
考虑并线的网联车辆巡航控制研究*
2019-10-10 01:15:34张旭东刘献韬王文伟
汽车工程 2019年9期
张 涛,邹 渊,张旭东,刘献韬,王文伟
(1.北京理工大学机械与车辆学院,北京 100081; 2.北京电动车辆协同创新中心,北京 100081)
前言
自适应巡航控制(ACC)[1]作为重要的辅助驾驶方式之一,受到越来越多的研究与改进,通过在传统ACC系统的基础上增加车间通信(V2V)设备[2]来获取周边车辆信息,并构建网联协同控制车队,被称为协同自适应巡航控制(CACC),能够有效提升交通流通性[3]。与传统ACC相比,CACC由于能够通过无线通信直接获取头车的速度与加速度信息,可确保车队实现快速跟车响应。由于CACC系统通常用于固定的车队,且需要指定头车进行集中协同控制,因此不易于推广到更广泛的驾驶方式中。文献[4]中提出网联巡航控制(CCC)可不用局限于固定的车队进行网联巡航控制,每辆车作为独立的分布式控制单元,与周围网联车辆进行通信并获取前方与远方车辆的信息,根据延时与通信拓扑结构进行规划跟车状态。因此,网联巡航控制(CCC)不仅可实现更快的控制响应,更易于推广到常规交通中应用,且研究表明其在提高道路通行效率和安全性具有很大的潜力[5]。为了提高传统CCC系统多场景下的适应性,在针对实际高速道路上易于出现旁车并线进入车队的问题,研究一种更安全、响应更快速且易于设计与控制的分布式CCC系统是非常必要的。
针对网联巡航控制车辆,国内外研究机构已开展研究,并取得一些研究成果。文献[6]中基于前馈与反馈构建了网联巡航控制系统,仿真与实车对比了ACC与CCC的跟车效果,验证了CCC能够在更短的跟车间距下保证队列行驶的稳定性;文献[7]中基于线性控制算法以及模型预测控制算法(MPC)设计网联巡航控制策略,但并未涉及底层驱动机构的模型设计与控制;文献[8]中基于滑模控制提出前后两车协同主动避撞算法,但并未考虑旁车入列时的避障问题;文献[9]中提出基于模糊支持向量机算法构造旁车并线意图识别器,进而提升主车的行驶安全性,由于识别结果与训练样本有关,因此识别准确度不能保证;文献[10]~文献[12]中详细分析了驱动延迟、通信延迟和增益参数对队列网联巡航控制稳定性的影响,对比了不同的通信拓扑结构下的车辆稳定控制参数取值范围,但多数仿真前提条件过于理想化,且并未进行实车验证,不宜在真实交通中推广;文献[13]中分析了自动驾驶车辆间的并线协同控制方式,并未考虑并线过程对主车的影响。目前关于智能车辆的技术研究,多集中在跟车的稳定性和预测控制上,而对多变环境的适应性研究拓展比较小,特别是换道车辆干扰主车安全行驶的问题有待深入研究。
本文中设计了分布式应用的分层CCC网联巡航控制系统,并提出一种考虑旁车并线行为的跟车策略,保证在复杂行驶条件下,针对任何旁车道车辆并线进入主车道的行为,均可以进行目标识别并制定适当的跟车距离,进而提升网联车辆的行驶主动安全性和系统环境适应性。
1 网联巡航控制器系统设计
网联巡航队列如图1所示,在任意相邻两车跟随系统中,当第i辆车作为主车时,第i+1车为其前车。通常,σ表示车间通信延时,是由于通信间歇性和数据包组丢失引起,通信频率一般为10 Hz,通常取平均通信周期0.15 s;τ为传感器驱动延时,一般为0.1~0.3 s,是由于目标识别系统到执行器的响应耗时引起,执行器的响应一般可表征为1阶惯性延迟环节[14],本文中为简化传递链模型,取特定延时τ≈0.3 s。d和v为前后两车间的纵向相对车距和车速,一般通过前向目标识别系统测得;a为前车加速度,通过V2V通信获取。
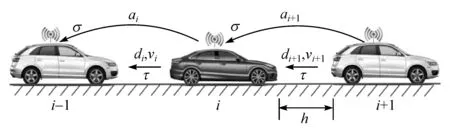
图1 车辆网联巡航行驶示意图
本文中构建了一个涵盖感知-决策-控制的分布式分层控制系统,如图2所示。图中:vsx,vsy分别表示旁车的横向、纵向速度;lsy表示旁车与主车的横向距离;h0,1和 h0,side表示相应的两车纵向距离;感知层用于测量周围车辆的相对距离和速度,V2V用于接收周围车辆的加速度信息;旁车状态模块用于区分旁车与前车;跟车策略生成模块决定是改变当前正在执行的跟车策略,并将最终决策发送至跟踪目标生成模块;跟踪目标生成模块计算产生当前跟车策略下的期望车速、跟车间距;CCC控制器计算获得主车期望加速度,进行查表输出驱动与制动信号。

图2 分布式网联车辆分层控制系统
1.1 跟车策略
网联车辆跟车策略的目标是引导主车与前车保持相对的安全距离与车速,常用跟车距离模型为:固定跟车距离模型、固定跟车时距模型和非线性间距模型等[15-17],本文中参考固定跟车时距模型,跟车距离-速度策略如下:
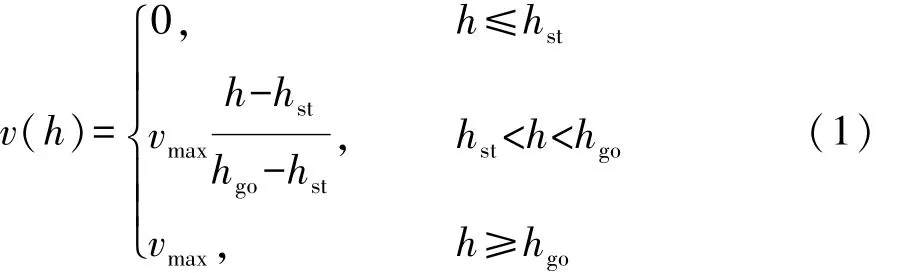
式中v(h)为对应当前车距h时的主车期望车速,m/s。无旁车时,主车与前车的间距 h=h0,1,h∈[0,∞),单位为 m,固定车间时距为 th=(hgo-hst)/vmax。
式(1)对应的距离策略如图3所示。当h<hst时,主车期望车速降为0,hst即为停车距离;当h>hgo时,主车期望车速到达最大值vmax,主车不再继续加速跟随,确保了队列中行驶车辆的安全性。
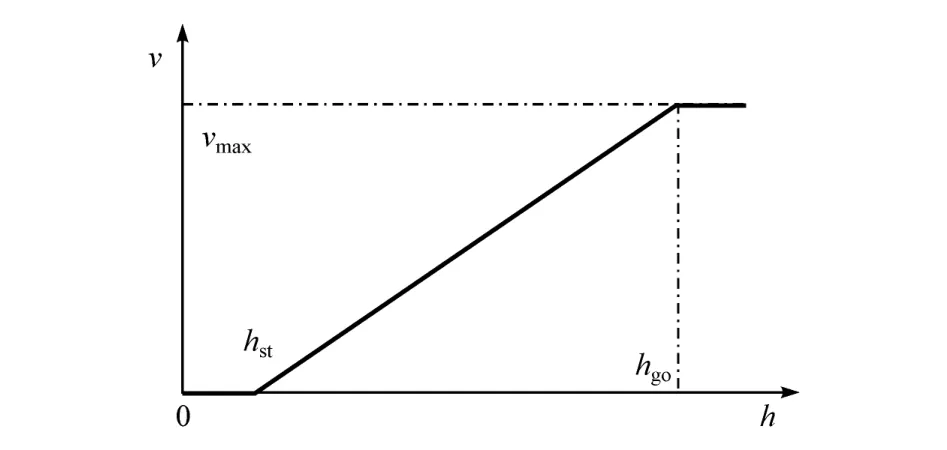
图3 跟车速度与跟车距离关系
本文中设定 hst=5 m,hgo=35 m,vmax=30 m/s,根据式(1)可知,60 km/h的跟车速度下,车间距离达到22 m,足够一些激进驾驶员进行并线操作。一般在换道轨迹中间处,旁车纵向速度接近于前车速度,且横向移动速度波动不会太大,可认为vsy为定值。研究指出,超过99.7%的车辆会在12 s内完成换道[18],而国内普通高速公路单车道宽度为3.75 m,横向移动速度一般小于1 m/s。当车辆并入主车道后突然被识别为新的跟踪目标,主车往往会紧急制动来保证安全的跟车距离,易引发后续车辆的危险碰撞行为。因此,主车的跟车距离 h=h(0,1)应该不仅考虑主车与前车之间的纵向距离h0,1,同时还考虑主车与旁车的纵向距离h0,side,如式(2)所示,其中系数λ为旁车纵向距离参考权重;式(3)用于计算并线瞬时剩余时间;式(4)用于将时间参数平滑处理,并映射为相应的无纲量权重系数λ。
h(0,1)(t)=λh0,side(t)+(1-λ)h0,1(t) (2)
为了提高目标识别的有效性,在模式识别中对式(3)添加如下约束:
(1)权重系数最大为1,即Ts的计算值应限制在1 s内;规定横向1 m的判断区间,即当主车与旁车的横向距离超过1 m时,不进行旁车行为预判,令Ts=1 s(对应 λ为 0,此时 h(0,1)=h0,1);
(2)当vsy≤0时,即旁车横向相对静止或横向远离主车时,令Ts=1 s(对应λ为0);
(3)当lsy<0时,即旁车已经部分驶入主车行驶路径范围内,此时可认为旁车真实发生了并线行为,系统需要将旁车更新为新的前车目标。
权重系数λ并不是用来鉴定旁车并线行为,而是将旁车并线的趋势转化为参考量。图4(a)为旁车横向匀速移动到主车车道过程中各参数变化,通过式(4)可将时间参数转为旁车参考权重系数λ;图4(b)显示旁车在横向近距离lsy处左右晃动时的参数变化,从系数λ可以看出,式(4)对旁车横向低速扰动具有一定的平滑处理作用。

图4 旁车并线过程中权重系数的变化
1.2 网联巡航CCC控制器
车辆动力系统是一个复杂的非线性系统,在CCC控制器的设计中,忽略基于物理模型中的空气阻力和滚动阻力,结合测量与网联通信接收到的前方车辆行驶参数,以及考虑到通信延迟、传感器驱动延时和旁车道车辆,主车加速度·v(t)由 CCC0控制器直接确定:

式中:z·0(t)为在当前跟车距离策略下的主车期望车速与实际车速的偏差为主车与前车的速度偏差;为通过无线通信获得的前车加速度;α,β,γ分别为各项增益参数。
前车以稳定速度v*行驶时,CCC控制器将逐渐调整主车状态,获得理想的跟车速度与跟车距离平衡v*=v(h*)。在平衡状态下,定义前车的平衡速度扰动:

代入式(5)可转化为如下扰动形式:

式中f*=v·(h*)且车间时距th=1/f*,根据式(7)的定义,令前车的速度扰动 v~1(t)作为输入,主车的速度扰动v~0(t)为输出,建立车辆头尾扰动传递函数,并进行拉普拉斯变换,得到:

在下文中,假设前车的自身传感器稳定可靠,重点分析主车控制器在不同参数下的稳定性。
2 CCC控制器线性稳定性分析
网联巡航队列的稳定性一般包括两方面:个体车辆稳定性(plant stability)和车辆队列的稳定性(string stability)。个体车辆稳定性指主车能够达到与前车相同的稳定速度;队列稳定性是指前车的速度波动可在向后传递过程中被主车衰减,确保整个车队不会出现放大的速度波动。根据文献[12]可知,个体车辆稳定性是由式(8)传递函数的分母决定,即当且仅当特征方程:

所有解都位于复平面的左半平面上,系统才是稳定的。令 s=jΩ,Ω≥0,代入式(9)特征方程,化简将实部与虚部分开:

得到如下稳定边界形式:

由式(9)可看出,加速度反馈信号并不影响个体车辆稳定性,式(11)稳定性边界内的参数可确保系统稳定。
由于扰动信号可使用傅里叶分量来表示,并且叠加适用于线性系统,因此当针对所有激励频率的正弦扰动信号在前车与主车之间传递并衰减时,可确保头尾车辆的列稳定性,其稳定必要条件如下:

在头尾稳定性区间边界上,存在某一频率的扰动信号,使|Γ0,1(jω)|=1且满足:

由式(8)、式(12)和式(13)可看出,列稳定与参数 α,β,γ,τ,σ,f*都有关系。使用 Matlab求解式(13),并绘制稳定图。
取 σ=0.15 s,τ=0.3 s,γ=0.5,且 th=1/f*=1 s,使用 Matlab绘制式(11)和式(13)的数值解,得到(α,β)的稳定性图谱,如图5所示。

图5 系统参数稳定性图谱和传递函数伯德图幅值
个体稳定性边界如图5(a)中深黑线所示,由浅灰色和深灰色区域共同组成;列稳定性边界如图5(a)中的灰线所示,由深灰色区域组成;在深灰色区域之外的参数将导致式(8)在某些频率范围时具有大于1的幅值,即扰动传递被放大。取图5(a)中A~F点所对应的参数,绘制传递函数伯德图所对应的幅值图,如图5(b)所示,由图中可以看出:A,B和F点参数对应的传递函数幅值最大值均大于1,且A和B点在高频扰动处出现不稳定性,F点在低频处(ω→0)出现不稳定性;C和E两点参数均处于临界稳定边界上,其对应传递函数幅值最大为1,其中E点在为低频临界点;D点参数在列稳定区域内,系统稳定。
车辆的驱动延时一般较为固定,而通信延时可能随时间变化而变化,其对主车的稳定性影响主要表征为时变的延时值差异较大。进一步,绘制不同的驱动延时与通信延时下的(σ,β)稳定性图谱,如图6所示。结果表明:随τ和σ的增大,列稳定性参数区域逐渐变小;当 τ=0.3 s时,通信延时超过0.8 s的控制器已经无法保证列稳定性。即CCC控制器存在一定的通信延时,仍旧可确保队列稳定性。

图6 不同延时值下的系统稳定性图谱
由上可知,针对系统存在的不同延时,可通过合理选择控制器各项系数值大小,确保网联车队的系统稳定性。在Matlab/Simulink中建立4车的网联巡航控制车队模型,前车速度波动 v~(t)=5sin(0.5πt),单位 km/h,由于真实车辆加速度有限,且过大的加速度变化值影响乘车的舒适性,取相对较小的增益系数进行仿真,令α=0.7,β=0.5,τ=0.3 s,σ=0.15 s,f*=1,仿真结果如图7所示。结果表明,在同样控制参数下,不存在加速度反馈时,队列速度波动被放大,从图7(b)中可以看出,CCC系统中,存在加速度反馈时,每辆车都表现出了较好的跟车响应,而且速度波动呈现衰减趋势,确保了队列行驶的稳定性。
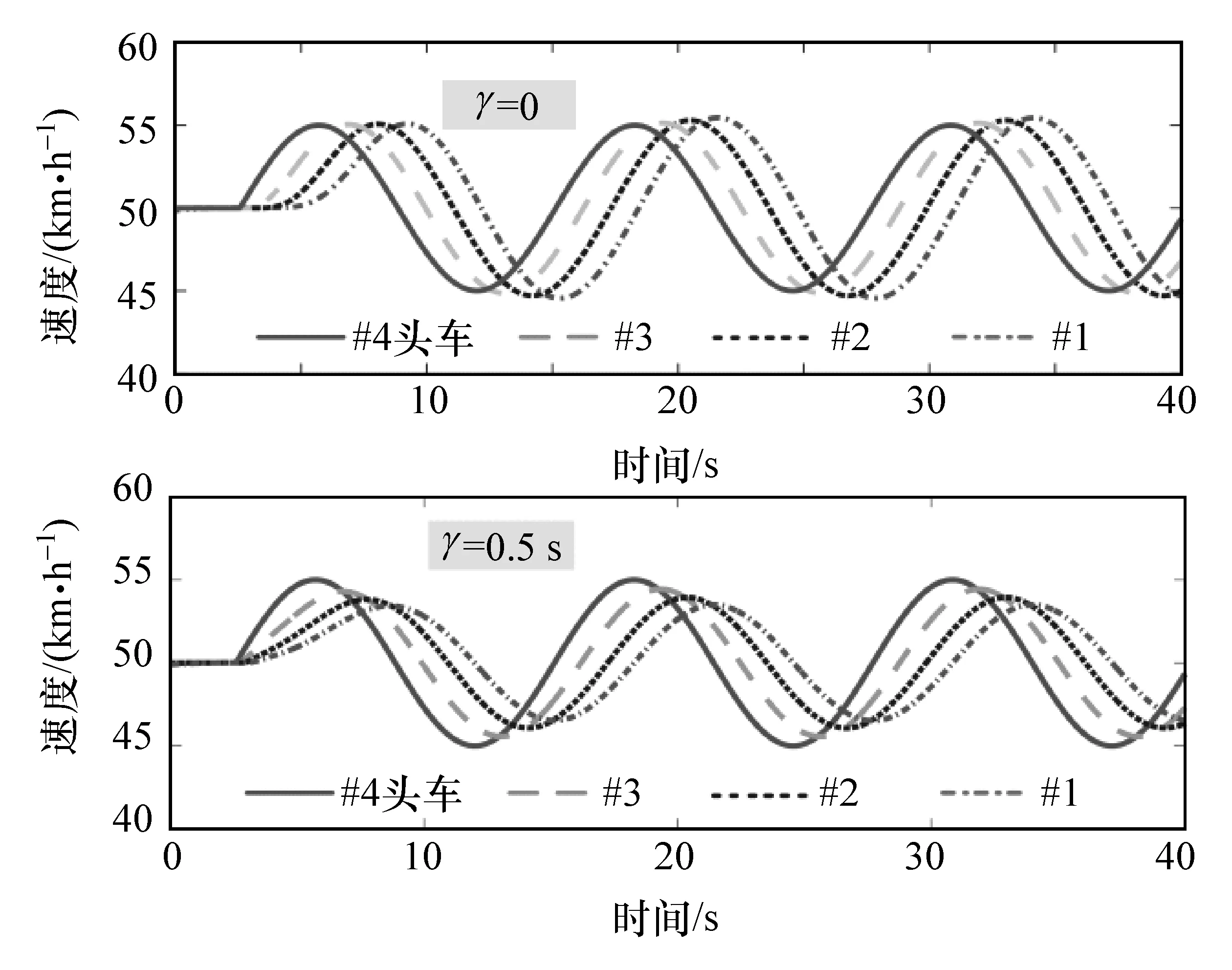
图7 网联队列跟车仿真速度曲线
由于CCC系统中每辆车均可采用相同的控制与跟车策略,且设定主车只接收其前车的加速度信号,更远处车辆的状态对所讨论的主车没有直接的影响,故后续只需讨论连续两车的跟车行驶状态即可。下文中建立两种跟车并线试验,一种是针对式(2)动态跟车策略的跟车仿真M1,一种是不考虑旁车并线过程的跟车仿真M2。两种仿真中,所有车辆均以20 m/s的速度匀速行驶,且旁车在主车前向17 m处以0.3 m/s的横向速度移动到主车与前车的间隙中,其中 α,β,γ,τ,σ,f*参数值与图 7(b)相同;在计算过程中将Ts放大1.5倍以延长预判时间至1.5 s,在M2中,只有旁车与主车的横向距离lsy<0时,主车才更新的跟踪目标。
主车的动力学响应仿真曲线如图8所示,图中左侧虚线代表主车开始考虑旁车影响的时刻点,右侧虚线代表旁车横向移动到主车正前方范围内(lsy<0)的时刻点,两虚线的间隔时间为1.5 s。图8(a)中实线表示旁车参考权重系数的变化。图8(b)表示主车与旁车间的纵向距离,从图中可以看到,两种仿真下,主车与旁车的纵向距离均达到安全距离25 m,在第5.3 s,与M2相比,M1的主车与旁车的纵向距离已经增加2 m以上。图8(c)表示主车的加速度,从图中深色黑线可以看出,突然出现的新目标会导致主车紧急制动,加速度变化幅度较大,影响乘坐舒适性,而紧急制动行为会严重影响交通安全性与交通流通性,相比较策略(2)下的主车加速度,由于提前进行缓慢制动而没有出现紧急制动,加速度变化较为平滑。图8(d)为主车的速度波动图,从图中可以看出,策略(2)下的主车速度波动更小,更有利于车队的稳定性。综上可知,考虑旁车并线过程的跟车策略可以使主车的跟车响应更早、更快、更安全,有利于提升车队的交通安全性。
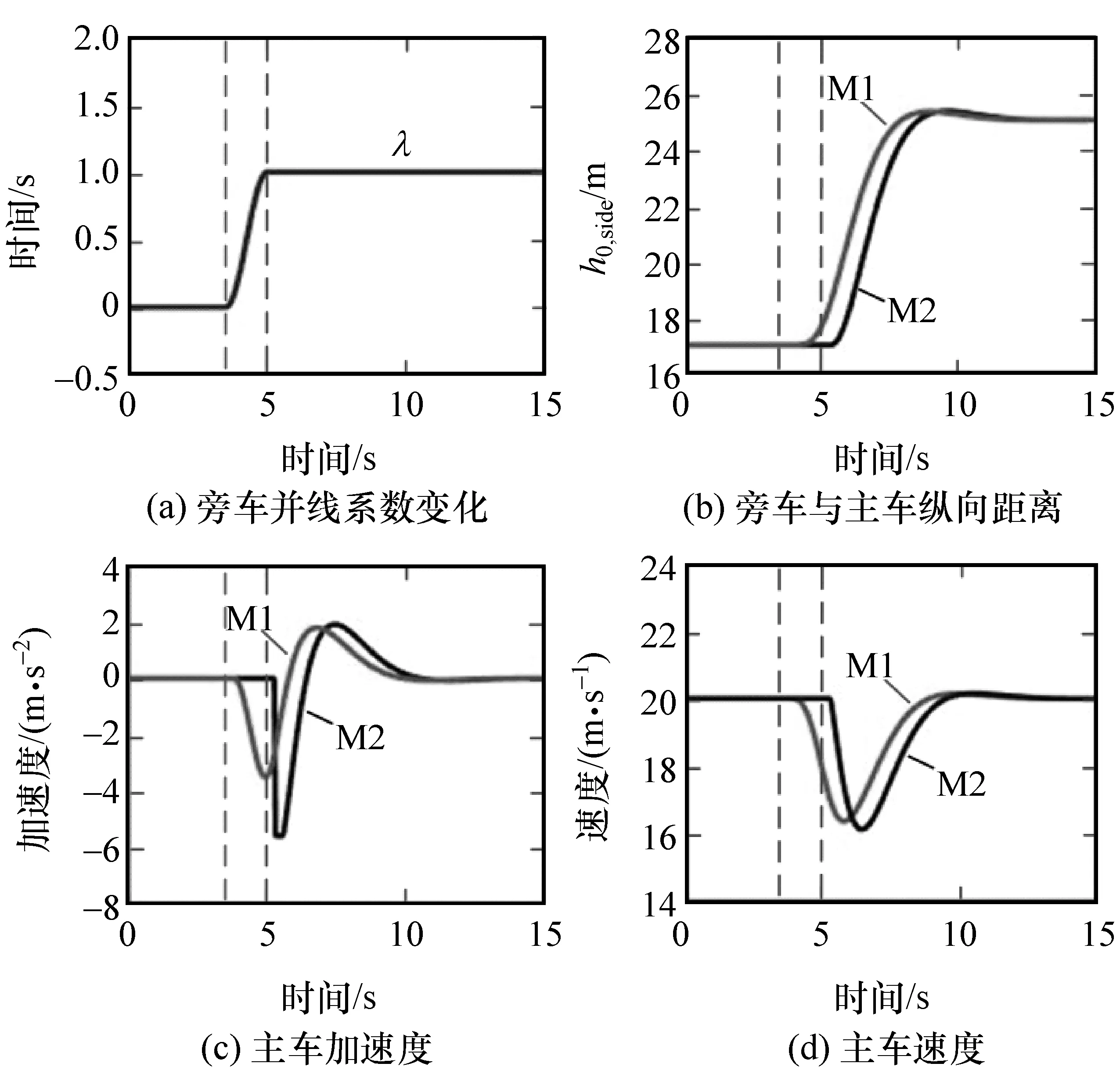
图8 主车动力学响应仿真结果
3 CCC平台搭建与实车验证
3.1 试验平台搭建
试验平台如图9所示,主车以北汽EU260纯电动汽车为基础,并针对其驱动与制动单元进行电控化改装:加速度指令转为对应加速踏板电压信号;制动指令转为制动压力信号,发送给电子真空助力器(EVB)来控制原车制动缸产生制动压力;车间通信系统使用Cohda MK5的无线通信模块,最大无障碍通信距离达到300 m;定位系统采用NAV982 GNSS导航仪,可准确收集实时地理位置、速度、加速度、航向角和制动状态等;车载 CCC主控制器采用dSPACE作为实时控制系统,支持在Matlab/Simulink编译环境下的模型自动生成代码和下载,通过上位机ControlDesk可实现可视化的数据显示与在线调参、存储,方便试验调试。
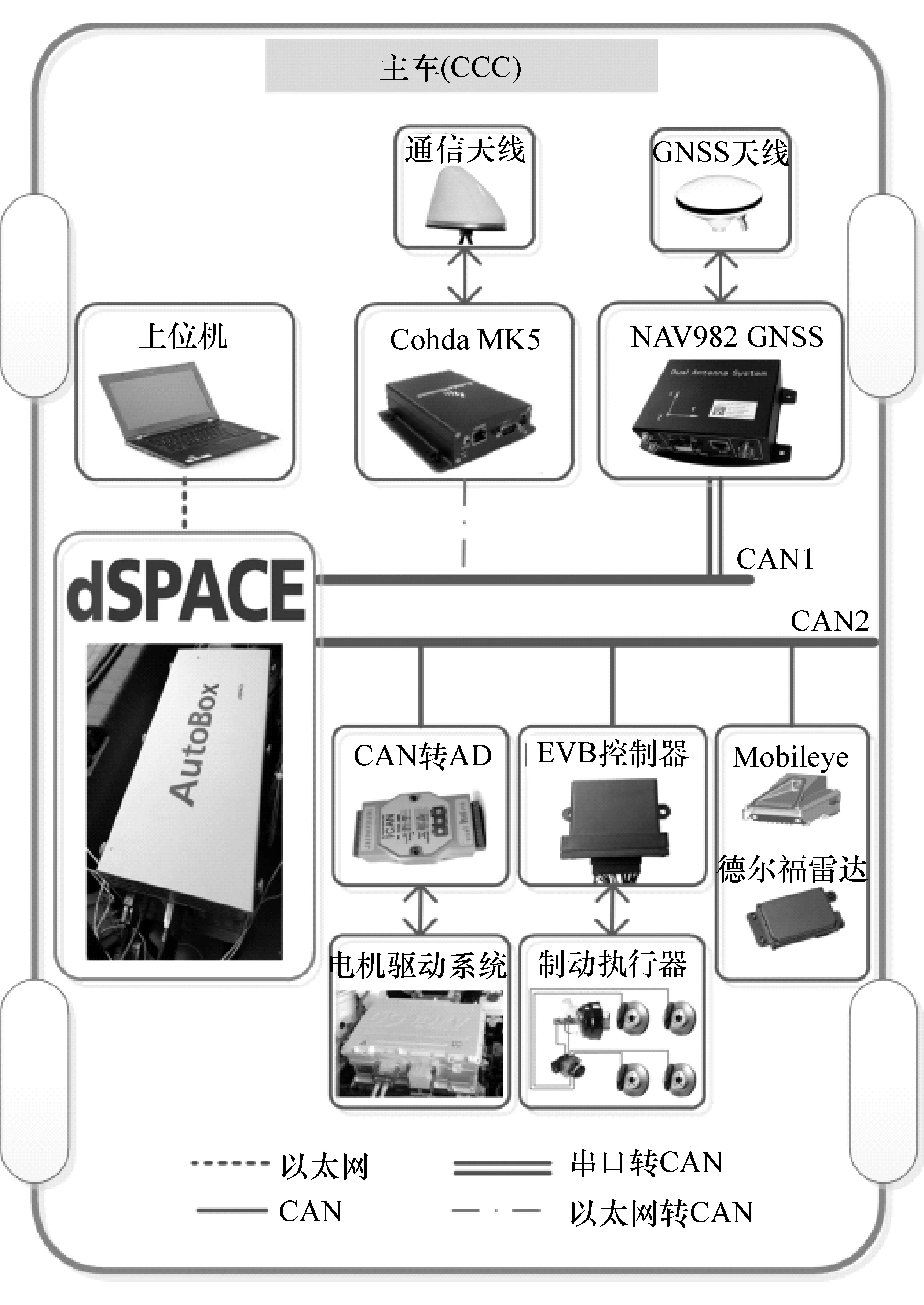
图9 CCC车辆试验平台架构
车辆前向目标识别系统采用Mobileye摄像头与德尔福毫米波雷达融合解决方案,可准确识别出15个前向目标。由于采集到的目标为原始连续散点目标,采用文献[19]中使用的门限值法和连续滑窗检测,确定道路内车辆目标的有效性。图10(a)中框内的车辆为监控的目标车辆,图10(b)为滤波处理后的相对纵向、横向距离。从图中可以看出,随着目标车辆的右转换道,测量计算得到的相对横向距离逐渐变大。由于纵向跟车测试距离较近,目标车辆在横向距离2.5 m时逐渐消失在视野内,视野边缘处视觉系统测量偏向角有偏差,导致横向距离计算有误差。考虑到本文中跟车策略只考虑车辆边沿1 m内的横向距离,可认为前向目标识别系统能够准确测量出目标与主车的相对距离,且经过滤波后的距离值更加准确。

图10 目标车辆横向移动过程的测试效果
3.2 实车试验
在网联车辆实车试验中,为简化电机、减速器、轮胎和风阻等非线性影响,将车辆动力学响应特性简化为逆动力学模型,通过标定实车的真实加速踏板行程-转矩-车速曲线,并根据式(14)需求转矩公式逆推车辆的加速度。

式中:r为车轮半径;i为传动系减速比;m为整备质量;f为滚动阻力系数;CD为风阻系数;A为车辆正投影面积;δ为车辆旋转质量换算系数。通过实车试验测得不同加速踏板开度下,电机转矩-转速关系曲线如图11(a)所示,a为加速踏板行程值;测得不同车速下,不同制动压力值所产生的制动减速度,如图 11(b)所示。

图11 加速度与控制指令的关系曲线图
为了避免主动加速度与带挡滑行加速度冲突以及防止频繁加减速切换,测试了车辆带挡滑行加速度,并对实测数据拟合后近似得到一个线性表达式:
as=-0.029v+0.174 (15)
式中:as为基准加速度,m/s2;v为车速,km/h。适当放宽车辆匀速时的加速度控制区间,在基准加速度上下设置切换边界,如图12所示。
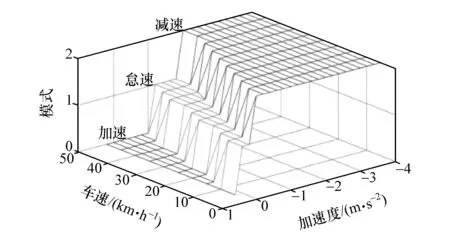
图12 加速度模式切换图
进行最小两车行驶队列的跟车试验,并加入第3辆车作为旁车。试验场景如图13所示,车辆都拥有网联通信的能力,但只有主车作为被控对象,前车为人类驾驶。取 α=0.7,β=0.5,τ=0.3 s,σ=0.15 s,f*=1;由于实车对比试验中无法精准复现旁车的行为,因此在实际并线试验中,使用数学模型来模拟旁车的并线过程,旁车与主车纵向距离为12 m。

图13 实车队列行驶试验场景
实车试验场景设置如下:(1)无旁车,γ=0,前车自由行驶,主车跟随效果如图14(a);(2)无旁车,γ=0.5 s,前车自由行驶,主车跟随效果如图14(b);(3)有旁车,前车匀速行驶,针对是否考虑旁车并线的行为,试验并观察两种情况下主车的速度变化,结果如图 14(c)所示。
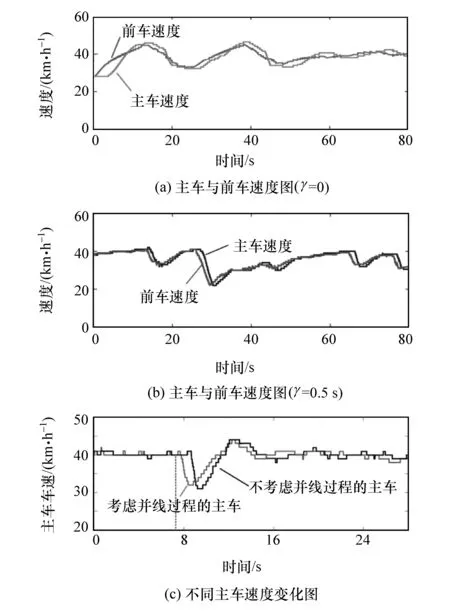
图14 不同场景下的实车试验结果
对比图14(a)与图 14(b)可以看到:不管是否有加速度反馈,均能保证个体车辆稳定,主车达到前车的平衡速度;但不考虑前车加速度反馈时,主车速度波动放大,无法保证队列稳定性,考虑前车加速度信息时,主车能够快速响应前车的速度变化,并保持车速的一致性,降低速度波动的大小,进而保证了队列的稳定性;由实际跟车效果来看,由于存在通信延时和驱动延时,主车的速度变化响应均会滞后于前车。对比图14(c)与图8(d)可见,主车速度变化趋势与仿真结果吻合,主车通过减速调节跟车距离与速度,并达到最终等速稳定行驶。由图14(c)中虚线处可看出:考虑旁车并线的跟车策略时,主车在第7.5 s即开始出现减速行为,而未考虑旁车并线的主车在第8.5 s之后才出现减速行为,且速度变化幅度更大;证明了本文所提CCC跟车策略,在出现旁车并行情况下,可以实现更早、更快速准确的响应,在保证队列行驶稳定性的基础上,提升了跟车的安全性。
4 结论
本文中以网联电动车辆为基础,设计了分布式的多层CCC网联巡航控制系统,理论分析了控制参数对控制器稳定性的影响,并在此基础上提出了一种考虑旁车并线过程的跟车策略。实车试验与理论仿真结果趋势相同,表明考虑旁车并线过程的CCC控制器可以更早、更快地响应旁车并线时的跟车目标变化,减小速度波动并降低车辆的紧急制动程度,提升乘坐的舒适性,保障了车队行驶的安全性。控制系统和跟车策略可用于任何主动控制驾驶的车辆中,保障人类驾驶与主动驾驶和谐相处的安全性。
由于受试验条件限制,本文中试验场景设计较为简单,未来可开展多车非匀速下的稳定性影响试验,研究传感器噪声对稳定性的影响。
猜你喜欢
测试技术学报(2023年2期)2023-04-06 04:38:30
内燃机与配件(2022年2期)2022-01-17 23:46:44
高技术通讯(2021年3期)2021-06-09 06:57:30
时代汽车(2018年4期)2018-05-31 02:53:08
东南大学学报(自然科学版)(2018年1期)2018-02-08 00:40:30
山东青年(2017年7期)2018-01-11 16:09:15
中国公共安全(2017年9期)2017-02-06 03:05:39
人民交通(2016年9期)2016-06-01 12:19:39
中学生数理化·高一版(2008年6期)2008-11-15 07:30:48
