基于模糊控制算法的智能小车避障系统设计*
2019-10-16 08:30车雨红
首都师范大学学报(自然科学版) 2019年5期
车 雨 红
(渭南师范学院数理学院,陕西 渭南 714099)
0 引 言
智能小车作为当前智能化的代表,集合人工智能、自动控制、传感采集等技术,成为当前智能汽车发展趋势.目前,针对智能小车的控制中,大部分采用嵌入式的编程方式来实现汽车的启动、停止以及速度方面的控制.但在实际道路运行的过程中,如何避让前方的障碍物,加强路径规划是其中的重点.障碍物检测与避障方面成果已有不少,见参考文献[1-7].其中,高俊钗和宁江坤[1]指出智能小车的运动控制不依赖于精确的运功控制模型,即其运动为非线性系统.为解决这个问题,人们引入模糊控制理论对智能小车避障进行控制.同时在智能小车避障解决问题中,吕闪等[2]从硬件和软件的角度,对智能小车避障进行控制,并通过测试,验证了STM32控制芯片和模糊控制避障算法的可行性;张桥[3]结合传感器采集过程中存在的多信息融合问题,提出一种基于T-S模型的模糊神经网络避障控制算法,并通过仿真测试,验证了上述方案的可行性.但是,加强对障碍物避障的更为精确的控制,加强对小车路径的规划,一直是当前研究和优化的重点.对此,结合系统设计的思想,提出了一种基于模糊神经PID控制的避障算法,并通过硬件和软件的搭建,对上述方案进行了验证.
1 整体架构设计
设计的STM32智能小车避障控制系统,其主要具备自主避障、障碍自动检测、无线通信等功能.要实现小车的自动避障,首先需要采用避障传感器完成对前端基础数据的采集,然后通过主控芯片的处理和分析,发布控制指令,最终通过转向控制系统和速度控制系统完成对小车障碍物的避让控制.因此,结合以上的思路,本文将该系统的整体架构设计如图1所示.

图1 系统整体架构设计
2 系统硬件电路设计
2.1 主控电路设计
主控电路是智能小车工作的基础,也是关键.目前针对小车车主控模块的设计中,部分采用ARM是当前的一个趋势.本文则选择STM32F103作为主控芯片,然后通过软件编程的方法,完成对小车前方障碍物的避让,并实现路径的规划.采用STM32F103芯片,是该芯片具有高性能、低功耗的特点.同时为提高系统运行的效率,引入了有源晶振,以提高系统的抗干扰能力,保证高效和稳定运行.具体电路图如图2所示.
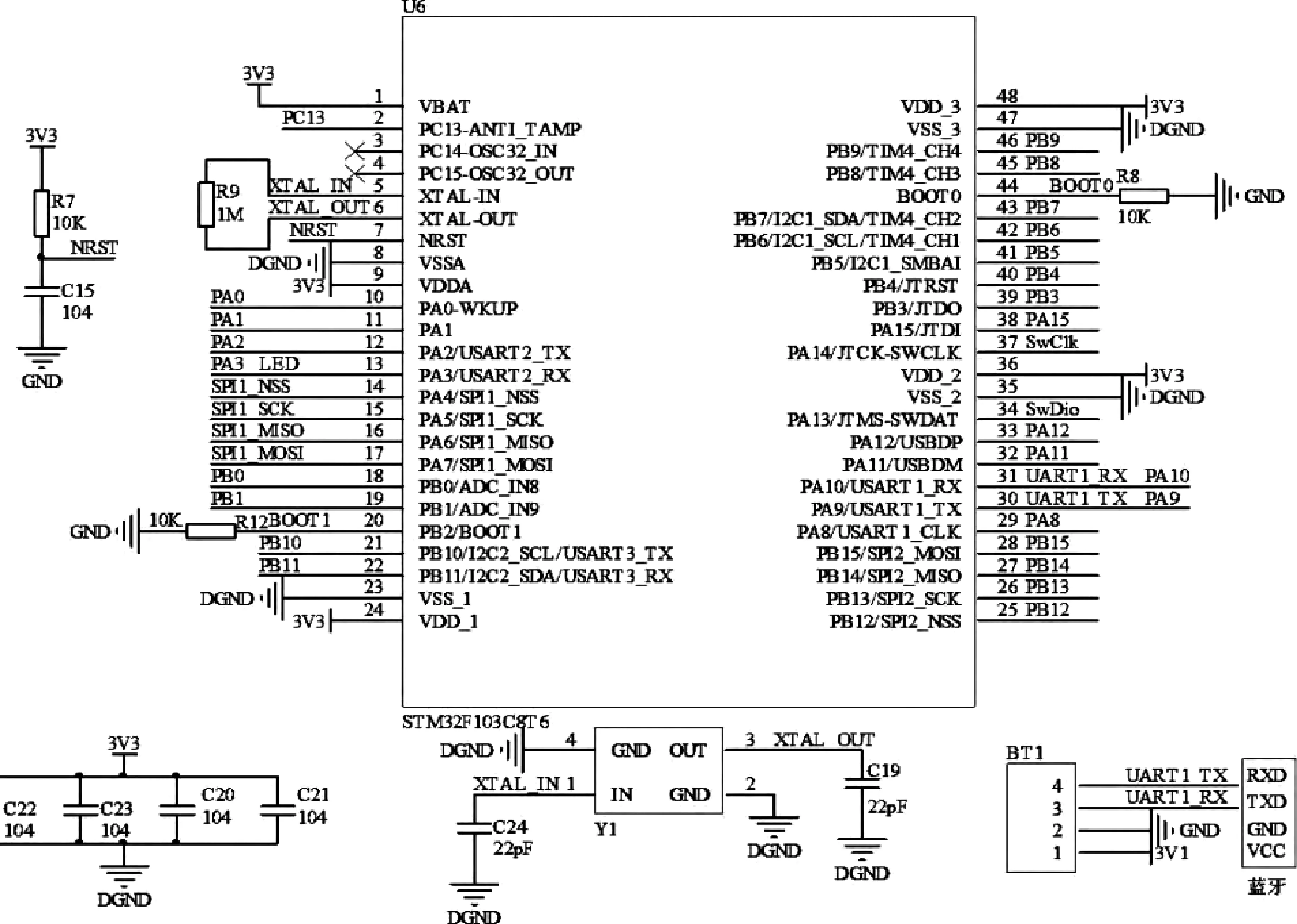
图2 主控电路设计
2.2 超声测距模块设计
超声波传感器测距作为障碍物距离检测的重点.该传感器测距的原理是超声波存在反射效应,当接收器在接收到超声波信号后,谐振片产生谐振效应,从而将这种效应转变为脉冲信号,最后再通过信号放大的原理,对信号进行计算.本文则采用LM393A放大器对信号进行放大,具体的电路图如图3所示.

图3 放大电路设计
3 系统软件设计
3.1 整体流程设计
整体流程是小车避障控制的基础,也是关键.而结合图1的整体架看出,当智能小车在运动的过程中,首先会进行数据的初始化;然后启动超声波测距模块,如在出范围内存在障碍物,则将测量的误差和方向角度传递给主控芯片;然后通过模糊控制算法,完成对电机和方向转角完成避障.具体的流程则如图4所示.
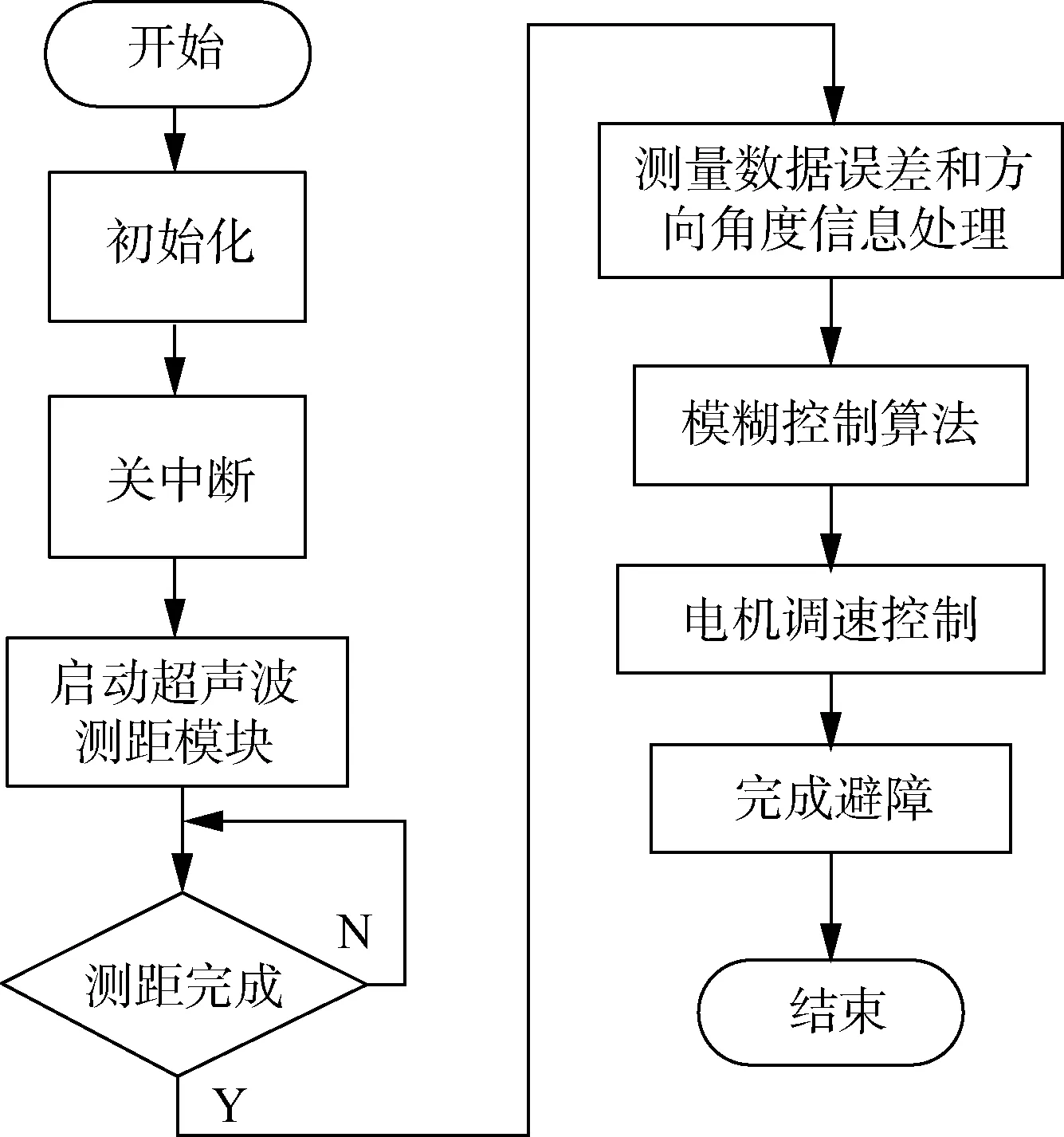
图4 系统主程序设计
3.2 超声波采集软件设计
在本文的超声波测距中,采用时间差Δt来表示脉冲信号发送和接收存在的时间差,同时结合超声波的速度,从而获得障碍物的距离.在本测距模块部分,采用参数为40 KHz 的电脉冲信号,然后通过传感器内部的谐振片将信号转换为可计算的数字,并在发射后等待接收信号.具体流程如图5所示.

图5 超声波采集流程设计
3.3 障碍物躲避算法设计
对智能小车的控制来讲,避障过程中最为关键的部分是要协调好小车行驶方向和速度,从而在设定的运行轨迹上能有效的避开障碍物,并以最佳的速度达到设定目标.对此,结合模糊控制的相关理论,本文从模糊控制器、模糊控制规则等对避障算法进行设计.
3.3.1模糊控制器设计
(1)传感器安装
为更好的获取小车周围的障碍物信息,本文从左、右、前三个角度对障碍物的距离进行测定,具体传感器部署安装如图6所示.

图6 超声波传感器安装部署
在角度采集范围测定中,以中轴线作为分界点,左右各45°,左边测定的角度在45°~180°,右边测定范围为-180°~-45°.
(2)模糊控制器设计
在以上三个方向测距中,如某范围内存在多个障碍物,那么系统会自动将距离较近的那个障碍物作为本文的输入量,如图障碍物的距离过远,超过了0.4 m,那么可直接忽略掉该障碍物.因此,模糊控制的输出的本质就是对方向的控制.

图7 模糊控制器设计
在以上的控制器中,将左、右、前三个方向的距离作为输入,然后通过模糊控制器对数据进行模糊化的处理,然后将距离信息转变为语言变量.对此,结合一般小车的档位情况,将前方障碍物的模糊化语言设定为:
d=[0,5]⟹Near
d=[5,20]⟹Far
d=[20,40]⟹Very Far
而左右障碍物的模糊化语言则设定为2档,即{Near,Far},分别对应的距离为[0,10],[10,40].
3.3.2模糊规则表建立
根据以上的设计,采用if-and-then对模糊规则表进行构建,从而可以得到表1的规则表.

表1 模糊规则表
4 系统测试与分析
4.1 仿真结果
为验证以上方法的可行性与正确性,本文通过仿真和现场测试的方式进行验证.在仿真测试中,设定智能小车的起始坐标和目标坐标.在本仿真测试中,设定小车的起始坐标为(20,0),目的坐标为(50,100)处,同时在运行路径中设定多个障碍,从而可以得到如图8所示的运动轨迹.
4.2 现场测试结果
同时在现场测试部分中,模拟小车的前方和左侧存在障碍物,从而可以得到如图9~11所示的小车障碍规避结果.
通过以上的转向可以看出,在通过模糊化的控制后,小车可及时调整运动方向,并及时躲避障碍物,进而验证本文构建的模糊算法的正确性和可行性.

图8 智能小车仿真运动轨迹

图9 检测到存在障碍物

图10 向右转90°
5 结束语
通过以上研究看出,模糊智能控制在小车障碍物躲避上具有一定的可行性,可实现小车对不同方向障碍物的精确躲避,从而为当前移动机器人的自动控制提供了一种借鉴.同时通过研究看出,模糊控制将具体的信息转换为模糊语言,并通过模糊语言实现了对小车方向的控制,在研究上具有其独特的特点,那就是在处理模糊化的变量中具有很强的优势.本文只是对转向的部分进行了研究,还需要对速度进行模糊化的控制,因此还有待以后作进一步的深入探讨.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
现代装饰(2020年7期)2020-07-27
科学(2020年3期)2020-01-06
电子制作(2019年16期)2019-09-27
电子制作(2017年7期)2017-06-05
商(2016年28期)2016-10-27
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01