基于小扰动线性模型的横侧向各种模态特性的分析
2019-10-21 08:02李俊财王健
锦绣·上旬刊 2019年7期
关键词:特征值
李俊财 王健

摘 要:通过使用 Matlab/simulink 软件,搭建仿真程序,实现对各种横侧向运动的模拟情况下的飞行器模型进行仿真。利用水平无侧滑飞行条件φ=β≡0 和p=r≡0,可以将飞行器运动方程解耦为不依赖于纵向运动方程的横侧向方程。对该方程,进行小扰动线性化,可以获得关于飞行器横侧向的线性动态方程。
关键词:线性动态方程;特征值;仿真引言
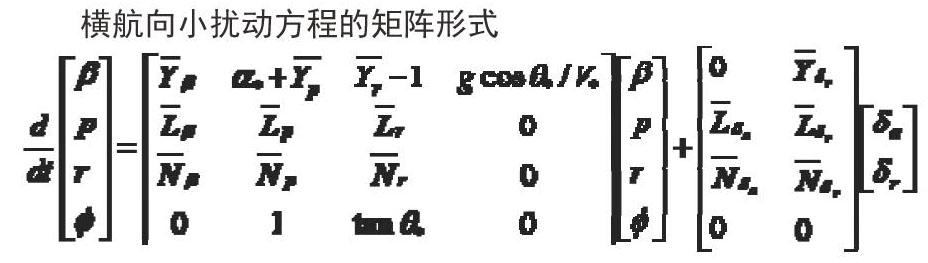
横航向小扰动方程的矩阵形式
飞机是一个气动力学的产物,由于其运动环境的特殊性,做出实物实验的可能性低且成本较高,目前国内外都通过软件仿真的形式来获得其在特定条件下的运动数据,本文就基于小扰动线性模型的横侧向各种模态特性进行分析。
1 飞机纵向运动的各种模态
飞机的横侧向运动有滚转模态、螺旋模态和荷兰滚模态。
(1)滚转模态
滚转收敛模态是快速收敛的非周期运动。对应特征方程绝对值最大的实根,该模态是快速收敛的非周期运动。对于一般飞机,正迎角下往往具有较大的滚转阻尼,而绕 ox 轴的惯性矩却是三个自由度最小的,使飞机受扰动时引起的滚转角速度很快在气动阻尼力矩作用下消失。
(2)螺旋模态
飞行器在飞行过程中,横侧向容易发生的一种不稳定状态,学术上称为螺旋模态。这种运动模态的时间常数(周期)很大,是一种缓慢收敛或发散的运动,对飞机有一定的影响,应作为飞机设计的一项标准。
(3)荷兰滚模态
荷兰滚模态也称为振荡模态,是横航向动稳定性的三种典型模态之一,对应于横航向小扰动运动方程的一对复根。其主要运动特征是:滚转阻尼运动结束后,滚转角、侧滑角和偏航角呈频率较高的周期性变化。特点:飞机一面左右偏航,一面来回滚转;飞机向左转时,偏航角速度小于 0;基本处于右滚状态,滚转角大于 0。原因:飞机的航向惯性阻尼力矩与静稳定力矩不平衡,引起绕 y 轴的振荡运动,使侧滑角周期变化,引起周期性变化的滚转力矩,使滚转角、滚转角速度周期运动。
2 通过对横侧向线性模型矩阵的提取,得到横侧向线性模型的相应 A,B 矩阵
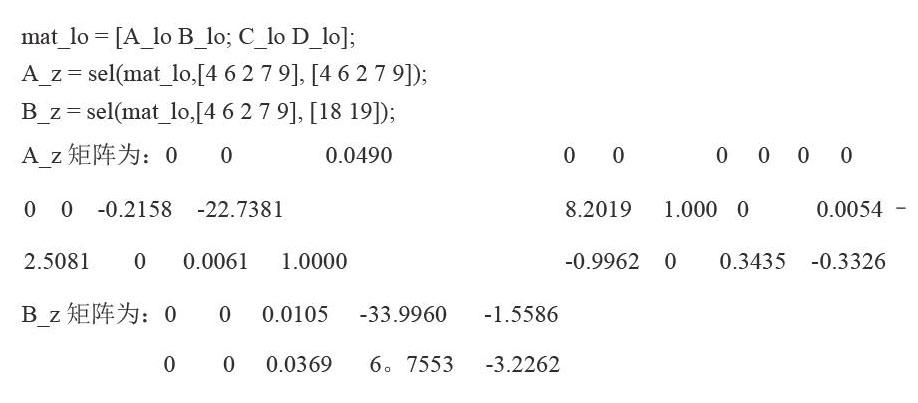
因为在实际横侧向运动中不依赖于偏航角(滚转角,侧滑角,滚转角速率,偏航角速率),所以将第二个变量偏航角剔除得到相应的与四个变量相关的新矩阵
得到4个状态量与2个控制变量,建立横侧向线性模型:
得A,B矩阵后,写出4个状态量同两个控制变量的矩阵算法,得出结果。
3 根据已知的 A 矩阵计算横侧向模型的特征值:
eig(A)可得,有以下四个特征根:
-0.2450 + 2.8973i -0.2450 - 2.8973i -2.5560 -0.0105
4 计算各种模态的相应特征值并求解对应的周期、频率和阻尼比:
(1)运用函数 damp 计算对应的频率和阻尼比:[Wn,p,Z]=damp(A);可得到:频率
Wn=2.9076 2.9076 2.5560 0.0105 阻尼比:0.0843 0.0843 1.0000 1.0000.
进而可得 3 种模态下的对应 T 和阻尼比以及特征值:
模态 特征值 周期T 阻尼比
荷兰滚 - 0.2450±2.8973j 0.3439 0.0843
滚转 - 2.5560 0.3912 1
螺旋 - 0.0105 95.5013 1
5 搭建仿真模型,對横侧向运动情况下的各个变量进行仿真:
给定四个变量初始条件分别为 x =[β,φ,p,r]T=[0.1 0.2 0.1 0.1],给定输入为阶跃响应。
6 结论
(1)三组特征值对应了飞机横侧向运动的荷兰滚模态、滚转模态、螺旋模态。荷兰滚模态周期短、阻尼大;滚转阻尼模态对应了一个大的负根,受机翼产生的较大阻尼力矩的阻止而很快结束,一个小的正根对应着螺旋模态的特点。
(2)三种模态中各个变量的占比也不同,荷兰滚和螺旋模态中通常包含着很小的侧滑。荷兰滚模态几乎是围绕着稳定坐标系 x 轴的纯滚动运动,而螺旋模态则是由带有滚转运动的偏航运动组成的。螺旋模态通常是不稳定的,包含着不断增加的偏航角和滚转角以及向下增大坡度的螺旋运动。
猜你喜欢
中学生理科应试(2021年11期)2021-12-09
电脑知识与技术(2017年33期)2017-12-13
湖南师范大学学报·自然科学版(2017年2期)2017-06-02
新教育时代·教师版(2016年32期)2017-05-08
课程教育研究·新教师教学(2016年18期)2017-04-12
课程教育研究·新教师教学(2016年32期)2017-04-10
数学学习与研究(2017年1期)2017-03-27
数学学习与研究(2017年1期)2017-03-27
数学学习与研究(2016年19期)2016-11-22
中国市场(2016年22期)2016-07-07