
基于国产化计算平台的雷达数据融合软件设计与实现
2019-10-16 06:50李浩正
火控雷达技术 2019年3期
杨 璇 畅 言 李浩正
(西安电子工程研究所 西安 710100)
0 引言
近年来,随着高新技术的迅速发展和广泛应用,快速推动了武器装备的更新和作战方式的演变,信息化战争将成为未来战争的基本形态。随着我国综合实力的日益提高和我军信息化建设的稳步推进,研制和应用国产化计算平台已成为研究热点。
国产化计算平台是涵盖了国产硬件、操作系统以及其它基础软件的一个集合[1]。使用国产化信息平台不仅有助于消除我国电子国防的安全隐患,更有利于改变我国一直以来在信息安全领域的被动局面,符合国家安全和利益的战略选择,其重大意义不言而喻。
1 国产化计算平台
目前主流的国产计算机硬件主要是基于MIPS架构的龙芯系列和基于ARM架构的飞腾系列,国产操作系统主要有中标麒麟操作系统、深度操作系统、锐华(ReWorks)实时嵌入式操作系统、“道”实时嵌入式操作系统等。鉴于龙芯的生态环境比较完善以及锐华实时嵌入式操作系统对VxWorks的完美兼容,故本次国产化平台硬件选用龙芯系列,操作系统选择锐华操作系统。
1.1 硬件平台
龙芯3A-2000是龙芯3A多核处理器系列中最成熟的一款产品,采用65nm工艺制造,主频1GHz,功耗小于15W。可应用于通用服务器、云计算服务器、云存储服务器、高性能桌面等,可有效服务于大型信息处理、显示处理等实时系统。
龙芯3A处理器主要特征如下[2]:
1)片内集成4个64位的四发射超标量GS464高性能处理器核;
2)片内集成四核共享的4MB二级Cache;
3)片内集成2个64位400MHz的DDR2/3控制器;
4)片内集成2个16位800MHz的HyperTransport控制器;每个16位的HT端口可以拆分成两个8路的HT端口使用;
5)片内集成32位33MHz PCI/ PCIX;
6)片内集成一个LPC、两个UART、1个SPI、16路GPIO接口;
7)支持多核芯片通过HyperTransport接口互连;
8)高带宽设计,高可靠性设计,良好的可扩展性。
1.2 操作系统
锐华(ReWorks/ReDe)是我国自主研制的国产嵌入式实时操作系统,其符合IEEE POSIX 1003.13-2003/POSIX 1003.1-2001实时接口规范[3],并提供VxWorks兼容接口,其实时响应时间小于10μs;ReDe是与ReWorks相配套的、集嵌入式软件设计、开发、调试、仿真、测试和集成部署为一体的嵌入式软件开发环境。
1.3 锐华嵌入式实时操作系统(ReWorks/ReDe)主要构成
ReWorks嵌入式实时操作系统采用微内核及组件技术,能根据应用需要对操作系统内核进行配置、裁剪、扩展与定制,具备较强的伸缩能力[4]。ReWorks的体系结构图如图1所示。
ReDe以Eclipse开放体系结构为基础,结合嵌入式软件开发以及ReWorks操作系统的特点,实现了功能定制改造和工具链扩展,可支持与其它商用CASE工具的无缝集成,可以运行于Microsoft Windows和中标麒麟桌面操作系统等多种系统平台,具有开放性、跨平台、一体化等特点[4]。ReDe功能组成如图2所示。

图1 ReWorks体系结构图
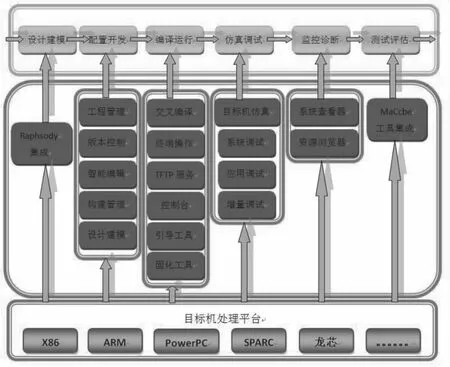
图2 ReDe体系结构图
1.4 锐华操作系统主要特点
锐华嵌入式实时操作系统采用全自主设计、自主实现,可替代国外同类先进产品VxWorks。主要特点如下:
1)高效的实时多任务管理,支持基于优先级的可抢占调度及防优先级反转策略;
2)支持SMP并行处理多核架构,编程接口与单核兼容,中断响应、任务响应时间、核心接口性能与VxWorks相当;
3)装备硬件环境适配:支持主流CPU,支持龙芯系列国产处理器,以实现SMP模式多核操作系统,支持龙芯3A国产处理器;支持多串口、USB设备;
4)具备系统监控、异常日志以及构件内存隔离保护功能,从而支持系统故障的记录、隔离、处理;
5)图形系统:高效的图像引擎,支持硬件加速及双屏显示,并实现与QT/GTK+图形系统的集成,实现多媒体播放器,支持H.264/MPEG格式;
6)支持与人大金仓、天熠数据库,CORBA实时中间件的集成。
1.5 ReWorks与国内其他操作系统基本情况对比
锐华与国内其他操作系统的基本情况对比见表1。
表1 锐华与国内其他操作系统对比表
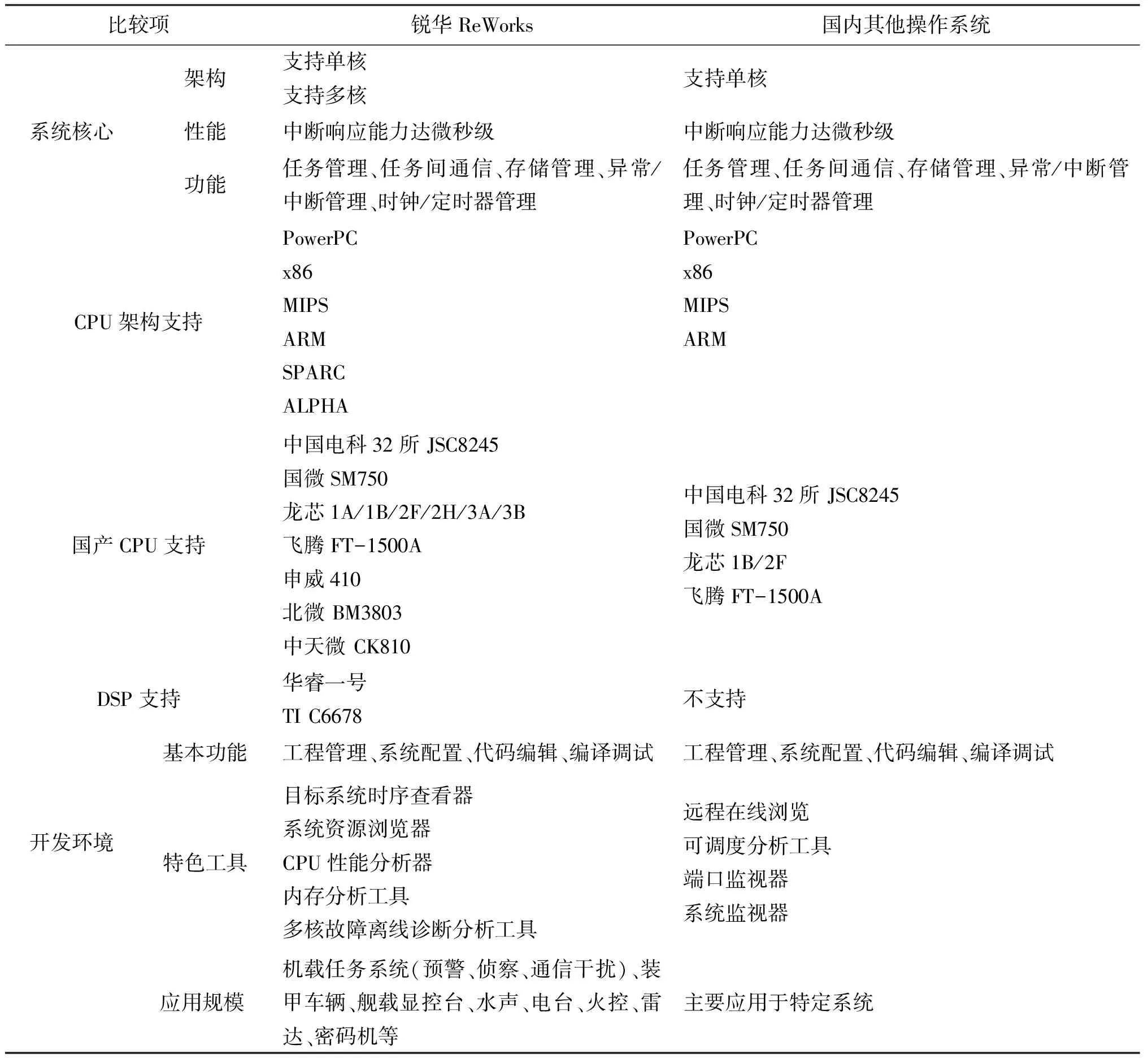
比较项锐华ReWorks国内其他操作系统系统核心架构支持单核支持多核支持单核性能中断响应能力达微秒级中断响应能力达微秒级功能任务管理、任务间通信、存储管理、异常/中断管理、时钟/定时器管理任务管理、任务间通信、存储管理、异常/中断管理、时钟/定时器管理CPU架构支持PowerPCx86MIPSARMSPARCALPHAPowerPCx86MIPSARM国产CPU支持中国电科32所 JSC8245国微SM750龙芯1A/1B/2F/2H/3A/3B飞腾FT-1500A申威410北微 BM3803中天微 CK810中国电科32所 JSC8245国微SM750龙芯1B/2F飞腾FT-1500ADSP支持华睿一号TI C6678不支持开发环境基本功能工程管理、系统配置、代码编辑、编译调试工程管理、系统配置、代码编辑、编译调试特色工具目标系统时序查看器系统资源浏览器CPU性能分析器内存分析工具多核故障离线诊断分析工具远程在线浏览可调度分析工具端口监视器系统监视器 应用规模机载任务系统(预警、侦察、通信干扰)、装甲车辆、舰载显控台、水声、电台、火控、雷达、密码机等主要应用于特定系统
由表1可看出,锐华操作系统产品在多核支持、国产CPU支持、DSP支持、应用范围等方面,具有一定的优势。
2 基于国产化平台的雷达数据融合设计实现
2.1 系统功能概述
雷达数据融合软件实时收集作战区域内各作战单元的战时空情信息,通过空间配准、时间配准、目标跟踪、融合状态估计实现作战情报信息融合,完成情报信息的一致性判别,形成战场统一的空情态势,为协同级指挥员决策提供依据。
2.2 软件设计与实现
雷达数据融合软件功能包括参数装订、空间配准、时间配准、目标跟踪、属性判断、类型识别、空情上报和状态上报功能。功能描述如表2所示。
表2 功能描述
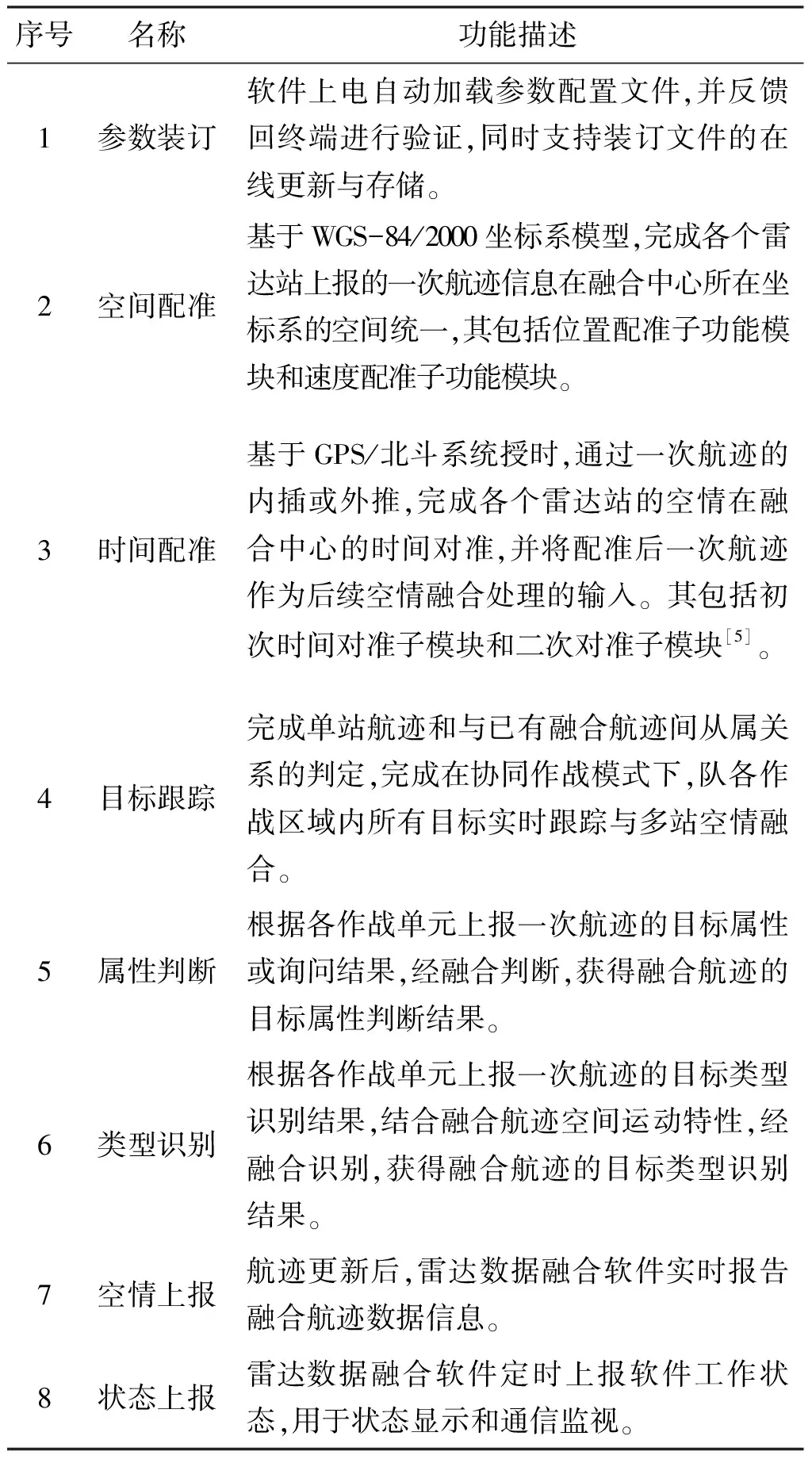
序号名称功能描述1参数装订软件上电自动加载参数配置文件,并反馈回终端进行验证,同时支持装订文件的在线更新与存储。2空间配准基于WGS-84/2000坐标系模型,完成各个雷达站上报的一次航迹信息在融合中心所在坐标系的空间统一,其包括位置配准子功能模块和速度配准子功能模块。3时间配准基于GPS/北斗系统授时,通过一次航迹的内插或外推,完成各个雷达站的空情在融合中心的时间对准,并将配准后一次航迹作为后续空情融合处理的输入。其包括初次时间对准子模块和二次对准子模块[5]。4目标跟踪完成单站航迹和与已有融合航迹间从属关系的判定,完成在协同作战模式下,队各作战区域内所有目标实时跟踪与多站空情融合。5属性判断根据各作战单元上报一次航迹的目标属性或询问结果,经融合判断,获得融合航迹的目标属性判断结果。6类型识别根据各作战单元上报一次航迹的目标类型识别结果,结合融合航迹空间运动特性,经融合识别,获得融合航迹的目标类型识别结果。7空情上报航迹更新后,雷达数据融合软件实时报告融合航迹数据信息。8状态上报雷达数据融合软件定时上报软件工作状态,用于状态显示和通信监视。
其性能指标如下:
1)空情收集能力
本车雷达空情 :1路;
上级空情:1路(可选);
2)从属作战空情:2路;
3)空情融合处理能力:500批;
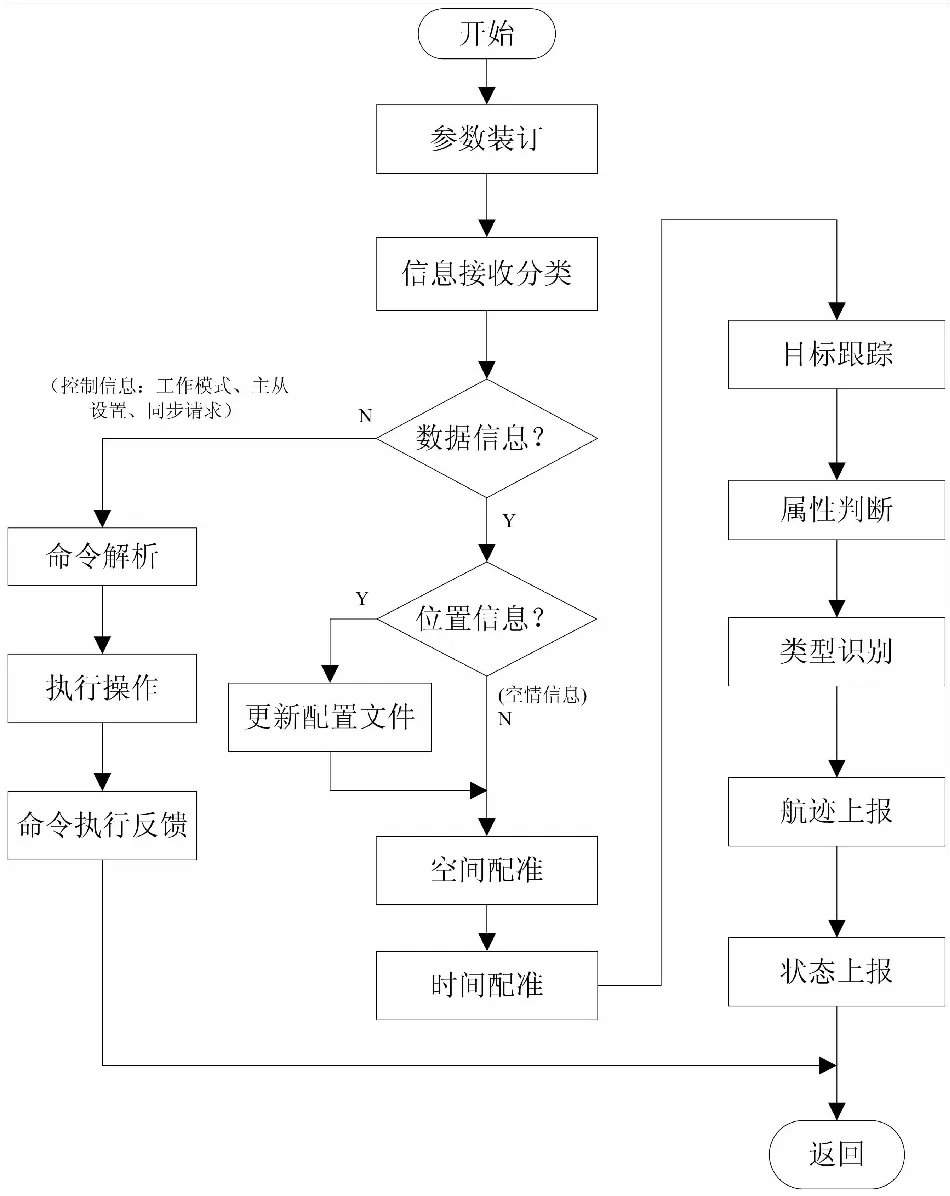
4)目标处理速度范围:30m/s 系统航迹精度:优于网内雷达航迹精度平均值(匀速直线运动)。 2.2.1 参数装订 数据融合软件上电自动加载参数配置文件,完成空间配置所需参数的装订,并将加载参数上报终端予以显示;同时,工作过程中,支持上述装订参数的在线更新和实时文件存储。 2.2.2 空间配准 空间配准功能用于完成各个雷达站上报的一次航迹信息的空间统一,并将空间配准后的一次航迹作为时间配准模块的信息输入。空间配准功能模块包括位置配准子功能模块和速度配准子功能模块。其中,位置配准功能完成将各个雷达站上报的一次航迹位置信息从各雷达站所在的相对坐标系转换到融合中心所在相对坐标系;速度配准把不同地点的各个雷达站送来的一次航迹矢量速度信息从各雷达站所在的相对坐标系转换到融合中心所在相对坐标系。 2.2.3 时间配准 时间配准功能基于GPS/北斗系统授时,通过一次航迹内插或外推,完成各个雷达站的空情在融合中心的时间对准。时间配准功能模块包括初次时间对准子功能模块和二次时间对准子功能模块。其中初次时间对准模块将融合航迹外推到当前一次航迹的时间,查找相关一次航迹,依据关联紧密程度,获取对应凝聚权值;二次时间对准模块将融合航迹相关的一次航迹按照各自速度进行外推至当前时刻,并把所有相关的一次航迹进行凝聚和存储。 2.2.4 目标跟踪 目标跟踪功能模块是信息综合软件的核心功能,完成单站航迹和与已有融合航迹间从属关系的判定,实现对协同作战模式下对作战区域内所有目标实时跟踪。其包括航迹建立、航迹批号管理、航迹相关、航迹更新、航迹质量管理子功能模块。 其中航迹建立模块查找作战区域内未相关的一次航迹,如果符合航迹建立准则,系统就自动完成航迹的建立。航迹批号管理模块对于新建立的融合航迹,当没有达到批号容量上限时,数据融合软件应能自动赋给该目标一个目标批号,在航迹撤销前,该目标批号唯一。航迹相关模块完成凝聚点迹和已有融合航迹间从属关系的判定,建立凝聚点迹与融合航迹的配对矩阵,并通过计算选取最优的凝聚点迹作为融合航迹的更新点迹。航迹更新模块依据融合航迹更新点迹和融合航迹预测估计值,通过滤波处理,给出目标位置和速度估计,及时更新融合航迹数据,保证对融合航迹的有效跟踪维持。通过航迹质量管理判断哪些未确认航迹可以转换为确认航迹,哪些是虚假航迹应予以撤消。 2.2.5 属性判断 根据各作战单元上报一次航迹的目标属性或询问结果,经融合判断,获得融合航迹的目标属性判断结果。目标属性融合结果为敌、我、不明、民航四种,其中“敌”只能由人工指定。实际设计中,首先应服从上级以及人工对该目标的敌我识别结果;如果没有明确的识别结果,则利用各站上报航迹信息中的识别结果进行敌我识别综合判断。 2.2.6 类型识别 根据各作战单元上报一次航迹的目标类型识别结果,结合融合航迹空间运动特性,经融合识别,获得融合航迹的目标类型识别结果。在这些因素中,对于上级给定或操作手指定的目标类型,要无条件服从;若无上级相关信息,则根据位置、运动特性、综合判断目标类型识别结果,最后将识别结果随航迹一同上报。 2.2.7 航迹上报 当融合航迹更新结束后,记录融合航迹更新数据信息,并完成融合航迹信息的反量化和上报。 2.2.8 状态上报 定时收集数据融合软件状态,包括系统工作模式、本站编号、主从状态、融合航迹数量等;并将状态信息量化后,通过网络定时上报。 本次设计采用分布式融合架构,主要完成协同作战时多站的数据融合,兼顾目标属性判断和类型识别。雷达数据融合软件的工作流程图如图3所示,主要工作流程如下: 1)软件上电自动加载参数配置文件,完成空间配置所需参数的装订; 2)根据网络接收的数据类型进行分类存储,判断信息为数据信息还是控制信息; 3)若接收到控制信息,根据协议对控制信息进行解析并执行,并将执行结果实时反馈; 4)若接收到数据信息,则需判断是位置信息还是空情信息,若为位置信息,则调用参数装订模块进行位置信息更新;若是空情信息,则进入后续模块处理; 5)当有空情信息输入时,首先调用空间配准模块完成一次航迹信息的空间统一;其次调用时间配准模块完成各个雷达站的空情在融合中心的时间对准; 6)对经过空间配准与时间配准的一次航迹进行目标跟踪处理,完成在协同作战模式下,队各作战区域内所有目标实时跟踪与多站空情融合; 7)根据各作战单元上报一次航迹的目标属性或询问结果,调用属性判断模块,获得融合航迹的目标属性判断结果; 8)根据各作战单元上报一次航迹的目标类型识别结果,结合融合航迹空间运动特性,经融合识别,获得融合航迹的目标类型识别结果; 9)最后,雷达数据融合软件定时上报融合航迹数据信息与状态信息。 图3 雷达数据融合软件的工作流程图 根据对雷达数据融合软件需求分析,结合ReWorks嵌入式实时操作系统实际使用特点,利用集成开发环境(ReDe)完成雷达数据融合软件的设计实现,具体实现方法如下: 1)为了使软件具有良好的兼容性,在系统资源配置中选择VxWorks兼容层的全部内容; 2)由于ReWorks中的头文件路径为绝对路径,故在创建工程时需将头文件路径加入路径与符号选项中; 3)自旋锁锁住资源而非锁住任务调度,因此不能使用tasklock与taskUnlock,应在程序中具体临界资源处添加自旋锁spinlock_t datapro; 4)由于ReWorks与VxWorks辅助时钟函数的差异,在ReWorks操作系统中用函数sys_auxclk_rateset、sys_auxclk_connect、sys_auxclk_enable来适配辅助时钟; 5)系统默认未加载浮点处理,若工程需要,则要勾选支持浮点处理的选项; 6)导入融合软件源程序,并在usrInit文件中加入主函数完成编译。 利用上述设计方法在实验室进行动态仿真,图4为该雷达数据融合软件航迹融合处理效果。仿真结果表明,该雷达数据融合软件各个模块功能正确,实现对协同作战模式下对作战区域内所有目标的实时跟踪和空情融合,满足雷达数据融合对功能和性能的指标要求,能够替代国外的计算机硬件和操作系统。 图4 雷达数据融合软件航迹融合处理效果 本文通过对软件国产化必要性的分析,介绍了国产化平台的特点及性能,结合从事的雷达数据融合工作,设计了能够在国产化平台下运行的雷达数据融合软件,为数据融合系统的国产化提供了解决方案,降低了部分军用产品过分依赖国外厂商带来的隐患,具有较高的军事价值和经济价值。2.3 工作流程
2.4 软件优化适配
2.5 仿真分析


3 结束语
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
雷达科学与技术(2020年4期)2020-09-11
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(高年级)(2016年11期)2016-11-14
华人时刊(2016年13期)2016-04-05
