
基于GNSS/INS紧耦合的水陆地形三维一体化崩岸监测技术
2019-10-23 08:52冯国正刘世振2杨秀川陈细润
长江科学院院报 2019年10期
冯国正,刘世振2,李 艳,彭 畅,杨秀川,陈细润,龙 洪
(1.长江水利委员会水文局 长江上游水文水资源勘测局,重庆 400020;2.长江水利委员会水文局 河道勘测管理处,武汉 430010)
1 研究背景
在崩岸易发河段、重要的险工险段、已发生崩岸河段,水陆地形是崩岸监测不可或缺的监测要素,同时也是崩岸预警、崩岸整治、崩岸应急抢险、崩岸类型识别、崩岸机理研究的基础数据。目前崩岸大比例尺地形图测绘工作中,分别测量水陆地形。陆上地形测量一般采用全站仪、RTK、无人机、地基三维激光扫描仪、船载激光扫描系统等方式,水下地形测量一般采用单波束或多波束测量技术,存在崩岸监测手段不够全面,监测范围、频次有限等局限性,只能从大尺度上掌握崩岸发生的总体情况,不能满足崩岸监测和应急抢护机制的需要[1-5]。水陆地形三维一体化测量技术具有精度高、数据全面真实、采集效率高、应用范围广等优越性,可有效解决传统崩岸地形测量中难以全面采集崩岸面地形数据的问题,但采用的导航系统为GNSS(Global Navigation Satellite System)与INS(Inertial Navigation System)独立运行系统,不能充分发挥二者优势,避免二者不足[4,6],本文作者提出采用GNSS/INS组合导航系统构建船载水陆地形三维一体化崩岸监测系统。
2 水陆地形三维一体化崩岸监测系统集成
水陆地形三维一体化崩岸监测系统主要由组合导航系统、三维激光扫描仪、多波束、数据采集与处理软件等组成,系统集成技术路线如图1所示。
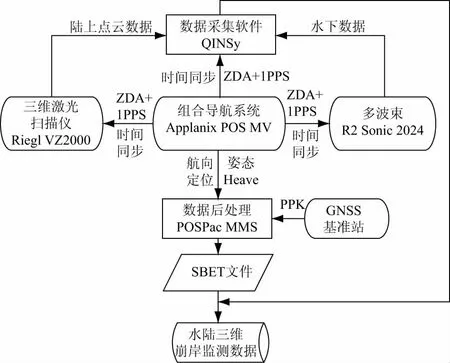
图1 水陆地形三维一体化崩岸监测系统集成技术路线
三维激光扫描仪用于陆上数据采集,多波束用于水下数据采集,组合导航系统获取位置、时间、姿态信息,POSPac MMS用于组合导航数据后处理,得到最优平滑轨迹估算(SBET)文件,QINSy用于数据采集、数据融合处理,最终获取目标坐标下的水陆地形三维监测数据。
3 GNSS/INS紧耦合技术
3.1 GNSS/INS组合导航特点
GNSS,INS已广泛应用于导航定位中,二者导航定位优缺点见表1。
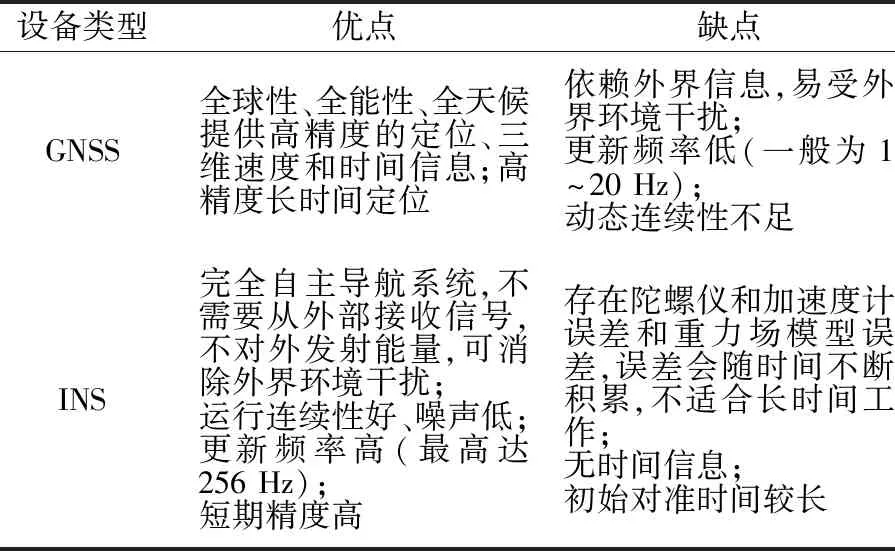
表1 GNSS、INS导航设备的优缺点[7-9]
从表1可知,GNSS与INS的观测方法和观测数据具有良好的互补性,二者组合导航可有效地“取长补短”:①GNSS提供高精度、稳定的位置信息,连续地检测INS惯性导航系统的累积误差;②惯性导航系统INS可补偿GNSS信号因遮挡而中断等问题,提供连续的姿态角,改正计算GNSS模糊度搜索方法;③利用GNSS长期定位的稳定性与高精度来弥补INS的误差随时间累积的缺点,利用INS的短期高精度来弥补GNSS接收机在受干扰时误差增大或不能定位等缺点,并借助惯性导航系统的姿态信息和角速度信息,提高GNSS接收机天线的定向性能;④借助GNSS连续提供的高精度位置信息和速度信息,估计并校正INS惯性导航系统的位置误差、速度误差和系统其他误差[7];⑤利用GNSS低频、长期高精度与INS高频、短期高精度组合实现高频高精度位置、姿态信息输出;⑥利用GNSS高频、高精度时间信息弥补INS无时间信息的不足。
3.2 GNSS/INS紧耦合技术原理
紧耦合技术[8]指的是GNSS和INS不作为独立的系统,而仅仅是作为一个测量传感器。其原理根据 INS 信息和GNSS卫星星历计算载体相对于 GNSS卫星的伪距和伪距变化率,并作为卡尔曼滤波器的测量信息,与GNSS接收机输出的伪距和伪距率进行滤波估计,同时还用于辅助GNSS码环锁相过程,其工作原理见图2。
紧耦合方式的特点[9]:GNSS为IMU提供精确的位置和速度信息,帮助克服IMU的漂移误差积累;IMU为GNSS提供实时的位置和速度信息,辅助GNSS跟踪回路,提高GNSS动态跟踪能力和抗干扰能力;在IMU的辅助下,利用GNSS接收到尽可能多的卫星信息来提高滤波修正的精度,同时也能对GNSS接收机信息的完整性进行检测。它是一种算法复杂的、先进的组合方式。GNSS/INS 紧耦合导航在卫星颗数<4的情况下仍能够为组合导航数据融合提供观测值,有效实时地修正 INS 误差项,因此在GNSS卫星半遮蔽区域具有很大的优势[10]。
3.3 Applanix IN-Fusion技术
3.3.1 Applanix IN-Fusion技术原理
Applanix公司的POSMV产品紧耦合采用IN-Fusion技术,该技术采用更深层次的传感器集成和误差模型。与标准辅助导航模式相比,IN-Fusion技术采用单一集中集成卡尔曼滤波器直接处理GNSS观测的原始伪距和载波相位数据,用于辅助INS导航定位,最终输出所需的定位、定姿、时间、Ture Heave信息,其工作原理如图3所示。
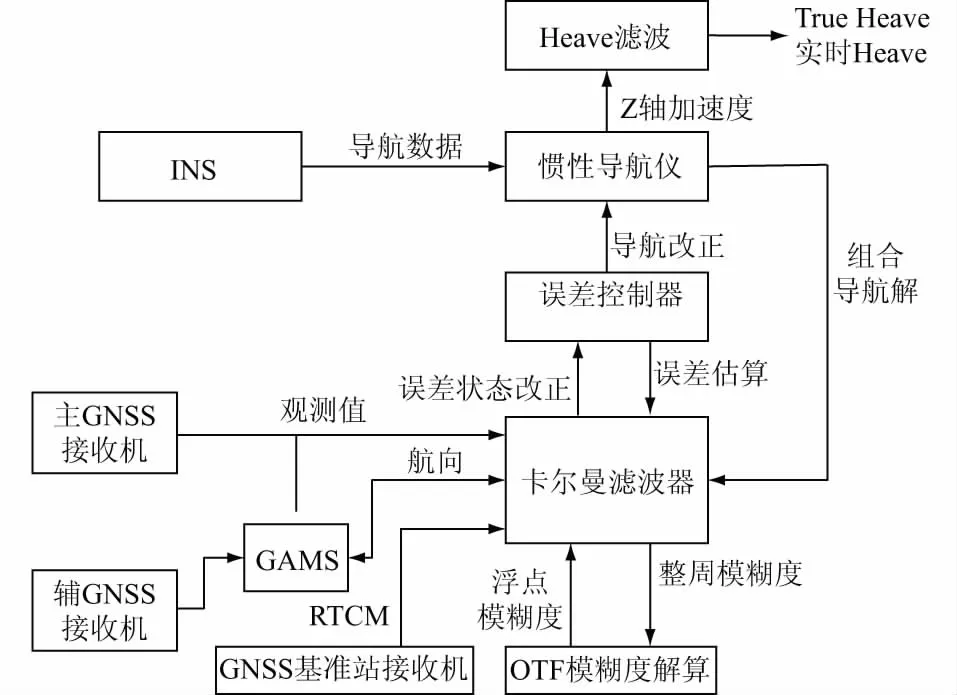
图3 Applanix IN-Fusion技术原理
3.3.2 GNSS方位测量子系统(GAMS)
IN-Fusion技术包含GAMS,可限制高纬度地区航向精度降低问题,GAMS是由GNSS主天线和辅天线组成GNSS罗经,其工作原理如图4所示。
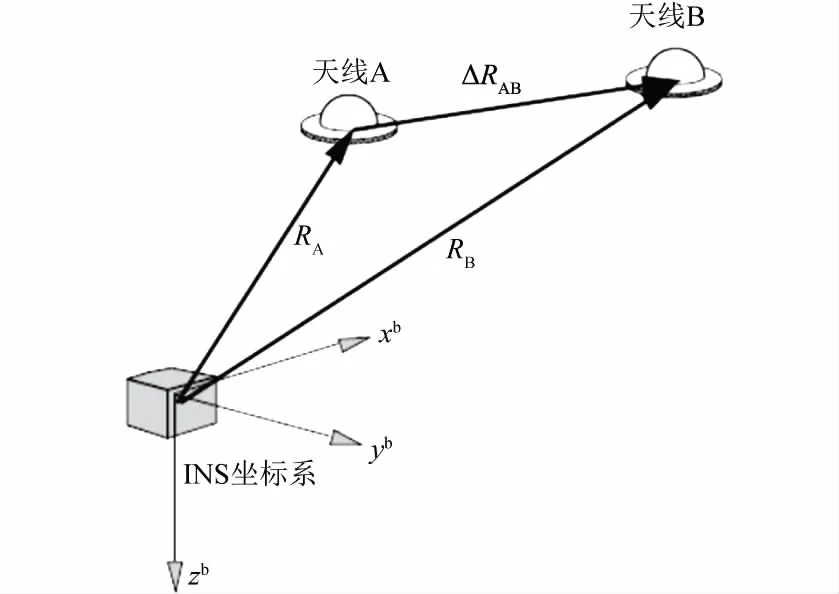
图4 GAMS工作原理
技术原理为:①基于载波相位差分计算出天线A,B间的航向向量ΔRAB;②利用INS输出的Roll(翻滚角)、Pitch(俯仰角)、Heading(航向角)校正航向向量精度;③自我校正,利用INS与天线A,B的轴线关系,计算出天线基线向量;④利用卡尔曼滤波器融合处理双天线航向、加速度航向、INS航向,得到最优解。
3.3.3 数据处理
POSMV数据利用POS View软件记录,将记录数据导入POSPac软件即可进行组合导航数据后处理,惯性导航辅助动态后处理(IAPPK)数据解算过程如图5所示。
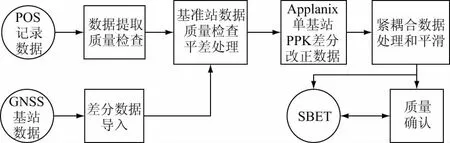
图5 POSPac IAPPK数据处理流程
数据处理具体流程为:导入POS数据→导入基准站数据,设置地面坐标值→运行SingleBase,生成SingleBase观测值→执行GNSS/INS组合差分计算(前向、后向、组合、平滑)→合差分计文件。
4 实 例
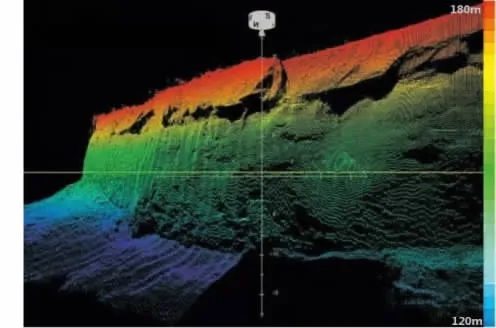
图6 水陆地形三维点云数据
长江某河段危岩监测,利用三维激光扫描仪Riegl VZ 2000、多波束R2 Sonic 2024、GNSS/INS紧耦合惯性导航系统Applanix POSMV等硬件集成水陆地形三维监测系统。组合导航数据采集采用POS View软件、数据处理采用POSPac MMS软件。水陆地形数据采集、导航后处理SBET文件与水陆地形点云数据融合采用QINSy软件,最终获取目标坐标下的水陆地形三维监测数据,如图6所示。
4.1 组合导航数据处理分析
4.1.1 GNSS数据质量
跟踪的各GNSS星座卫星数及总卫星数见图7(a),GNSS定位误差见图7(b)。
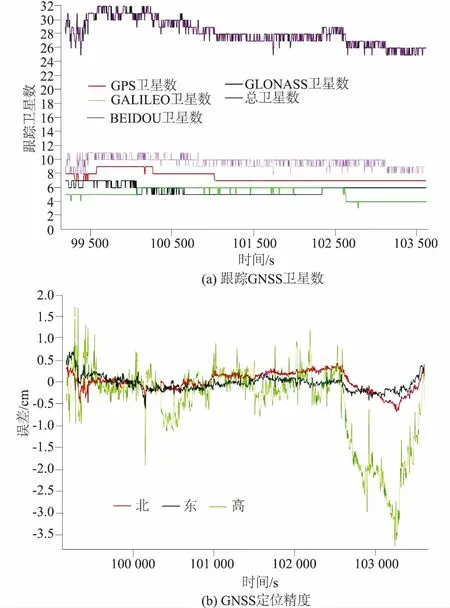
图7 跟踪的GNSS卫星数和GNSS定位精度
GNSS基线精度统计如表2所示。
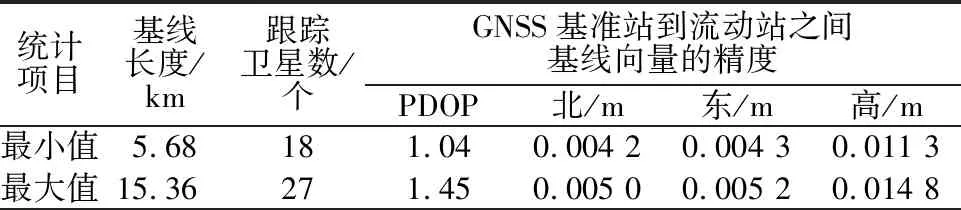
表2 GNSS基线质量统计
位置精度因子(Position Dilution of Precision,PDOP),由于GNSS观测成果的好坏与被测量的人造卫星和接收机间的几何形状有关且影响较大,所以计算上述所引起的误差量被称为精度的强弱度。PDOP表示三维位置定位精度与接收机几何配置关系的一个参数,数值越小,精度越高。由图7和表2可知,GNSS平面精度均<1 cm,高程精度<1.5 cm。
4.1.2 姿态误差
组合导航姿态Roll、Pitch中的误差见图8(a),Heading中的误差见图8(b)。姿态精度统计见表3。由图8及表3可知,姿态误差中Roll、Pitch精度均<0.025 arc/min,Heading精度均<0.6 arc/min。
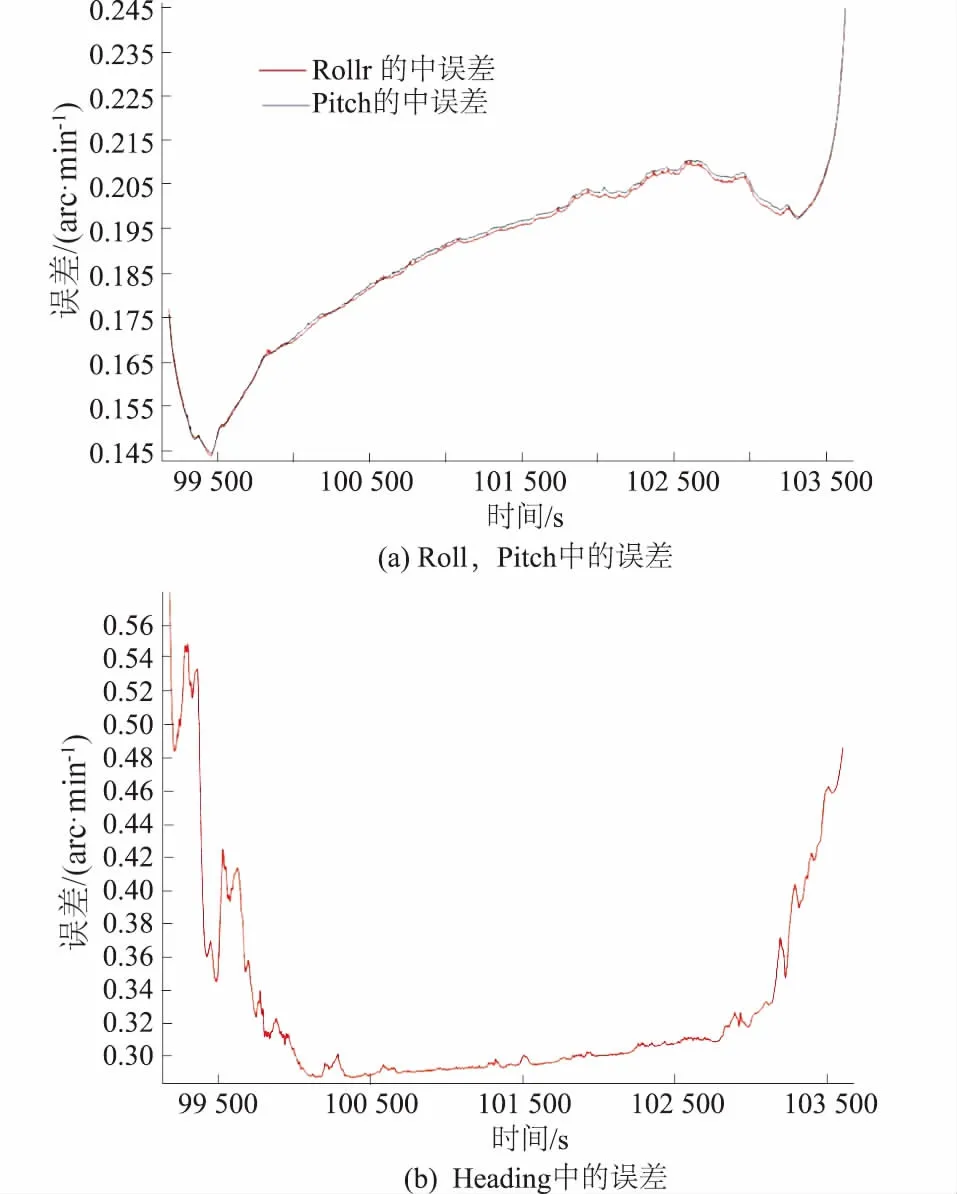
图8 Roll,Pitch中的误差和Heading中的误差
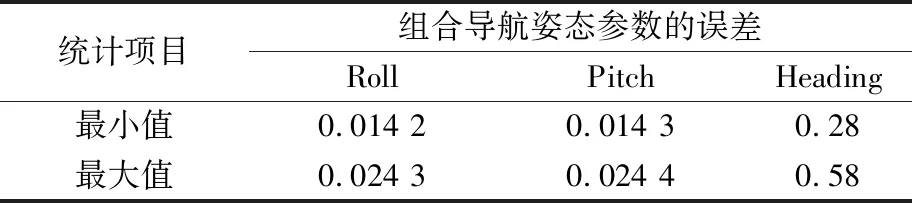
arc/min
4.1.3 最优平滑轨迹精度
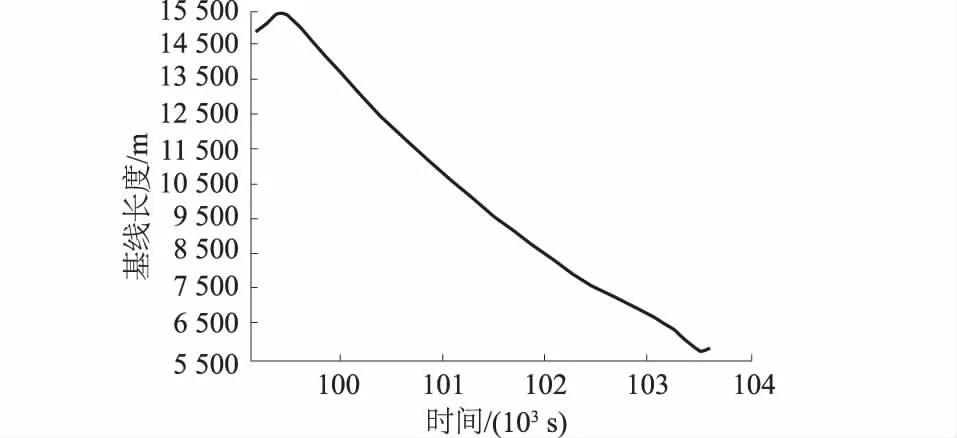
图9 各轨迹点基线长度
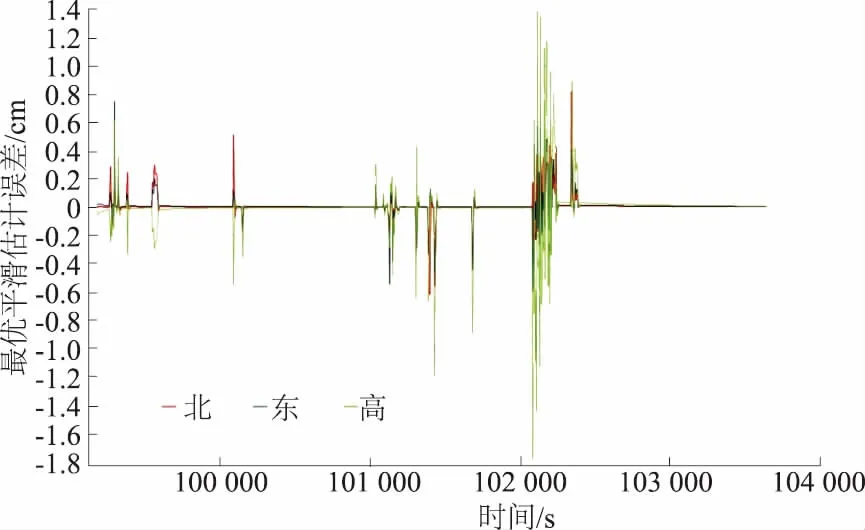
图10 组合导航最优平滑估计误差
各轨迹点基线长度见图9;经IN-FUSION算法,处理后最优平滑轨迹精度各分量误差见图10。最优平滑轨迹精度各分量精度统计见表4。
由图9、图10可知,在基线长达15 km范围内,基线长度对精度无影响。由图10、表4可知,经最优平滑处理后北、东向精度<1 cm,高均<2 cm,可满足高精度崩岸监测需求。

表4 最优平滑轨迹精度各分量精度统计
4.2 水陆地形数据融合处理
水陆地形三维数据与组合导航后处理数据融合处理采用QINSy处理,其数据处理流程见图11。
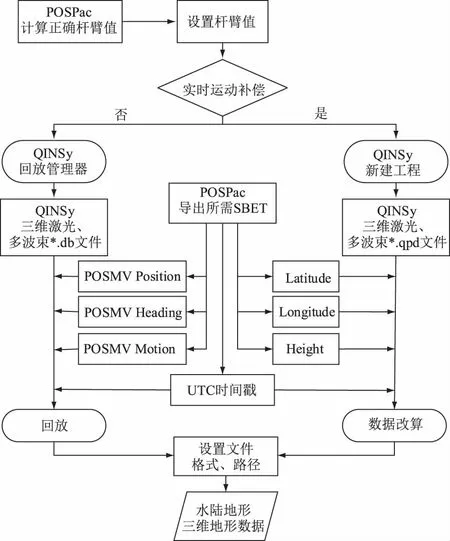
图11 组合导航与水陆地形三维数据融合处理流程
首先设置各传感器相对于参考系的位置,即杆臂值,一般以惯性导航系统的相位中心作为参考系原点。GNSS天线相对于参考系原点位置关系可利用POSPac软件经数据后处理获取。在数据采集时,可进行实时运动补偿,也可在数据后处理时进行运动补偿。未进行实时运动补偿,则采用QINSy软件“回放”模块进行数据处理,选择需要改算的*.db文件,依次导入经POSPac后处理得到的POSMV Position,POSMV Heading,POSMV Motion文件,加入UTC时间戳,通过“回放”功能实现组合导航后处理数据与水陆地形三维点位信息时空匹配;经实时运动补偿,则无需进行姿态改正,通过新建工程,选择需要改算的*.qpd文件,仅设置利用Latitude、Longitude、Height进行位置改算即可,其运算速度较前者的运算速度更快。
4.3 点位精度评定
4.3.1 三维激光点位精度评定
利用QINSy软件导出的*.las格式的点云数据,读取各特征地物点坐标,将其与RTK实测地物点进行坐标比较,如图12所示。
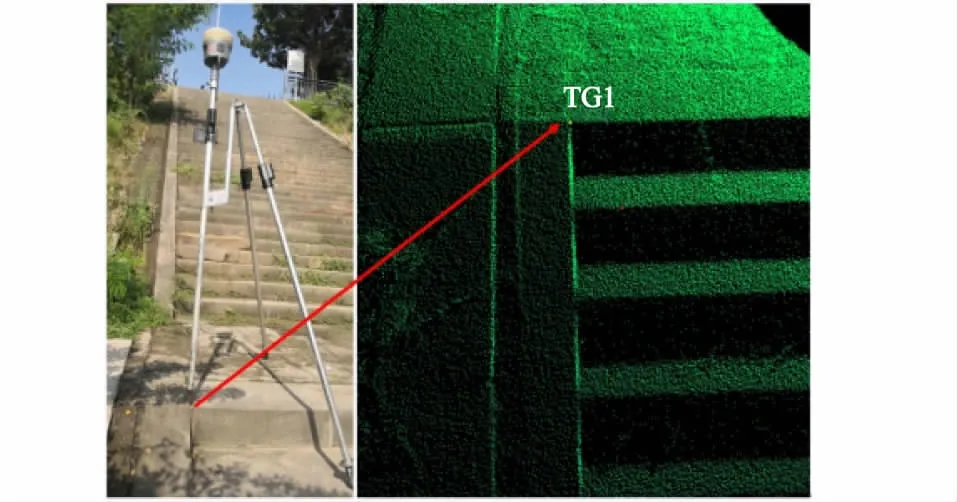
图12 激光点云数据精度评定
利用白塞尔公式进行误差计算,对点位精度进行评定,其公式为
(1)
式中:m为中误差;V为坐标较差;n为点数。
计算得各分量坐标的误差为mX=0.069 m,mY=0.078 m,mH=0.092 m。
4.3.2 多波束测深精度评定
在测区布设测深检查线,利用单波束测深仪按检查线测量水深值,利用多波束测得水深内插至单波束点位水深,如图13所示。
在考虑水位影响的情况,利用式(1)进行多波束测深精度评定。经计算得测深精度m深=0.141 m。
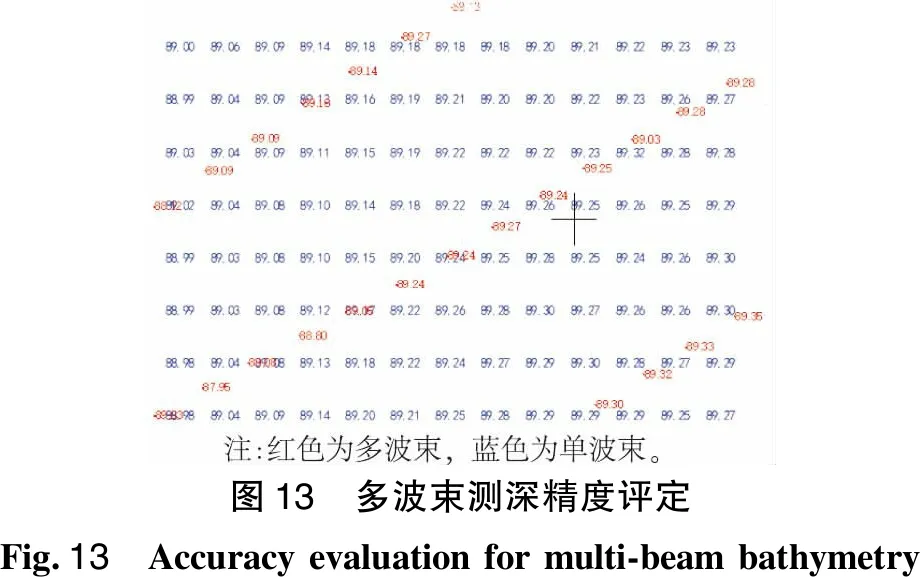
图13 多波束测深精度评定Fig.13 Accuracy evaluation for multi-beam bathymetry
经质量评定,陆上点云数据的误差<10 cm,水域测点的误差<15 cm。
5 结 论
首次提出基于紧耦合惯性导航技术的船载水陆地形三维一体化崩岸监测系统集成技术,介绍该系统的各传感器工作原理及其作用、数据流;阐述GNSS/INS组合导航原理、特点及数据处理流程;说明利用紧耦合导航数据与水陆地形三维崩岸监测数据时空匹配的流程及方法。经实例数据分析得出如下结论:
(1)紧耦合惯性导航技术充分发挥GNSS与INS优势,弥补二者不足,其后处理最优轨迹估算的三维精度<2 cm。
(2)提出基于GNSS/INS紧耦合导航定位技术的多波束、三维激光扫描仪集成水陆地形三维一化崩岸监测系统的硬件集成、数据融合匹配处理技术,提供崩岸监测新的技术方案。
(3)经实测数据精度评定,水陆三维地形崩岸监测系统陆域点云精度三维坐标分量<10 cm,水域多波束测深精度<15 cm,可满足崩岸监测精度要求。
猜你喜欢
国画家(2021年4期)2021-10-13
科学与财富(2021年36期)2021-05-10
成都信息工程大学学报(2021年6期)2021-02-12
今日农业(2020年20期)2020-12-15
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
能源(2018年10期)2018-12-08
能源(2016年10期)2016-02-28
现代企业(2015年6期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
