
提高自动化生产线实训台异步电机定位精度自适应控制方法研究
2019-09-28 02:28温国强胡顺堂杨国俊刘晓明
实验技术与管理 2019年9期
温国强,胡顺堂,陈 宽,杨国俊,王 毓,刘晓明
提高自动化生产线实训台异步电机定位精度自适应控制方法研究
温国强1,2,3,胡顺堂1,陈 宽1,杨国俊1,王 毓1,刘晓明1
(1. 天津中德应用技术大学 汽车与轨道交通学院,天津 300350;2. 天津大学 精密仪器与光电子工程学院,天津 300072;3. 光电信息技术科学教育部重点实验室,天津 300072)
在YL-335B自动化生产线实训考核设备的分拣单元中,驱动传送带的三相异步电机在制动后的滑行距离受变频器设定的运行频率和下降时间影响,存在不确定性,导致工件不能准确地停在预定位置。通过采集大量滑行距离数据,采用多项式曲线拟合的方法,构建了滑行距离与运行频率和下降时间的数学模型,并提出提高三相异步电机定位精度的自适应控制方法。实验结果表明,该控制方法可根据运行频率和下降时间,自适应控制电机的停机位置,工件定位准确。
自动化生产线;异步电机定位;曲线拟合;自适应控制
YL-335B型自动化生产线是面向高职机电类专业开发的集机械技术、PLC控制技术、传感器技术、气动技术、电机驱动技术等多种技术为一体的综合实训考核设备,也是连续举办过10年的全国职业院校技能大赛高职组“自动化生产线安装与调试”赛项的指定设备。国内大部分高职院校机电类专业都配备了此设备,以支撑机电类专业的实践教学[1-11]。
虽然YL-335B型自动化生产线实训考核设备非常适合高职院校机电类专业的实践教学,但也存在一些问题有待解决。例如在第五站分拣单元中,三相异步电机驱动传送带将工件输送至待分拣料槽,停止后再由气缸推入;但电机的运行频率和下降时间影响着工件的停止位置,工件不能被准确推入料槽,致使职业技能大赛的参赛选手在比赛中丢分。电机的运行频率是指经过变频器处理后的交流电的频率,频率越高则电机转速越快,反之亦然;下降时间指电机停机时从运行速度下降到最低速度所用时间。
针对异步电机的控制,有关学者和技术人员进行了大量研究,例如利用神经网络的自学习功能提高交流异步电机系统的定位精度,采用模糊控制并结合矢量控制调速技术进行异步电机旋转角度的精确控 制[12],采用断电制动型电磁抱闸制动器、整流器、交流电磁接触器等元件使三相异步电机快速制动,缩短滑行距离[13]。本文在分析定位误差数据的基础上,采用曲线拟合的方法,预测工件的停止位置,提高三相异步电机定位精度的自适应控制,同时培养学生理论联系实践的能力。
1 YL-335B设备概述
YL-335B自动化生产线实训考核设备如图1所示。该系统由供料,加工、装配、分拣、输送等5个单元组成,每一单元为独立工作站,既能完成独立工作任务,又能进行联网工作。PLC为控制器,接受光电传感器、磁性开关、光电编码器等传感器的输入信号,控制气缸、电机完成规定的动作。输送单元为起始单元,通过伺服电机驱动机械手在水平导轨上移动,可实现精确定位,将工件搬运至指定位置。

图1 YL-335B自动化生产线实训考核设备
图2(a)所示分别为白色、黑色、金属材质的套件,这些套件存储于供料单元的料仓里,当物料台没有物料时,料仓中的套件便被气缸推出,完成供料动作。输送单元机械手抓取套件,将其搬运至装配单元;装配单元将芯件(见图2(b))装到套件中。由于芯件中间橡胶圈的存在,芯件只有一半装入套件中,如图2(c)所示。输送单元再将半成品工件从装配单元搬运至加工单元;加工单元可将芯件压入套件,完成加工任务。然后,输送单元将成品工件输送至分拣单元,根据不同的任务要求进行工件分拣。依图2所示的3种套件和3种芯件,套件和芯件可有9种组合。此外,该设备还配备了触摸屏,用于人机信息交互。
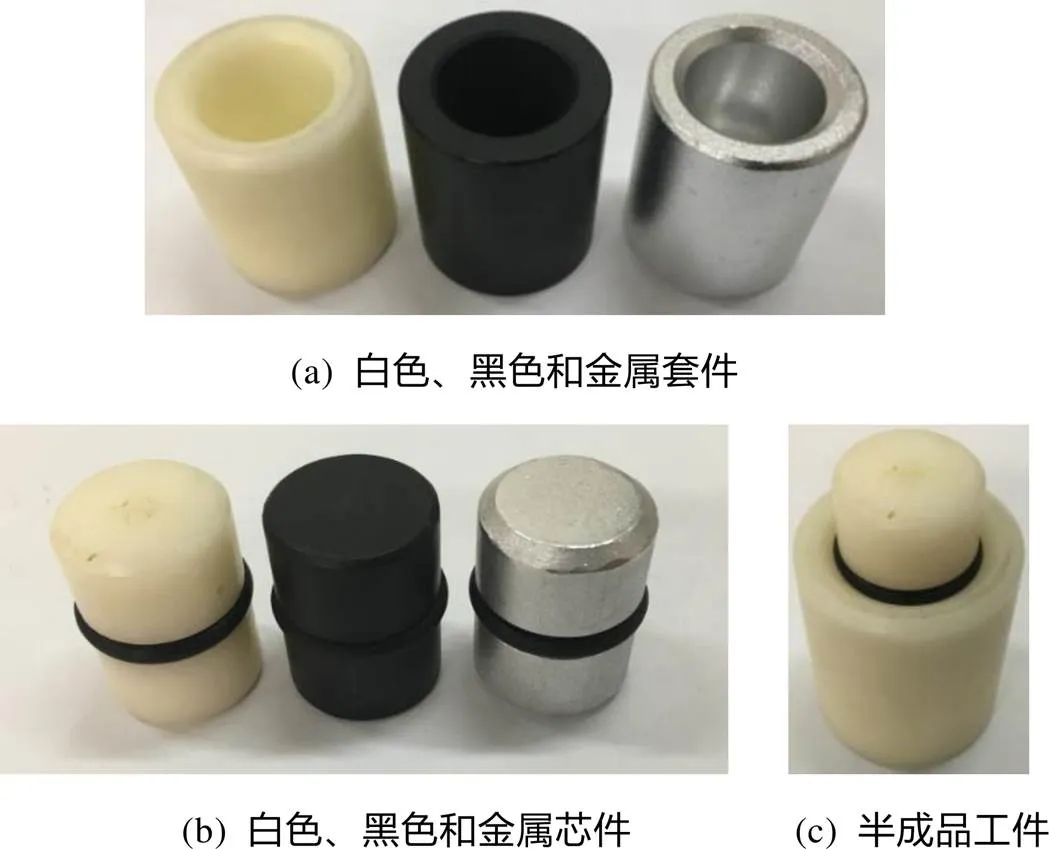
图2 工件
2 分拣单元
分拣单元由PLC、变频器、三相异步电机、旋转编码器、金属传感器、光纤传感器、气缸、3个物料槽及其他辅助结构构成,如图3所示。
上位机编写的程序可下载到PLC上,PLC通过控制变频器实现三相异步电机启停以及运转速度、运转方向的控制;编码器用于测算工件在传送带上的移动距离;金属传感器和光纤传感器组合使用,可判别工件的性质。由于分拣过程类似,本文仅考虑白色芯件嵌入白色套件、黑色芯件嵌入黑色套件、金属芯件嵌入金属套件的情况,暂不考虑混合嵌套情况,其判别情况如表1所示。
当工件被搬移到传感器检测范围内时,通过表1判别工件是白色、黑色还是金属材质。根据工件判别情况,传送带将工件输送到相应的物料槽位置,然后由推料气缸将其推入料槽。通常白色工件进料槽1,黑色工件进料槽2,金属工件进料槽3。
三相异步电机的运行频率和停止时间可由变频器设定,并且电机的转速越高,停机时旋转过的角度越大;同样,电机下降时间越长,其旋转角度也越大。所以,电机以不同的运行频率、不同的下降时间运行时,停机后旋转角度不同,导致传送带不能将工件输送至准确的位置,在料槽口左右有偏差,当偏差较大时,气缸不能将工件推入料槽,这给工件分拣工作造成了很大困难。
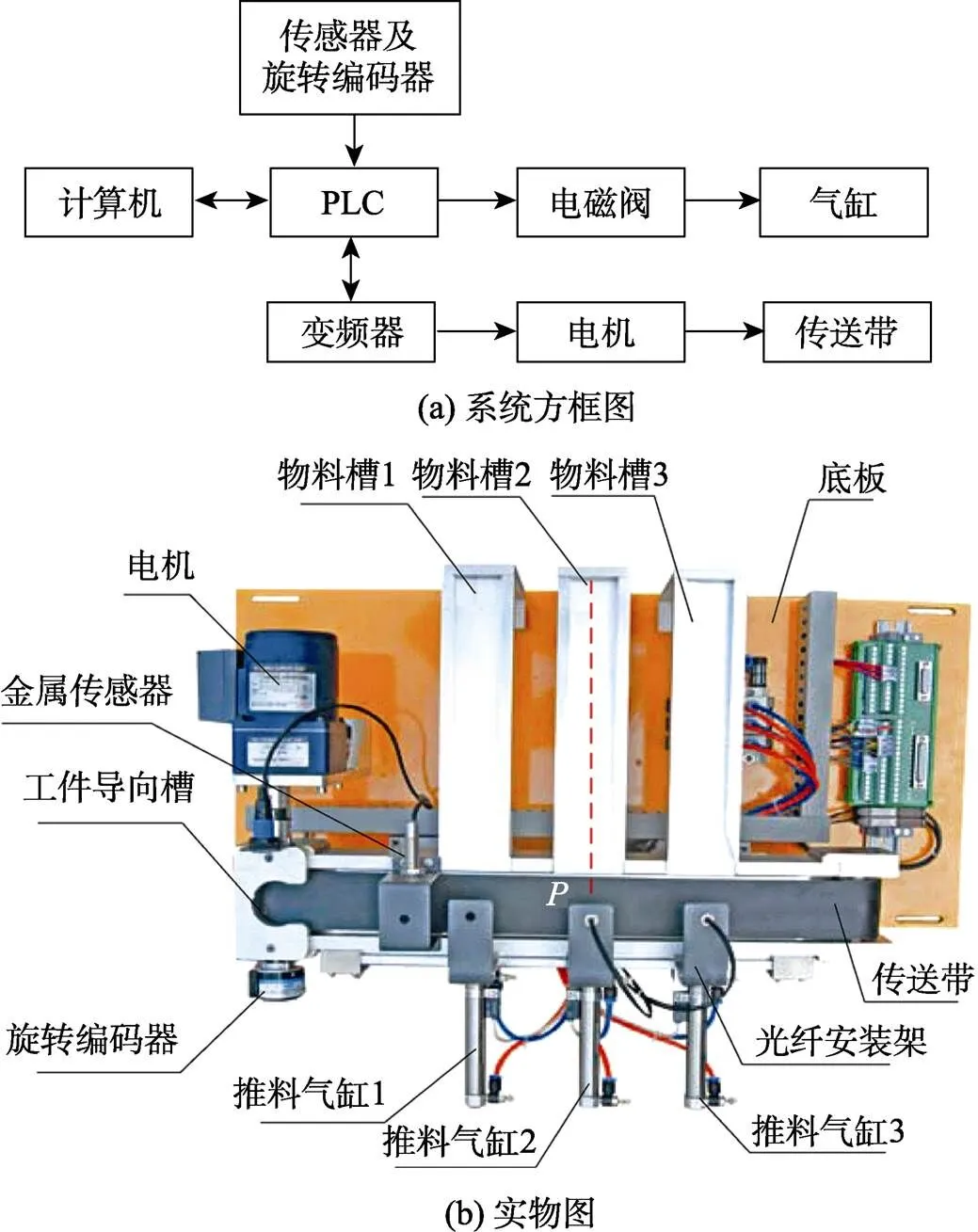
图3 分拣单元
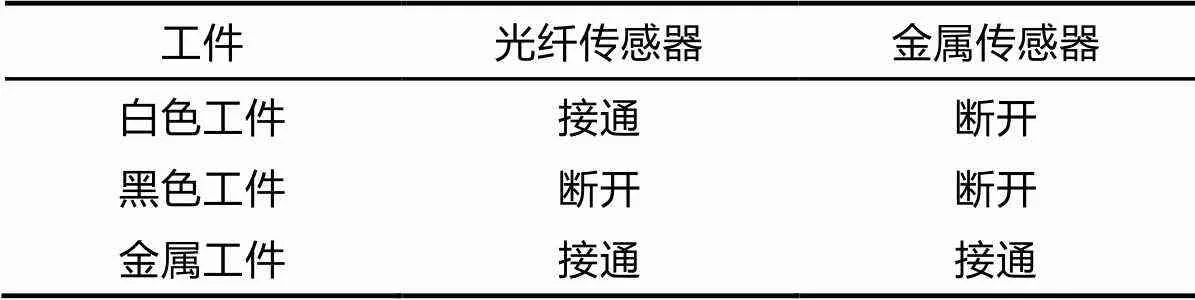
表1 工件判别
3 提高三相异步电机定位精度自适应控制方法
针对YL-335B型自动化生产线三相异步电机定位精度受变频器设定的运行频率和下降时间的影响的问题,提出一种提高三相异步电机定位精度的自适应控制方法。
假设三相异步电机驱动传送带带动工件A运行,将工件A运送到图3(b)所示物料槽2的点时停下,由推料气缸2将其推入物料槽。为消除电机制动时滑行距离的影响,实现工件A在电机不同速度(频率)、不同下降时间的准确定位,需要经过如下4个步骤:
(1)编写控制程序。当工件A运行到物料口2中心线位置时(旋转编码器计数值为3952),电机开始制动。测量工件A在电机不同运行频率、不同下降时间制动时,从物料槽2中心线点滑行过的距离,形成数据库,如表2所示。由表2可知,最大滑行距离为3 890脉冲(292.9 mm),平均滑行距离为1 129脉冲(73.4 mm)。

表2 实验数据 脉冲数
(2)将运行频率设为自变量,下降时间设为自变量,滑行距离设为因变量。将表2所示的实验数据载入Matlab软件,进行多项式曲线拟合,得出滑行距离与运行频率和下降时间的数学关系式,图4所示为Matlab曲线拟合结果。

图4 曲线拟合结果
由图4可知,滑行距离与运行频率和下降时间之间存在非线性关系。根据曲线拟合结果,并对曲线拟合结果做修正,得出滑行距离与运行频率及下降时间之间的数学关系式为



(4)当工件A到达1时,程序控制电机开始制动,经过一段距离滑行后,工件正好到达物料槽2中心线位置点并停下,实现准确定位。将自适应控制算法应用于电机停机控制后,实际停机时,工件位置相对于点的偏差如图5所示。
由图5可知,位置最大偏差为20脉冲距离(1.3 mm),平均偏差为6脉冲距离(0.4 mm),而之前的最大偏差为3890脉冲距离(292.9 mm),平均偏差1129脉冲距离(73.4 mm),极大地提高了定位精度,该方法还可用于其他位置的电机制动情况。
但是,上述三相异步电机停机自适应控制方法具有一定的适用范围。假设传送带将工件从开始位置输送到目标位置,距离为0,电机开始制动时,已经按照设定状态运行。根据式(2),电机应提前停止的位置为0-(2+3)。当0-(2+3)≥0时,工件能够实现准确定位;当0-(2+3)<0时,该方法则不适用。应设定电机运行参数,使0-(2+3)≥0,满足上述自适应控制方法的使用条件。
4 结语
针对YL-335B自动化生产线实训考核设备分拣单元中,因传送带滑行距离的不确定性导致工件不能被准确地推入料槽的问题,提出多项式曲线拟合的方法,得出滑行距离与下降时间和运行频率的数学关系,可根据运行频率和下降时间自适应调节提前停止的点。经实验证明,该方法提高了电机的定位精度,实现了电机停机的自适应控制,使工件能被准确地推入物料槽。
[1] 李拓宇,李飞,陆国栋.面向“中国制造2025”的工程科技人才培养质量提升路径探析[J].高等工程教育研究,2015(6): 17–23.
[2] 温国强,常文爽,杨健,等.《中国制造2025》视域下自动化生产线实训室建设方略[J].实验技术与管理,2019, 36(1): 266–269, 290.
[3] 陈鹏,薛寒.“中国制造2025”与职业教育人才培养的新使命[J].西南大学学报(社会科学版),2018, 44(1): 77–83, 190.
[4] 刘洋,谢胜利,蔡述庭,等.工业4.0与智能制造新形势下自动化创新型人才培养[J].实验室研究与探索,2018, 37(8): 275–278.
[5] 祁占勇,任雪园.扎根理论视域下工匠核心素养的理论模型与实践逻辑[J].教育研究,2018, 39(3): 70–76.
[6] 胡斌武,陈朝阳,吴杰.“中国制造2025”与现代职业教育发展路径探索[J].山西大学学报(哲学社会科学版),2016, 39(3): 91–96.
[7] 沈小碚,习凌冰.“中国制造2025”背景下职业教育内涵建设的思考[J].西南大学学报(社会科学版),2017, 43(3): 61–67.
[8] 张祺午.服务“中国制造2025”培养高素质技术技能型人才[J].中国高等教育,2018(增刊2): 63–65.
[9] 李一.德国面向工业4.0需求的职业能力体系构建与启示[J].职业技术教育,2017, 38(34): 69–73.
[10] 曹晔,盛子强,秦文.从工业0.0到工业4.0的职业教育演进与变革[J].中国职业技术教育,2018(25): 39–45.
[11] 管萍,张凤池.基于神经网络控制的交流异步电机定位系统[J].北京机械工业学院学报,2000(4): 19–23.
[12] 武广瑷,邓果,何保生.异步电机旋转角度精确控制的研究与实现[J].科学技术与工程,2014, 14(5): 40–45.
[13] 周华,林海云.一种用于三相异步电机的快速制动装置:CN107888111A[P]. 2018-04-06.
Research on self-adaptive control method for improving positioning accuracy of asynchronous motor in automatic production line training station
WEN Guoqiang1,2,3, HU Shuntang1, CHEN Kuan1, YANG Guojun1, WANG Yu1, LIU Xiaoming1
(1. Automobile and Rail Transportation School, Tianjin Sino-German University of Applied Sciences, Tianjin 300350, China; 2. College of Precision Instrument and Optoelectronics Engineering, Tianjin University, Tianjin 300072, China; 3. Key Laboratory of Opto-electronics Information and Technical Science of Ministry of Education, Tianjin 300072, China)
The uncertainty exists in the sorting unit of YL-335B automatic production line training and assessment equipment and in the effect on the sliding distance of three-phase asynchronous motor driving conveyor belt after braking by the frequency and time of frequency converter setting, which leads to the inaccurate stop of workpiece in pre-positioning. By collecting a large amount of gliding distance data and using polynomial curve fitting method, a mathematical model of gliding distance, running frequency and falling time is constructed, and an adaptive control method to improve the positioning accuracy of three-phase asynchronous motor is proposed. The experimental results show that the control method can self-adaptively control the stop position of the motor and locate the workpiece accurately according to the running frequency and falling time.
automatic production line; asynchronous motorpositioning; curve fitting; self-adaptive control
TP273.2;TM343
A
1002-4956(2019)09-0145-04
2019-03-11
全国教育科学规划课题教育部青年项目(EJA180469)
温国强(1984—),男,河北张家口,在读博士研究生,讲师,主要研究方向为光机一体化技术、智能制造技术。
E-mail: wgqdiamond@126.com
10.16791/j.cnki.sjg.2019.09.036
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
装备制造技术(2020年3期)2020-12-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
山东陶瓷(2020年5期)2020-03-19
自动化学报(2019年6期)2019-07-23
中国汽车市场(2016年16期)2016-09-12
中国照明(2016年5期)2016-06-15
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
