 根据最大爬坡能力指标计算:因爬坡电机转速恒定且较小,故将P2及爬坡车速10 km/h代入式(6)计算最大爬坡所需电机转矩T1≥3 359.95 Nm。
2) 根据起步加速指标计算:电机外特性包括恒扭矩区和恒功率区,由于电机基速未知,加速时间可由分段积分求和得出。将电机峰值转矩记为T2,则加速时间的计算公式[7]为:

(7)
式中:ve为电机基速对应的车速,ve=(Pmax9 550/T2)·0.377r/i0;F1为恒转矩区的驱动力,F1=T2i0ηT/r;F2为恒功率区的驱动力,F2=P3max9 550×0.377ηT/v。
将起步加速性能指标vm=90 km/h,tm=55 s,和P3max=183.94 kW代入式(7)计算得:T2≥1 126.47 Nm。
3) 循环工况下电机功率及转速随工况变化,转矩需求也时刻变化,根据C-WTVC循环工况及式(6),可计算该工况下任意时刻的电机转矩需求,取其最大值可得循环工况下的电机最大转矩需求T3≥1 464 Nm。
综上,电机最大转矩Tmax的选取要满足:
Tmax≥max[T1,T2,T3]=3 359.95 Nm
1.1.3 电机最高转速的确定
根据最高车速指标确定电机的最高转速nmax:
nmax≥i0vmax/(0.377r)
(8)
将最高车速vmax=90 km/h,代入式(8)计算得:nmax≥2 925.71 r/min。
1.1.4 电机额定功率的确定
根据最高车速指标确定电机的额定功率,故电机额定功率Pr>69.16 kW。
根据以上计算,结合我司现有电机型号,电机选型的基本参数为:峰值功率250 kW,额定功率130 kW,最大转速3 500 r/min,最大转矩3 500 Nm。
1.2 燃料电池功率匹配计算
燃料电池额定功率要大于C-WTVC整车循环工况的平均功率Pav,并且满足最高车速功率需求P1[8],同时应考虑电附件的损耗,所以选择燃料电池的额定功率为PFC=80 kW。其中电附件主要包括电动转向泵、DC/DC、打气泵、动力电池水冷机组、电机电控散热器电子风扇等,这些电附件的平均总功耗PAUX约为10 kW,电附件平均功率见表1。

表1 电附件平均功率 kW
1.3 动力电池功率与电量匹配计算
燃料电池发动机存在瞬态响应性差、启动困难等弊端,在车辆启动、加速、爬坡等恶劣工况时,需要动力电池提供额外能量以满足车辆动力性要求。针对起步、爬坡、C-WTVC循环3种工况,就动力电池的功率及能量的需求进行匹配计算。
1.3.1 起步加速工况
0~90 km/h起步加速时间tm不超过55 s,燃料电池发动机的启动时间t1约为10 s,在该启动过程中,输出功率不规律上升,直到第10 s时达到额定功率。故在[0,10 s]内以极端情况假设燃料电池的输出均忽略为0,在(10 s,55 s]期间为满功率,则动力电池组必须满足[0,10 s]内的起步加速性能要求,且满足(10 s,55 s]期间整车加速功率和燃料电池功率差值的需求[9]。由前文知P3与时间成正相关,故[0,10 s]内的最大功率在第10 s时刻,代入式(3)得:P3(10)=132.44 kW。故动力电池的需求功率PBAT为:
PBAT>max[P3(10)+PAUX,
P3max+PAUX-PFC]=142.44 kW
(9)
在此期间,动力电池的放电量应满足式(10):

(10)
1.3.2 爬坡工况
根据最大爬坡度设计指标,1.1节中计算爬坡需求功率为P2,故动力电池的需求功率:
PBAT>P2+PAUX-PFC=42.85 kW
(11)
按坡长1 000 m,爬坡车速为10 km/h计算,爬坡时间t2为0.1 h,动力电池放电量为:
WBAT=PBATt2>4.29 kWh
(12)
1.3.3 C-WTVC循环工况
燃料电池主要提供稳态需求功率,动力电池主要起填谷作用[10]。基于C-WTVC循环工况(考虑电附件10 kW功率能耗)搭建Simulink整车行驶仿真模型,采用本文的功率跟随控制策略计算动力电池的补偿功率与补偿电量,需要动力电池最大补偿功率PBAT>122.6 kW,单个循环工况需要电池补偿充电量0.68 kWh,如图3所示。由于单个循环工况的里程为20.45 km,考虑整车500 km续驶里程指标,则续驶里程内所需电池补偿电量WBAT>16.63 kWh。
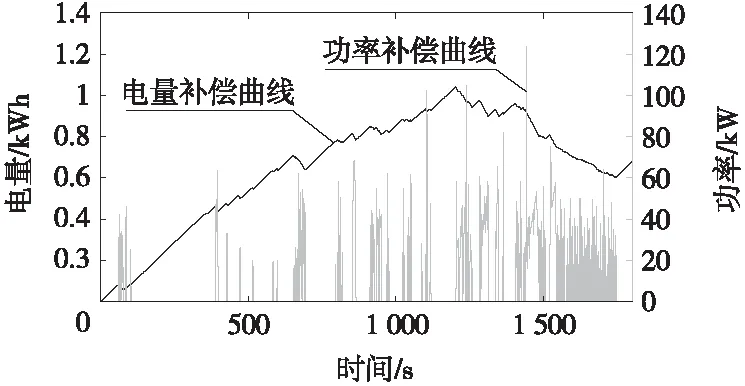
图3 C-WTVC循环工况所需动力电池的功率与能量补偿曲线
综合以上计算得:动力电池功率PBAT>142.44 kW;电量WBAT>16.63 kWh。结合我司现有产品,最终选择电量27 kWh、最大放电功率170 kW的磷酸铁锂离子电池。
2 燃料电池电动客车控制策略制定
为了避免燃料电池的频繁启停,以减少变载对其寿命的影响[11],本车采用功率跟随控制策略。客车主要采用的是质子交换膜燃料电池,中低功率区为高效区,本文所选80 kW燃料电池的特性曲线如图4所示。为避免燃料电池工作在最低效率区,设定最小允许工作点为46%@8 kW,以满足驱动燃料电池压缩机、DC/DC等电附件基本需求。本文将该燃料电池的效率特性设定为3个区:53%~54%为高效区,对应功率为12~32 kW;46%~53%为低效区,对应功率为8~12 kW和32~80 kW;46%以下为禁用区,对应功率为8 kW以下。故控制策略设定燃料电池工作功率区间为[8 kW, 80 kW],效率均在46%以上,且在满足整车正常行驶的功率需求下,尽可能工作在12~32 kW的高效区,动力电池削峰填谷以实现系统的功率平衡[12]。

图4 燃料电池特性曲线
燃料电池的输出功率跟随需求功率而变化。首先根据驾驶员油门踏板开度、刹车踏板开度以及当前的车速,判断整车需求功率,再依据需求功率的大小及当前的动力电池SOC值,合理分配燃料电池与动力电池两者的能量供给。整车正常行驶过程包括以下4个工作模式:
1) 车辆起步阶段。燃料电池动态响应慢,启动需要一段时间,此时依靠动力电池提供启动能源。
2) 轻载工况(需求功率<30 kW)。设定动力电池SOC的工作范围为40%~80%。若动力电池SOC低于40%,燃料电池不仅要满足整车行驶的需求功率,还需要给动力电池充电,使燃料电池工作在最高效工作点(30 kW恒定输出),直至动力电池SOC达到80%为止。若动力电池SOC在40%~80%内,燃料电池跟随整车需求功率工作。轻载工况功率需求较小,燃料电池基本处于中低负荷的高效区工作。
3) 重载工况(需求功率>30 kW)。此工况下整车行驶的需求功率较大,若动力电池SOC低于40%,燃料电池在满足整车行驶需求功率的同时,再以额外10 kW的功率给动力电池充电,直至动力电池SOC达到80%为止;若动力电池SOC处于40%~80%之间,燃料电池跟随整车需求功率工作,如果整车行驶需求功率超出燃料电池的额定功率80 kW,则由动力电池进行补偿。
4) 制动工况。本车采用的是机械制动与电制动的复合制动方式。当车速较低时,电机工作效率低,不进行制动能量回收;当动力电池SOC达到95%时,不再进行制动能量回收;其他情况下,动力电池回收制动能量。
3 联合仿真分析
基于最新2017AVL/Cruise搭建燃料电池公路客车仿真模型,将整车控制策略编译成DLL文件,并导入接口模块中,进行Cruise与MATLAB/Simulink的联合仿真。
设置动力电池初始SOC为80%,建立C-WTVC循环工况,全程仿真结果显示车速跟随状态良好。针对单个循环工况,仿真全程约20.45 km,仿真得出其累计氢耗量为1.19 kg,平均百公里氢耗为5.82 kg。
单个循环工况下的燃料电池效率及工作点分布情况如图5与图6所示。
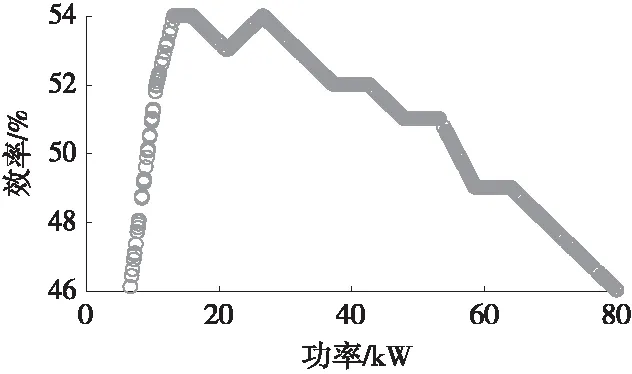
图5 燃料电池工作效率图
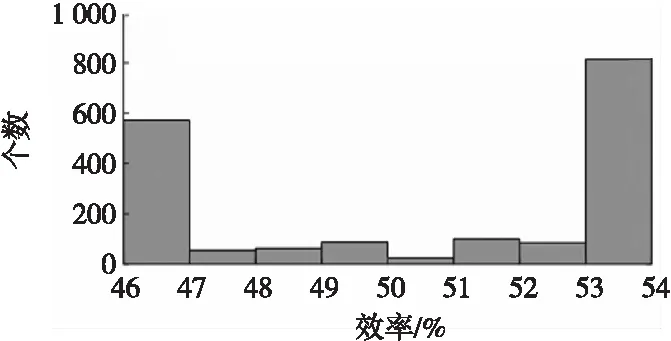
图6 燃料电池工作点的分布图
图5表明,整个工况下的燃料电池工作点都在效率46%以上;图6统计了燃料电池工作点的分布情况,表明本文控制策略下的燃料电池大部分工作在效率53%以上的高效区,同时注意到也有较多部分工作在47%以下的相对低效区,这主要是高速工况的高功率需求使得燃料电池工作在高负荷、低效率的区域。
4 结束语
通过此次研究,结果表明整个工况下的燃料电池工作点都在效率46%以上,多数工作点在53%以上的高效区,动力电池SOC控制在预期范围40%~80%之内,百公里氢耗为5.82 kg,为燃料电池客车控制策略的建模、调试、验证、优化提供参考。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
汽车实用技术(2021年23期)2022-01-05
当代陕西(2021年13期)2021-08-06
汽车电器(2020年9期)2020-09-30
当代工人(2020年1期)2020-05-11
汽车杂志(2018年6期)2018-06-25
电机与控制学报(2018年9期)2018-05-14
作文周刊·小学一年级版(2017年27期)2017-08-10
