
辅助机载惯导快速对准的光学测量装置
2019-09-26 02:36:54张百强孙婷婷王含宇
传感器与微系统 2019年10期
张 宇, 张百强, 孙婷婷, 王 烨, 王含宇
(1.92941部队44分队,辽宁 葫芦岛 125099; 2.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
0 引 言
惯性导航系统是最重要的导航方式之一,在航空航天、交通运输等领域具有重要应用。惯导系统的基本工作原理是对惯性器件测得的载体角速度、加速度进行积分运算以得到载体的运动参数信息[1],因此在工作前必须确定载体的初始姿态、速度等信息,即初始对准。
对于机载惯导,初始对准的快慢直接影响飞机出动的反应速度。飞机的惯导通常在飞机静止时完成初始对准,称为静基座对准[2]。静基座对准主要利用陀螺仪敏感地球自转角速度来进行对准解算,通过卡尔曼(Kalman)滤波进行误差估计[3]。其陀螺仪启动时需要一段时间预热,并且由于载体静止,其方位角的可观测性较差[4~6],误差收敛较慢。通常飞机精对准的对准时间需要15 min左右,若缩短对准时间,采用快对准方法,则精度较低,只能达到0.05°左右的对准精度。
为提高机载惯导对准的速度,需要引入外部装置或信息辅助惯导进行对准[7],例如导弹[8,9]、舰载机[10,11]上使用的惯导系统,常利用专门的光学测量装置进行辅助测量。在静基座条件下的机载惯导,其加速度计受到的干扰很小,因此,俯仰和滚转角可以通过加速度计较快地实现对准,外部装置只需完成方位角的对准即可。
本文提出了一种适用于地面飞机惯导系统快速对准的光学测量装置及方案,系统结构简单,无需对飞机进行改造,满足飞机快速对准的精度需求,提高飞机的出动反应速度。
1 测量装置构成和原理
机载惯导系统辅助对准装置的基本原理,即通过激光测距和三角换算,将飞机的航向存储固化下来,利用基准桩作为参考基准,在飞机惯导对准时,同样利用激光测距和反向换算,计算出飞机的航向信息,注入给机载惯导系统。
如图1(a),测量装置包含俯仰方位伺服控制系统、激光测距仪和光学相机,控制系统可精确地控制测距仪和光学相机进行俯仰、方位旋转,光学相机用于寻找飞机上的标志点,激光测距仪可精确地测量飞机上的标志点或基准桩上的标志点与测量仪之间的距离。
首先将测距仪调平。通过激光两次测距,测量出载机上的2个标志点到测量仪之间的距离,记为L1和L2,其对应的俯仰角为θ1,θ2,然后计算出L1,L2在水平面上的投影l1,l2,l1=L1cosθ1,l2=L2cosθ2。见图1(b)。
两次激光测距测量仪转过的方位角为ψ1,解由ψ1,l1,l2构成的三角形可计算出α角。同理,激光测距仪对两个基准桩进行测距,可计算出两个基准桩上的标志点到测量仪的间距l3,l4,以及β角。

图1 航向测量装置示意及原理
测量时的几何关系平面图见图1(c),激光测距测量仪测量飞机上的两个标志点时转过的方位角记为ψ1,测量仪测量飞机后转向基准柱时转过的方位角记为ψ2,测量两个基准柱转过的方位角记为ψ3,飞机航向角为yaw,机体上两个标志点在水平面上的投影点连线与飞机轴线的夹角为δ,基准柱连线与北向夹角为yaw0。根据几何关系可知
yaw1=yaw-α-δ,yaw2=π-(ψ2-yaw1),
yaw0=yaw2-β
(1)
由此可得基准柱方位角与飞机航向之间的几何关系
yaw0+δ=yaw+π-ψ2-α-β
(2)
在实际应用中,将yaw0+δ视为一个整体。
2 测量方法
在安装完基准柱时,方位角yaw0为未知量;对于每架飞机,其机体上2个标志点在水平面上的投影点连线与飞机轴线的夹角δ各不相同,也难以精确测量。因此,在测量仪投入使用前,需要进行标定实验。
标定时,载机停于泊机位,首先启动机上惯导,进行15 min的惯导精对准,输出载机的精确航向yaw。然后,对载机上的2个标志点进行测距,利用测距的结果,计算出α角。完成之后,测量仪转过ψ2方位角,对2个基准柱进行测量,计算出β角。
利用载机输出的精确航向值yaw、方位角ψ2,α,β和式(2),可计算出yaw0+δ的值。
基准柱建设完毕后,yaw0即固定不变;对于不同架飞机,由于标志点位置、个体结构差异的原因,δ值也各不相同,因此,每架飞机都需要进行一次标定实验,记录与其对应的yaw0+δ值。
在快速对准时,计算流程与标定刚好相反。飞机同样停在泊机位,测量仪首先对2个基准柱进行测量,计算出β角,然后测量仪转过ψ2方位角,开始对飞机上的2个标志点进行测量,计算出α角,然后利用标定时记录的yaw0+δ计算载机的航向值
yaw=yaw0+δ-π+ψ2+α+β
(3)
3 仿真计算与精度分析
为评估本文对准方式的对准精度,进行了仿真实验,在典型的应用情景下,对测量仪测距精度、俯仰及方位侧角精度对最终对准精度的影响,进行了评估。
在仿真中,测距点距离L1,L2,L3,L4分别为26,22,26,28 m,俯仰角θ1,θ2,θ3,θ4分别为10°,11°,12°,13°,方位角ψ1,ψ2,ψ3分别为55°,127°,16°,以该条件下计算出的航向对准值为基准,分别对激光测距仪误差、俯仰侧角误差、方位侧角误差进行分析。
首先,俯仰角和方位角不变,将激光测距仪加入0.3,0.5,1 mm(1σ)的随机误差以模拟实际测量中的不确定性,进行3组仿真,每组仿真进行50次测量,得到的对准误差分布见图2(a)所示。
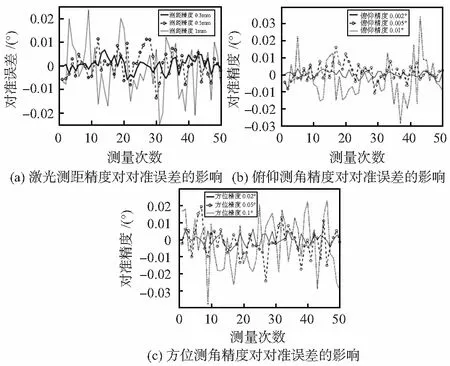
图2 仿真结果
然后,激光测距仪和方位角不变,将俯仰角加入0.002°(0.035 mrad),0.005°(0.087 mrad),0.01°(0.17 mrad) (1σ)的随机误差,进行3组仿真,每组仿真进行50次测量,得到的对准误差分布见图2(b)所示。
最后,激光测距仪和俯仰角不变,将方位角加入0.002°(0.035 mrad),0.005°(0.087 mrad),0.01°(0.17 mrad) (1σ)的随机误差,进行3组仿真,每组仿真进行50次测量,得到的对准误差分布见图2(c)所示。
将3组仿真实验的结果进行统计,可得如表1的对准误差统计结果,测量仪方位侧角误差对结果的影响大于俯仰侧角误差的影响。

表1 仿真误差统计结果
4 结 论
本文针对机载惯导精对准速度较慢、快对准精度较低的问题提出了一种光学测量辅助对准装置,该装置能够通过测量飞机上的标志点实现飞机航向的测量,其体积小、成本低、构造简单,无需对飞机进行大幅度的改造或增添复杂的装置,使用过程中可实现自动化测量,仿真实验结果表明,该装置的测量精度优于0.022°(1σ),优于快速粗对准的精度水平,能够达到提高对准精度、缩短对准时间的目的。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
建材发展导向(2021年13期)2021-07-28 07:14:56
电子制作(2019年9期)2019-05-30 09:42:02
中学生数理化·中考版(2018年11期)2019-01-31 06:18:04
测控技术(2018年2期)2018-12-09 09:00:56
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年7期)2017-06-05 09:36:14
