军用水下滑翔机技术方案研究*
2019-09-27 01:35邓鹏李伟丁浩
舰船电子工程 2019年9期
邓鹏李伟丁浩
(海军潜艇学院战略导弹与水中兵器系 青岛 266199)
1 引言
水下范围的无人自主航行器(AUV)在过去几十年从无到有已经发展出很多类型,囊括从基本的数据采集设备到高度复杂的无人水下航行器(UUV)。水下滑翔机作为UUV中的一类,因其特有的动力系统而具备超长的水下工作时间,随着自控技术的进步,UUV自主能力的提高,水下滑翔机逐步体现出其军用和商用价值。水下航行器通过调节载体自身浮力来,为载体提供上浮和下潜动力,水下滑翔机在载体浮力以及滑翔翼的作用下,产生向前的水平滑翔速度。水下滑翔机的典型轨迹如图1[1],锯齿型的轨迹类似滑翔机一样在海洋环境中反复下降上升。在锯齿运动的过程中,航行器装载的传感器和数据采集系统持续记录海洋的传导性、温度和深度等海洋数据。在水下滑翔机浮出水面后通过卫星将数据回传到控制中心,再下载最新指令,同时通过GPS等导航定位卫星进行定位和航路[2]。
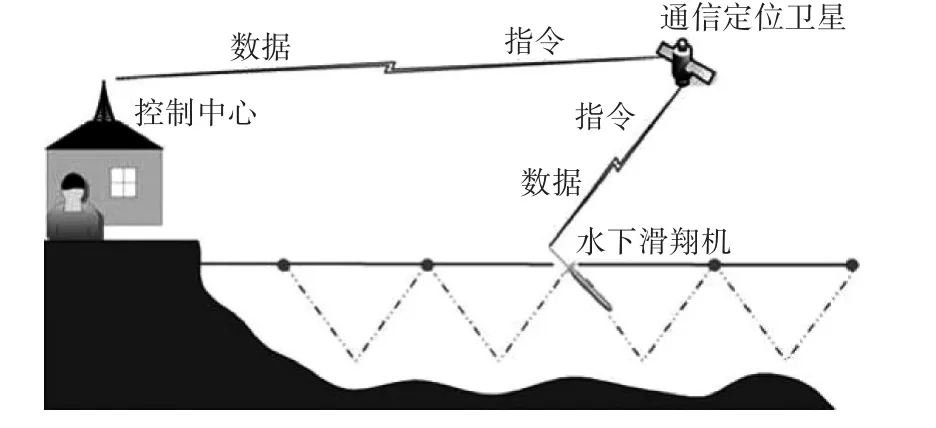
图1 水下滑翔机工作示意图
随着十几年的发展,水下滑翔机已经从最开始的一种相对简单的水下航行器变得越来越精密复杂,功能也越来越强大,但考虑到作战环境、装载条件等因素限制,军用水下滑翔机仍然与科研型或商用型水下滑翔机有较大区别。本文结合美国海军UUV总体规划中UUV担负的任务(情报、监视与侦察、反水雷、反潜战、观察与识别、海洋学、通信与导航网络节点、载荷输送、情报战、时敏目标打击)[3],通过研究目前典型商业水下滑翔机设计的技术方案[4~7],分析军用水下滑翔机的技术需求。
2 国外典型商用水下滑翔机
2.1 Spray Glider
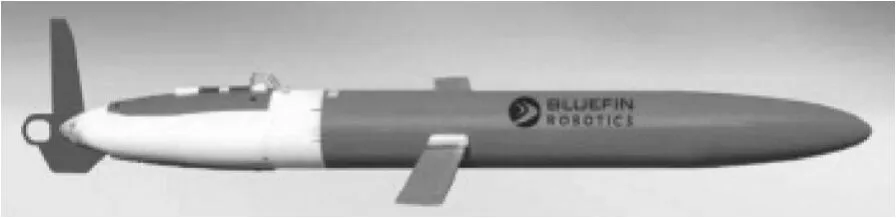
图2 Spray Glider
应用:海洋学,环境保护和监测,科学研究
布放/回收:人工
长度:213cm
直径:20cm
翼展:110cm
航深:1500m
通信:GPS、铱星(平衡翼),ARGOS(尾鳍)
浮力系统:液压泵
俯仰/横滚:移动块
能源系统:锂电池
航程/持续力:4800km/6个月
航速:0.2m/s
传感器:CTD,溶解氧测量计,荧光计、浊度计、高度计。
2.2 ANT Littoral

图3ANT Littoral(深海型)
应用:情报,监视,巡逻,反潜,反水雷,海洋学
布放/回收:吊车
长度:2.0m
直径:32.4cm
航深:10m~1000m
通信:铱星,802.11,GPS,GLOBALSTAR
浮力系统:液压泵
能源系统:锂电池
俯仰/横滚:移动块
航程/持续力:185km/30天
航速:1m/s
传感器:声学高度计,全向声传感器,定向声传感器,声/速度/温度/水压传感器,5kg载荷舱
2.3 Slocum Thermal Glider

图4 Slocum Thermal Glider
应用:海洋调查,环境监测,科学研究
布放/回收:人工
长度:1.5m
直径:21.3cm
翼展:120cm
航深:1200m
通信:射频调制解调器,铱星,ARGOS
浮力系统:温差泵
能源系统:海水温差
俯仰/横滚:移动块
偏航:舵
航程/持续力:40000km/3~5年
航速:0.4m/s
传感器:CTD
2.4 eFolaga

图5 eFolaga
应用:海洋调查,海底地形制图,检查安保,环境监测
布放/回收:人工
长度:2.2m
直径:15.5cm
空载净重:31kg
航深:50m
通信:GPS,水声调制解调器
浮力系统:液压泵
推进系统:泵喷/螺旋桨
俯仰/横滚/偏航:水喷/移动压载
能源系统:镍氢电池
航程/持续力:6个月
航速:1.01m/s(泵喷),2.02m/s(螺旋桨)
传感器:电导率,温度,光学传感器,侧扫声纳
3 典型军用水下滑翔机的技术方案分析
水下滑翔机最显著的特点一是超长的水下持续力和航程,二是航深可达上千米甚至数千米,适用于全球绝大部分海域,不足之处是航速过慢,普遍低于1m/s。其特点能满足大范围长时间的战场水文数据采集、水下战场监视侦查以及水下警戒预警等军事需求。通过比较以上几种典型水下滑翔机的技术性能和结构特点,可以在下面几个方面对军用水下滑翔机的技术方案进行分析。
3.1 壳体
水下滑翔机的壳体密封性的解决将能够大大增加水下滑翔机的可靠性和任务的持续时间。壳体中前部的湿舱可装载各种传感器(例如CTD或前视、侧扫声纳),后部的干舱可安装浮力系统的充气气囊。此外壳体表面还需处理以减少海洋生物的附着繁殖。为了便于装载和释放回收,军用水下滑翔机壳体应为雪茄型。
3.2 浮力装置
水下滑翔机的浮力系统建议使用电动力双泵系统,通过辅泵连接主泵将工作液体从耐压壳的储存器中泵到外部的气囊中。这种结构可以在大深度环境下提高浮力系统的性能。如果使用海域限制在浅海,单泵就可以满足需求,但是双泵的设计可以增加水下滑翔机的使用海域,提高工作性能。
此外,对于目前比较热门的温差浮力系统而言,虽然已经在Slocum Thermal上使用,但是由于对环境的要求过于严苛,对水下滑翔机的潜在使用海域限制较大。据分析,全球只有65%的海域适合使用温差型水下滑翔机[8]。在战术使用观点看,这大大限制了温差型水下滑翔机在军事方面的应用。
3.3 侧翼和稳定翼
任何有侧翼、尾翼或泵喷的水下航行器都可以从水面平台和潜艇的干式遮蔽舱(DDS)释放。若从潜艇的鱼雷发射管自行航行出管,则只能采用类似eFolaga的泵喷型推进器。但eFolaga在最大航速下连续航行时间只有6小时[9],不能达到水下滑翔机持续工作的要求。综合考虑,可利用鱼雷发射装置发射出管,壳体上的侧翼和稳定翼采用折叠式,出管后自行展开。
为了能从水面平台和潜艇的DDS释放,可以采用类似Slocum的侧翼配置,加上可控垂直稳定翼和双泵浮力系统,这样可在最大程度上延长持续工作时间。但稳定翼不建议结合通信天线,因为一旦受损会影响通信效果、任务执行和回收定位。而可更换的模块化设计更便于航行器的运载和储存,并可在回收后快速更换。
3.4 能源系统
除了温差系统外,大多数水下滑翔机多使用电池作为能源系统,不仅为浮力装置提供能源,还为装载的各种电子设备提供必要的能源。考虑到军用型对长航时和时敏性的要求,能源系统需要同时满足长时小功率输出和短时大功率输出两种状态。为了减少能源消耗,还可利用势差变化对电池充电。
3.5 控制
用于浮力装置和传感器供电的电池应该轴向布置,可以通过改变浮心和重心的间距,控制水下滑翔机的俯仰[11]。俯仰的绝大部分控制应由浮力装置和侧翼提供,同时改变重心和浮心的距离也能控制少许俯仰。这样配置将俯仰控制块在纵向的移动距离降到最小。横滚控制通过水下滑翔机尾部上方的可控垂直稳定舵实现。相比于通过控制内部转动滑块实现转向,这样能大大减少了转向时间,尤其在需要频繁重复转向的操航行中可以节省能量(例如水雷侦查)。
3.6 传感器
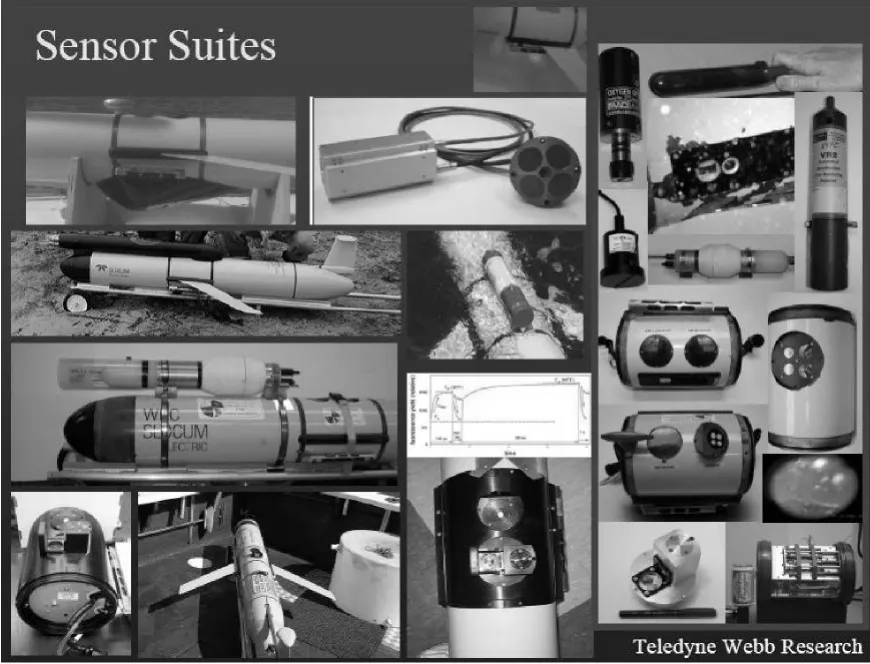
图6 Slocum水下滑翔机的传感器模块
目前水下滑翔机通用的传感器包括:CTD、高度计、罗经。此外,还有许多传感器可以整合到水下滑翔机中。如水听器、声学多普勒流速剖面仪、磁传感器、光散射衰减计等声、光、磁传感器,以实现对水下物理特性的测量和监视。
为了在不改变航行器总体重量和重浮力特性下使用多种传感器配置,需要采用标准化的传感器载荷模块。模块应有成熟的标准和接口控制文件,尽量减少对滑翔机其他部分的改动,避免对水下滑翔机进行重新配置。配置时需要全面考虑功能和功耗。
3.7 通讯/导航
美国海军水下滑翔机通常使用的通信导航系统是包括铱星和GPS的组合模块。根据任务海区不同,模块还安装一套加密设备以防通信数据被拦截。此外,美军通常在垂直尾翼上嵌入GPS/铱星的天线。这样可以避免增加额外的专用天线,更进一步优化流体动力。作为借鉴,我国的水下滑翔机可以使用卫星通讯和北斗导航的组合。
为提高行动的隐蔽性和集群协调配合,军用水下滑翔机的水声通信能力(如水下调制解调器)十分重要。多台水下滑翔机既可以按照数据测量模式使用,又可以按照数据中继模式使用,即把测量数据传回通讯节点或潜艇[11]。而军事行动为了避免发现,水下滑翔机是不能直接浮出水面来发送数据或进行定位校准的,定位校准应在夜间进行,且校准时间越短越好。但这样可能会增加导航误差,因此有必要在导航系统中使用航位推算技术。如果不能保证数据或导航定位的持续,在基本传感器中还要包括惯性导航单元,以提高导航精度。
3.8 释放和回收
目前水下滑翔机的释放回收主要有四种:在水面平台上用吊车吊放、通过导轨释放、潜艇的导弹或鱼雷发射管释放和发射装置发射[12]。
用吊车释放过程中需要保护水下滑翔机的壳体、传感器和侧翼不被损坏。在吊车起吊和DDS中固定时也应尽量选择在段与段之间的加固部位,类似图3吊带的布置。类似图4从甲板上用导轨释放时,水下滑翔机需要承受入水时的冲击。从潜艇的导弹发射管或鱼雷发射管释放,水下滑翔机后部需要有类似图2中Spray的固定释放部件。若用鱼雷发射装置发射,航行器侧翼和稳定翼需折叠,直径要与发射管直径相匹配。回收装置和释放装置一样。若在敏感海域执行任务则应考虑自毁功能。
4 结语
通过比较国外目前典型水下滑翔机的各项技术方案和性能特点,以水下持续力、航程和航深为主要军事需求,研究了军用水下滑翔机在壳体、浮力装置、侧翼和稳定舵、能源系统、控制、传感器、释放和回收等方面,得到既满足需求由比较合理的技术方案,总结如表1。
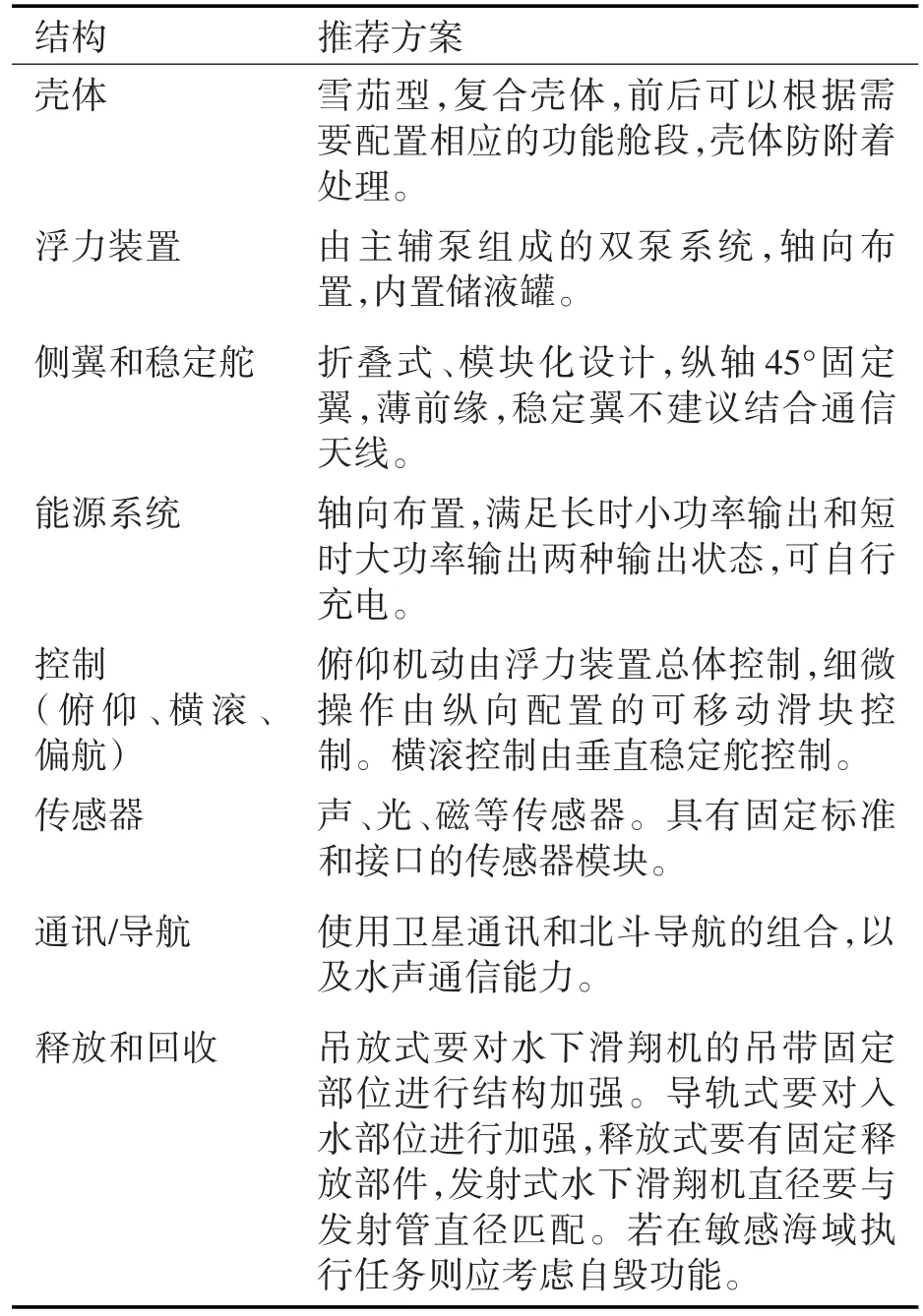
表1 军用水下滑翔机推荐结构方案
猜你喜欢
电子乐园·下旬刊(2022年5期)2022-05-13
太阳能(2022年1期)2022-03-05
军事文摘(2021年16期)2021-11-05
小学科学(学生版)(2021年9期)2021-11-02
军事文摘(2020年14期)2020-12-17
知识就是力量(2019年7期)2019-07-01
汽车维修技师(2018年8期)2019-01-15
军事文摘(2018年24期)2018-12-26
科技资讯(2016年8期)2016-05-14
课堂内外(小学版)(2016年3期)2016-04-05