基于Fuzzy-PID控制的平行泊车仿真
2019-10-21 09:41杨向彬
汽车实用技术 2019年11期
杨向彬

摘 要:采用Fuzzy-PID控制算法进行路径跟踪,根据建立的车辆阿克曼转向模型针对自动泊车的平行泊车过程进行Matlab/Simulink仿真,通过设定车辆处于不同初始位置检验车辆能否顺利泊车入位,来验证控制算法的可靠性,找到车辆可以正确停车的初始位置范围。
关键词:自动泊车;模糊控制;PID控制;阿克曼转向模型
中图分类号:U461.6 文献标识码:A 文章编号:1671-7988(2019)12-132-04
Abstract: Fuzzy-PID control algorithm is used to track the path ,According to the established Akman steering model, the parallel parking process of automatic parking is simulated by MATLAB/Simulink. The reliability of the control algorithm is verified by setting the vehicle at different initial positions to check whether the vehicle can park smoothly or not, and the range of initial position where the vehicle can park correctly is found.
Keywords: automatic parking; fuzzy control; PID control; Ackerman steering model
CLC NO.: U461.6 Document Code: A Article ID:1671-7988(2019)12-132-04
前言
随着经济发展,我国汽车保有量飞速增长,城市中狭小的空间拥挤的道路状况随之带来停车难的问题。而且因为倒车入车位造成的交通事故频发,因此出现了自动泊车技术来代替人进行停车动作解决停车难的问题,自动泊车技术采用全景摄像头、超声波测距传感器等多个传感器配合使用[1],通过主控制器规划路径,采用某种控制算法以及执行装置,自动控制车速、方向盘及制动踏板进行跟踪路径[2]完成泊车入位。替代驾驶者安全、快速、准确地完成泊车操作,不仅节省时间降低停车难度,而且能有效避免由于泊车造成的交通事故。自动泊车技术控制算法是核心问题,目前国内外对控制策略进行了大量研究,长安大学贺伊琳,马健等人提出一种RBF神经网络的滑模横向控制策略[3],梁钊,郑国强等提出一种自组织模糊控制的路径跟踪控制器[4],侯忠生,董航瑞等提出一种坐标补偿的无模型自适应控制[5],哈工大的王聪研究了一种基于预瞄的车辆路径跟踪[6]。采用Fuzzy-PID控制策略,采用两段圆弧[7]的泊车方式,针对特定车型及车库参数进行simulink仿真,验证设计的模糊控制策略的效果,并得到可成功自动泊车的初始位置范围。
1 车辆数学模型
根据车辆相对于泊车位的方向,可大致分为平行泊车、垂直泊车和斜泊车入位。只研究平行泊车的情况,针对车辆低速倒车这一运动建立车辆运动学模型,根据建立的车辆运动学模型进行路径规划,汽车车身本是复杂的曲面,但考虑到自动泊车只是为了避障,因此以车身最大外尺寸简化成如下刚体结构,因此可以建立经典的阿克曼转向模型如下图所示。
汽车在倒车的过程中,由于后轮与车身的运动方向一致,后轮的运动轨迹能够体现车辆运动轨迹。分析公式(12)可以看出忽略车辆后轮侧滑的条件下任意时刻车辆的轨迹与倒车速度无关,主要与车辆的转向角和轴距有关,倒车速度大小只会造成单位时间内行驶距离的长短不同不会对行驶路径有影响。车辆的运动轨迹可以用(xr,yr,θ)表示,为了方便起见,可以用(x,y,θ)来表示,此时,车辆轨迹变化的控制量为(x, y,θ),直接控制输出量为φ。完成平行泊车的时候应该有 φ=0(或接近零度角)。
采用经典的两段圆弧式泊车路径,首先车辆识别可停车位后倒车,當汽车前轮轴轴心与停车位的前边线处于一条直线的时候开始停车转向,将方向盘向右打死转向一定角度θ后,回正方向盘,然后再将方向盘左打死转动一定角度θ后,完成泊车。整个过程中以可能发生的碰撞点为约束条件,车速定速为5Km/h,从而通过仿真的方法求出可靠停车的初始泊车位置。泊车过程如图2所示。
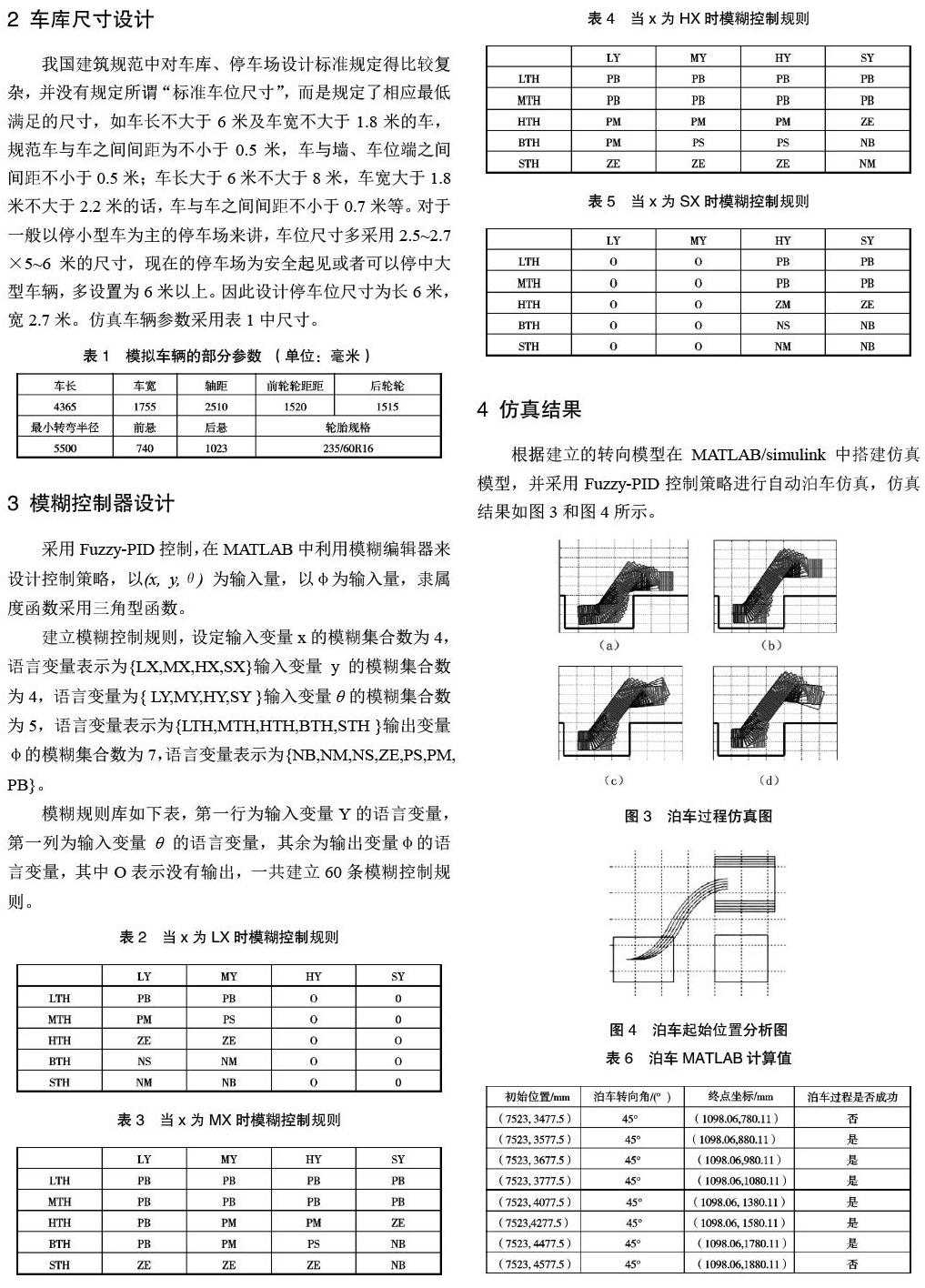
2 车库尺寸设计
我国建筑规范中对车库、停车场设计标准规定得比较复杂,并没有规定所谓“标准车位尺寸”,而是规定了相应最低满足的尺寸,如车长不大于6米及车宽不大于1.8米的车,规范车与车之间间距为不小于0.5米,车与墙、车位端之间间距不小于0.5米;车长大于6米不大于8米,车宽大于1.8米不大于2.2米的话,车与车之间间距不小于0.7米等。对于一般以停小型车为主的停车场来讲,车位尺寸多采用2.5~2.7×5~6米的尺寸,现在的停车场为安全起见或者可以停中大型车辆,多设置为6米以上。因此设计停车位尺寸为长6米,宽2.7米。仿真车辆参数采用表1中尺寸。
3 模糊控制器设计
采用Fuzzy-PID控制,在MATLAB中利用模糊编辑器来设计控制策略,以(x, y,θ) 为输入量,以φ为输入量,隶属度函数采用三角型函数。
建立模糊控制规则,设定输入变量x的模糊集合数为4,语言变量表示为{LX,MX,HX,SX}输入变量y的模糊集合数为4,语言变量为{ LY,MY,HY,SY }输入变量θ的模糊集合数为5,语言变量表示为{LTH,MTH,HTH,BTH,STH }输出变量φ的模糊集合数为7,语言变量表示为{NB,NM,NS,ZE,PS,PM, PB}。
模糊规则库如下表,第一行为输入变量Y的语言变量,第一列为输入变量θ的语言变量,其余为输出变量φ的语言变量,其中O表示没有输出,一共建立60条模糊控制规则。
4 仿真结果
根据建立的转向模型在MATLAB/simulink中搭建仿真模型,并采用Fuzzy-PID控制策略进行自动泊车仿真,仿真结果如图3和图4所示。
由于自动泊车过程是识别可停车位以后倒车,后轮轴中心点横坐标位置对泊车成功与否没有影响,主要是通过改变纵坐标来寻求可成功泊车的初始位置。在所选用的车型尺寸及设定的车位尺寸的前提下,通过分析表格数据可知,按照设计的模糊控制规则,车辆后轮轴中心点初始位置坐标在(7523,3477.5)时会自动泊车失败主要是因为车辆轮廓边线与车位底边线发生接触,初始位置在(7523, 4577.5)时也会泊车失败因为车辆未能停入车位。初始位置纵坐标y在[3577.7,4477.5]区间内可以在设计的Fuzzy-PID控制策略下完成自动泊车任务。
5 结论
自动泊车技术是时下新兴热点技术,虽然国内外已有大量研究,但技术还未成熟未能达到量产的程度,针对特定尺寸的车型在特定尺寸的车位进行自动泊车工况进行研究,搭建阿克曼转向模型,采用Fuzzy-PID控制策略进行自动泊车仿真试验,找出可成功停车的车辆初始位置范围。
参考文献
[1] 禄盛,黄显杭,苏岭.自动泊车系统模型研究与实车验证[J].重庆邮电大学学报(自然科学版),2014:100-107.
[2] 郭孔辉,李红,宋晓琳.自动泊车系统路径跟踪控制策略研究[J].中国公路学报,2015(09):110-118.
[3] 贺伊琳,马建,赵丹.无人驾驶汽车RBF神经网络滑模横向控制策略[J].长安大学学报(自然科学版),2018,38(05):244-254.
[4] 梁钊,郑国强,李济顺.自组织模糊控制的自动泊车路径跟踪控制器[J].火力与指揮控制,2013(09):54-58.
[5] 侯忠生,董航瑞,金尚泰.基于坐标补偿的自动泊车系统无模型自适应控制[J].自动化学报,2015(04):157-165.
[6] 王聪.基于预瞄的车辆路径跟踪控制研究[D].哈尔滨工业大学,2014.
[7] Gomez-Bravo, F., F.Cuesta, and A.Ollero. Parallel and diagonal par -king in nonholonomic autonomous vehicles[J].Engineering Applica -tions of Artificial Intelligence14.4, 419-434, 2001.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
现代电子技术(2009年13期)2009-08-31