船载测量设备实时数字引导数据修正方法*
2019-09-27 01:36童艳
舰船电子工程 2019年9期
童 艳
(91550部队 大连 116023)
1 引言
随着测控任务向海上纵向延伸,海上测量船动基座测量成为测控系统不可或缺的一部分。海上测量船布设外测设备,承担了目标测控的部分外部跟踪测量任务。测量船测得的外测数据与地面布站设备测得的外测数据的区别是测量设备所在承载平台不固定,其测量精度通常会受到船体的摆动以及船体形变的影响。在初始未测得目标和目标丢失情况下,测量设备需要根据数字引导信息寻找目标,而数字引导信息通常以地心系目标绝对位置给出,在到达测量设备时要转换为测量系数据引导跟踪[1]。对于动基座测量设备而言,这个转换过程必须要考虑船摇和形变的影响进行必要的修正,才能提高测量设备的对准精度。本文针对此问题提出了一种动基座测量对准精度实时修正方法,力求消除动基座测量设备因船摇和形变对测量精度的影响。
2 数字引导数据的生成
数字引导数据由测控系统中实时数据处理软件汇集各测量设备数据实时解算得到测控目标的发射系坐标,通过坐标转换到地心系,并考虑通信时延得到外推结果,通过实时通信发送给各测量设备,从而引导测量设备捕获目标。测量设备通常分为外测和遥测[2]。外测精度高于遥测精度,因此引导数据使用外测方案的优先级高于遥测方案。但如果外测方案和遥测方案都没有形成,则只能采用当前飞行时刻对应的理论位置作为目标引导信源[3]。为了提高理论引导跟踪精度,传统做法是用外测或遥测方案形成的最后一点数据和对应理论位置的偏差值进行修正,最后经过外推得到引导数据[4]。不过,据统计在设备跟踪目标丢失前一点的测量值失真率较高,如果用这一点的跟踪结果进行修正,很可能达不到预期的效果,甚至有可能适得其反,起不到提高精度的目的。因此,本文提出采用积累偏差算法,将最后20点的偏差值积累,将这20个偏差值的统计期望值作为理论点修正值,理论引导数据算法见式(1)。从应用效果看要优于单点修正。

3 船载测量设备引导误差修正方法
船载测量设备在得知目标位置后,由于当前姿态的不固定和船体固有形变的存在,不能直接将此位置用于引导设备跟踪,为了消除船摇和形变引起的测量误差,需要对目标位置进行修正,这个过程通常称为船姿逆修正。动基座上的测控设备跟踪目标的方位基准是船的艏艉线,俯仰基准是甲板平面,站址基准是浮动的惯导三轴中心。为方便海上测量参数的使用和描述,测量船定义了自己专用的惯导地平坐标系、惯导甲板坐标系、测量坐标系[5]。除了这些船用坐标系,测量船在与测控中心交互时均采用通用坐标系,例如,测控系统中通常把地心直角坐标系作为测量分系统间的统一数据处理坐标系,使整个测控系统之间的数据有了统一的度量。
惯导地平坐标系的原点是惯导平台三轴交点,其基准面是惯导设备提供的当地水平基准面。由于船在海面上行使过程中存在摇晃,甲板并不与水平面平行,因此有了惯导甲板坐标系,它的原点也在惯导平台三轴交点,但基准面是甲板平面,当船浮在水中有摇摆时通常甲板平面与地平面不重合,因此,惯导地平坐标系与惯导甲板坐标系之间相差一个船摇。通常船载惯导设备能够测得船体摇摆角,但这个测量值只是惯导基座的摇摆角,而测量设备在测量船上是沿船艏艉线分散布局的,其测量坐标系的原点与惯导坐标原点不一致,况且船体并不是一个刚体,所以测量设备基座与惯导基座之间存在船体变形量。
因此采用如下一系列的坐标转换方法,对船姿和摇摆角进行修正,使设备得到修正的测量坐标系下的引导数据,以提高设备跟踪目标的对准精度。除了准确标校测量设备[6],提高数字引导数据的准确度是使设备准确捕获目标连续提供实时数据处理外测信息源的基础[7]。
地心系引导数据->惯导地平坐标系->惯导甲板坐标系(消除船摇)->测量坐标系(消除形变)
3.1 惯导地平坐标系引导数据
设备需要与装置位置无关的测量系坐标作为指引跟踪目标的输入信息,因此,需要将地心系引导数据转换为测量系数据。首先根据船载惯性导航系统实时提供的测量船位置信息,将地心坐标转换成惯导地平坐标。转换见式(2)。
地心坐标系直角坐标到惯导地平坐标系直角坐标的转换公式为

这里,L、B分别是测量船上地平坐标原点的大地经纬度,rOEP为目标在地心坐标系下的直角坐标为惯导地平坐标系原点在地心坐标系下的直角坐标。
3.2 消除船摇影响
船摇参数通过船上惯导设备能够实时测得。组合惯导平台测定动基座摇摆的姿态数据,通过坐标转换公式计算出修正的动基座扰动所需的跟踪参数。
惯导地平坐标系直角坐标到惯导甲板坐标系直角坐标的转换公式为

3.3 消除形变影响
在测量设备采用引导数据前,要考虑测量基座与惯导基座的船体变形量,加以修正才能提高引导精度[8]。基座之间的船体变形测量量以三个角度描述[9],分别为艏摇变形角、纵摇变形角、横摇变形角。消除形变的方法类似于消除船摇,只是三个转动角由舰艇艏向角、舰艇纵摇角、舰艇横摇角变为艏摇变形角、纵摇变形角、横摇变形角。转换公式参见式(3),得到的位置坐标是消除船摇和形变的测量系坐标值。
4 仿真结果
下面通过模拟测量船在理论弹道引导下的测量过程,对动基座测量引导对准精度实时修正算法的性能进行检验分析。
4.1 仿真测试条件
首先模拟一条待跟踪目标的理论轨迹,同时模拟动基座测量船的运动轨迹和运动参数。然后,分别在不修正姿态和修正姿态的情况下解算测量数据,用动基座数据处理方法对测量数据进行处理,并输出测量数据解算出的目标位置数据。将其与理论值进行比较,计算相应的误差。
具体测试时,模拟了两种船摇情况:
1)舰船的纵摇和横摇角在(4.0°,19.0°)附近作余弦波动,振幅均为1°;
2)舰船的纵摇和横摇角在(3.6°,17.0°)附近作余弦波动,振幅均为1°。
由上节内容可知消除形变原理和消除船摇原理类似,所以仿真仅以船摇为例进行验证。
4.2 测试结果

图1 姿态未修正时的空间位置位置误差曲线(情形1)
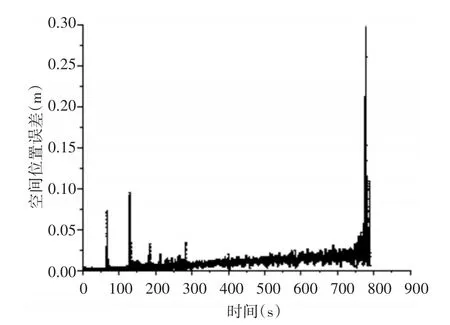
图2 姿态已修正时的空间位置误差曲线(情形1)
在第一种测试条件下,分别对引导数据不做姿态修正和做姿态修正,得到的测试结果见图1和图2。统计姿态修正前后空间位置误差结果见表1。

表1 姿态修正前后空间位置误差统计结果(情形1)
在第二种测试条件下,分别对引导数据不做姿态修正和做姿态修正,得到的测试结果见图3和图4。统计姿态修正前后空间位置误差结果见表2。
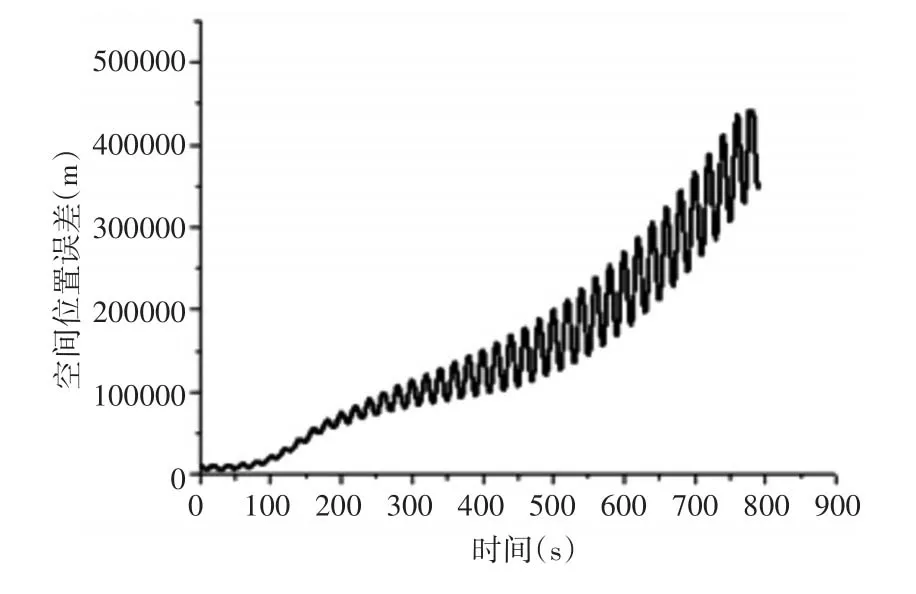
图3 姿态未修正时的空间位置误差曲线(情形2)

图4 姿态已修正时的空间位置误差曲线(情形2)
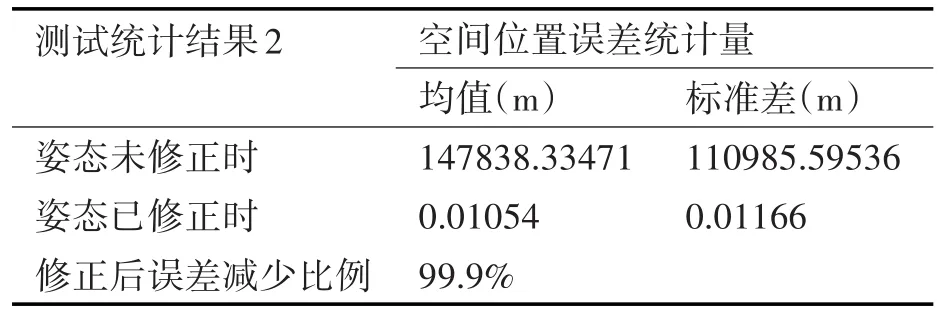
表2 姿态修正前后空间位置误差统计结果(情形2)
4.3 结果分析
从以上测试结果不难看出,在当前模拟测试条件下,相比姿态未修正时的动基座测量输出结果的空间位置误差,姿态修正后,可将由姿态导致的空间位置误差减少90%以上。当然,在实际应用过程中,影响误差的因素还有许多,对测量设备异常值的处理[10]、船体稳定性的度量[11]、测量船航速的变化对外测设备测速数据的影响[12]等都是需要在数据解算中考虑的因素。
5 结语
本文首先通过提出积累点修正理论轨迹提高理论轨迹引导时的引导数据源精度,并在动基座测量设备上考虑测量船的船摇和形变,消除引导误差,使动基座测量设备在实时引导状态下的跟踪目标对准精度大幅提高。最后通过仿真试验表明本文提出的引导数据实时修正算法提高了引导条件下的测量设备对准精度。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
导航定位学报(2022年2期)2022-04-11
华声文萃(2021年6期)2021-08-25
防爆电机(2021年2期)2021-06-09
意林(2021年10期)2021-05-28
数字海洋与水下攻防(2020年5期)2021-01-04
船舶标准化工程师(2019年4期)2019-07-24
北京航空航天大学学报(2018年1期)2018-04-20
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21