
一种基于全站仪的跟踪雷达零位校准方法
2019-10-16 06:50李龙万军武斌
火控雷达技术 2019年3期
李 龙 万 军 武 斌
(中国兵器装备集团(成都)火控技术中心 成都 611731)
0 引言
精密跟踪雷达作为防空火控跟踪雷达,是近程火控防御系统的关键武器设备,是一种具有较高跟踪精度的单目标跟踪雷达,其主要任务就是提供目标精确的距离、方位和俯仰(R、A、E)坐标位置。随高新科技的发展,作为现代近程防空武器系统作战对象的各种高性能飞机及弹类攻击性武器也得到迅猛发展,对跟踪雷达的战术技术性能如稳定跟踪能力和测量精度提出了更高的要求。为精确提供目标位置信息(即高精度的距离、角度信息),跟踪雷达的轴系精度也需提高,才能为解算目标信息提供精确的基准。因此跟踪雷达总调过程中的轴系校准至关重要,其测试条件、调试过程、验收等各环节必须给予重视。随着武器安装平台的多样化,跟踪雷达天线安装形式也随之变化,轴系标校难度增加,操作性程度减弱,随着光学测量仪器精度的提高,利用高精度的全站仪对跟踪雷达天线俯仰零位进行校准,简化测量方法并且降低测量难度。通过某型号精密跟踪雷达的系统凋试过程验证了其实用性和有效性,经工程实践试验数据分析,证明此零位校准方法具有良好的工作效能。
1 跟踪雷达轴系组成
跟踪雷达天线经转接板安装在天线座方位-俯仰倒“π”字型支撑架上,保护天线的玻璃钢天线罩安装在天线前端。跟踪雷达天线安装状态如图1所示。跟踪雷达天线阵面机械轴的标校,其目的是要找出平面天线阵辐射面法线方向(即平面天线阵辐射法线的方位和俯仰零位值)。
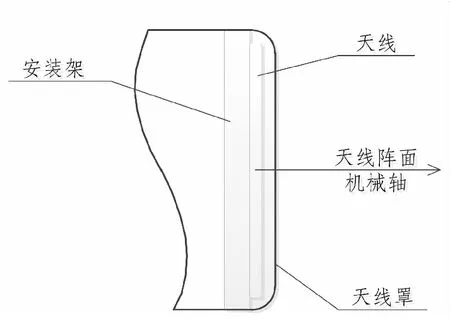
图1 跟踪雷达天线安装状态示意图
跟踪雷达的轴系[1-2](如图2所示)一般意义上包括光轴、电轴和机械轴。一般对光轴、电轴和机械轴的定义如下:
1)光轴:校靶镜中心与从校靶镜中观察到的十字分划中心所对准的远距离点之问的连线方向被称为天线的光轴(即校靶镜的视准轴),光轴的理想位置与电轴平行。
2)电轴:当跟踪雷达对点目标自动跟踪,目标误差信号等于零时(即天线精确对准目标的情况下),天线和被自动跟踪目标之间的假想连线被称为天线的电轴,电轴的理想位置应与机械轴重合。
3)机械轴:由天线系统机械元件决定的,位于与俯仰轴(天线俯仰转动的回转轴心线)垂直的平面内的设计计算电轴(即电轴的理想方向)。

图2 跟踪雷达轴系示意图
2 标校方法
2.1 标校要求
光轴是跟踪雷达的坐标(方位、俯仰)基准,光轴的理想位置与电轴平行,标校的目的实质上就是要保证跟踪雷达光轴、电轴和机械轴保持一致。根据近程火控防御武器系统的作战需要,要保证一定精度范围的轴系一致性,这就是跟踪雷达的标校精度要求。
跟踪雷达机械加工制造装配过程中,要先在天线座方位-俯仰倒“π”字型支撑架上安装一只校靶镜,天线座俯仰轴严格垂直于光轴。跟踪雷达校靶镜的俯仰轴在光电轴匹配校准过程中完成,校靶镜的方位轴利用光学方法校准,光轴标校后,不允许随意调整或使校靶镜受力。由于校靶镜的视准轴作为跟踪雷达的基准轴,光轴代表了跟踪雷达俯仰、方位坐标的基准,跟踪雷达系统调试过程中的标定、检查,要以光轴为基准。跟踪雷达出厂之前,轴系需经过严格的校准和检验。
2.2 全站仪组成
全站仪[3-4],即全站型电子测距仪,由测角、测距、数据处理、通讯、显示屏和电源等组成,是集距离、水平角、俯仰角、高程差测量功能于一体的高技术测绘仪器系统。与光学经纬仪相比,电子经纬仪为光电扫描度盘,能自动记录和显示读数,使测量操作简单化,可避免产生人为的读数误差。根据水平角、俯仰角测角精度,电子全站仪可分为0.1″、0.2″、0.5″、1″、2″和5″等几个等级。
2.3 测量原理
测量原理如图3所示,利用跟踪雷达的校靶镜和全站仪的望远镜。光轴(校靶镜)标校后,不允许随意调整或使校靶镜受力,校靶镜的视准轴作为跟踪雷达的基准轴。在跟踪雷达和全站仪都进行调平后,观测者利用跟踪雷达的校靶镜和全站仪的望远镜互相对瞄,当两观测者同时瞄准对方物镜的“+”中心点处,此时分别记录两者俯仰角读数,一个为跟踪雷达俯仰值Eradar(单位为mil),另一个为全站仪俯仰角值Etotalstation(单位为XX°XX′XX″)。若跟踪雷达俯仰零位(即跟踪雷达俯仰值为0mil)为大地坐标系下的绝对零位,则两者读数跟踪雷达俯仰值的绝对值|Eradar|和全站仪俯仰角值的绝对值|Etotalstation|之和应为90°,即为式(1)(读数要进行相应单位的换算)。

图3 测量原理示意图
(1)
3 标校步骤
3.1 光轴标校

1)跟踪雷达天线对准信号源信标喇叭时,理论上方位、俯仰的角误差值都应为0。首先要进行“找零点”,稳定跟踪伺服控制跟踪雷达天线对准标信号源信标喇叭,并保持当前角度不变,信标喇叭发出信标信号(与跟踪雷达工作频率相同的连续波)。
2)跟踪信号处理采集和、方位差和俯仰差通道间的中频信号,获取相位信息后自动完成相位修正标校。
3)跟踪信号处理加载标校得到的相位,稳定跟踪伺服控制跟踪雷达天线检查天线方向图、测角误差线性和测角误差极性是否正常。若不正常,则重复步骤1)~2)。
4)切换跟踪雷达工作的各个频点,重复步骤1)~3),遍历所有工作频点。
跟踪信号处理校相功能主要由斜率修正单元和相位校正单元实现,保证满足跟踪雷达测角精度的要求。斜率修正单元实质上就是一个系数可变的乘法器,其功能由DSP(数字信号处理器)完成;相位校正单元通过数字移相器对和信号进行相位修正。光轴标校后,不允许随意调整或使校靶镜受力,校靶镜的视准轴作为跟踪雷达的基准轴。
3.2 俯仰轴与零位夹角的测定
光轴标校后,需对跟踪雷达天线机械轴(方位和俯仰)零位基准进行测定和修正。机械轴方位零位[6]基准通常是以正北(大地基准点)为参照,测量出天线机械轴方位零位与正北的夹角,即可对方位零位进行修正。主要讲述利用全站仪对天线俯仰零位进行测定的过程,测定过程简述如下。
1)分别对跟踪雷达和全站都进行调平,两者相距100m左右。
2)利用跟踪雷达的校靶镜和全站仪的望远镜互相对瞄,当两观测者同时瞄准对方物镜的“+”中心点处,记录两者俯仰角读数(Eradar和Etotalstation),为消除人为读数误差,可重复进行3次。
3)为消除跟踪雷达调平带来水平误差,在跟踪雷达不同方位处(可均匀选择3个点位)重复步骤2)。
4)依据多组记录数据(Eradar和Etotalstation),经|Eradar|°+|Etotalstation|°=90°计算,即可得出俯仰轴与零位的夹角(需进行均值处理)。
以某部精密跟踪雷达试验数据(见表1)为例,进行俯仰轴与零位夹角的测定说明。
表1 跟踪雷达俯仰轴与零位夹角的测定试验数据
以点位A序号1的数据(Eradar=-2.920mil、Etotalstation=89°45′53″)为例,经计算Etotalstation-90°=89°45′53″-90°≈-3.921mil,则可得俯仰轴与零位的夹角为Eradar-(Etotalstation-90°)=1.013mil。
3.3 俯仰零位修正
俯仰零位修正,实质上就是要完成对俯仰零位的校准。俯仰轴与零位夹角测定后,若俯仰轴与零位的夹角不为0,则需对俯仰零位进行修正。以上述的某部精密跟踪雷达试验数据(见表1)为例,经计算可得俯仰轴与零位的夹角(见表2)。
表2 跟踪雷达俯仰轴与零位的夹角数据
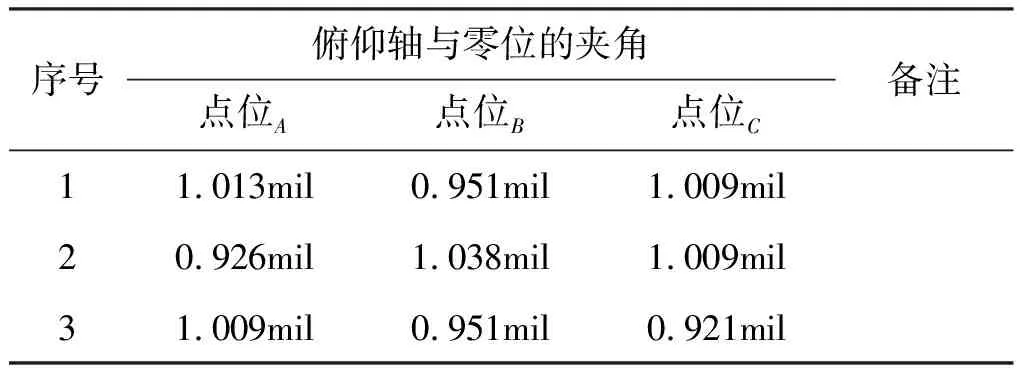
序号俯仰轴与零位的夹角点位A点位B点位C备注11.013mil0.951mil1.009mil20.926mil1.038mil1.009mil31.009mil0.951mil0.921mil
对此9组数据(见表2)进行均值计算得俯仰轴与零位的夹角为0.981mil。根据测试结果(均值计算的俯仰轴与零位夹角),可通过显控终端对俯仰零位进行修正。
俯仰零位修正后,可通过第3.2节“俯仰轴与零位夹角的测定”的步骤1)~4),对俯仰轴与零位的夹角进行复测,复测结果(即均值计算得到的俯仰轴与零位夹角的绝对值)应≤0.1mil。
4 结束语
跟踪雷达轴系的校准存在精度差、成本高等问题,对跟踪雷达系统至关重要,轴系校准的精度要求很高,但实际上又难以保证。本文提出的基于全站仪的精密跟踪雷达俯仰零位校准方法,已在某精密跟踪雷达产品的调试中使用,得到了实际的验证,尤其是在外场测量中更能体现出其简单、准确的特性,具有极大的现实应用价值。
猜你喜欢
仪表技术与传感器(2022年1期)2022-02-25
语数外学习·高中版上旬(2020年8期)2020-09-10
客车技术与研究(2019年5期)2019-10-24
航空维修与工程(2019年3期)2019-09-10
航天器环境工程(2019年3期)2019-07-01
新高考·高一数学(2019年1期)2019-04-15
中学生数理化(高中版.高一使用)(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
商情(2017年38期)2017-11-28
居业(2017年5期)2017-07-24
