
无系统误差的CPⅢ精密三角高程控制网仿真研究
2019-09-21 07:45李建章
测绘工程 2019年6期
李建章
(1.兰州交通大学 测绘与地理信息学院,甘肃 兰州 730070; 2.地理国情监测技术应用国家地方联合工程研究中心,甘肃 兰州 730070; 3.甘肃省地理国情监测工程实验室,甘肃 兰州 730070)
CPⅢ控制网点数多,点位密集,利用精密水准建立高程控制网外业工作量大,效率低下,因此研究利用CPⅢ平面控制测量中的竖直角、斜距观测值构建精密三角高程控制网成为一个热点方向。
精密三角高程测量受到竖直角观测误差和斜距观测误差的影响,也受到大气折光、地球曲率、垂线偏差等系统性误差的影响[1]。系统误差由于具有累积性,对于CPⅢ精密三角高程控制网最终解算精度有较大的影响,因此如何消除系统误差的影响,是建立合格CPⅢ精密三角高程控制网的关键。
文献[2]通过构建差分观测值削弱球气差的影响,文献[3]则通过参数法来消除球气差的影响,都取得了良好的效果。但这些研究成果在现有条件下也不能保证所有的点都附合规范要求,如参数法要求高程基准点间距达到0.5~1 km才能获得附合规范要求的CPⅢ高程控制点,但实际线路水准点基点间距为2 km。在未来的研究中需要进一步提高CPⅢ精密三角高程控制网的精度,是降低偶然误差的影响还是进一步削弱残余系统误差的影响,这是首先需要解决的问题。
本文通过仿真数据研究在无系统误差影响下CPⅢ精密三角高程控制网可达到的精度,以及起算点密度、观测测回数等对CPⅢ精密三角高程控制网的影响规律,为CPⅢ精密三角高程控制网的下一步研究提供有力的支撑。
1 无系统误差影响的CPⅢ精密三角高程控制网平差模型
由于不考虑系统误差影响,因此选择非差模式构建CPⅢ高程控制网。如图1为CPⅢ平面控制网i测站观测示意图,其中实心正方形、实心圆圈、空心圆圈分别为线路基准点、测站点和CPⅢ点。
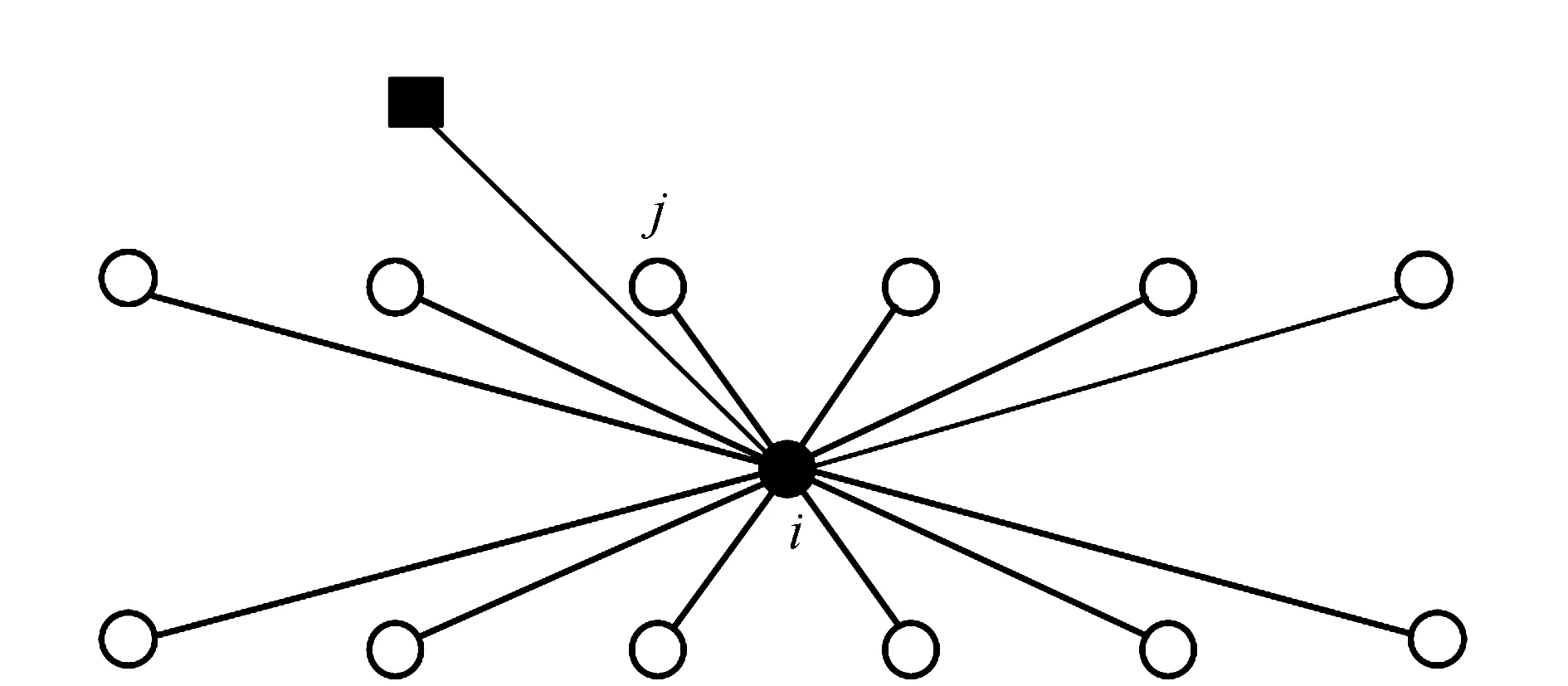
图1 CPⅢ精密三角高程控制网i测站观测示意图
在测站点i对各目标点进行观测,可获得竖直角、斜距以及方向观测值,其中竖直角和斜距观测值可进一步形成三角高程观测值。设对j点观测所得竖直角和斜距观测值分别为βij、Sij,则可得三角高程观测值:
hij=Sij×sin(βij) .
(1)
又设i、j两点最或然高程值分别为yi、xj,则:
hij+vij=xj-yi.
(2)
则得该观测值误差方程为:
vij=xj-yi-hij.
(3)
如果j点为已知点,且其高程为Hj,则其误差方程为:
vij=xj-yi-(hij-Hj) .
(4)
设有n个观测值,m个测站,t个CPⅢ高程点,则可写出如下矩阵形式的误差方程:
V=BX-l.
(5)
其中
(6)
依最小二乘法,可得待求参数最优估值
X=(BTPB)-1BTPl.
(7)
(8)
2 CPⅢ精密三角高程控制网仿真
由式(6)可知,B矩阵各单元值仅为1或-1两种结果,与CPⅢ点的高程、平面位置无关,仅反映了各点间的连接关系。由式(7)可知,待求参数估计值X与起算数据、原始观测值、观测值间的权比关系以及B矩阵有关。而由式(5)可知,观测值改正数与B矩阵、权阵以及X矩阵有关。
综上可知,待求参数的方差值与CPⅢ点的具体的高程、平面位置无关,只与各点间的连接关系、起算数据、原始观测值以及观测值权矩阵有关。因此CPⅢ精密三角高程控制网的仿真从两方面进行。
2.1 点位的仿真
如图2所示,首先建立一平面直角坐标系统。点位仿真具体步骤如下:

图2 CPⅢ仿真控制点示意图
1)确定起始点坐标及高程,如(x0,y0,H0),且纵横坐标及高程各加一随机数。
2)设CPⅢ点个数为n,则各点的坐标及高程如下:
式中,i为CPⅢ点序号;Δxi、Δyi、ΔHi为随机数[5]。
3)选定线路基准点。为简化程序设计思路,基准点与其最近的CPⅢ点绑定到一起。
式中L为基准点与左侧CPⅢ点的横向间距。
4)对所得各点坐标矩阵左乘一旋转矩阵,即:
式中θ为(0-360)之间的一个随机数。
2.2 原始观测值及误差的仿真
CPⅢ平面控制网测量时,要保证每个目标点(包括基准点)至少要在3个测站各观测一次。第一测站及最后一测站各观测4个CPⅢ点,第二测站及倒数第二测站各观测8个CPⅢ点,其余各测站每次观测12个CPⅢ点。当CPⅢ点附近有基准点时,要对基准点进行联测。由于基准点和CPⅢ点有绑定关系,因此每次搜索到被绑定CPⅢ点,就可以搜索到绑定的基准点。
搜索当前测站需要观测的目标点,再计算测站坐标及高程。
式中,u为当前测站的观测点个数;Δnc、Δec、ΔHc为随机数。
则各方向观测值为:
式中,αi、βi、si分别为目标点相对于测站点的方向观测值、竖直角观测值以及斜距观测值。θ为定向角,介于(0-360)之间的一个随机数。Δα、Δβ、Δs为方向观测误差、竖直角观测误差以及斜距观测误差,是正态分布的随机数,在MATAB软件中通过函数normrnd来产生[6]。
每测站生成一独立的观测值文件,按照RLT格式存储。
3 仿真试验研究
依据文献[7-8],要求CPⅢ高程中误差小于1 mm,相邻两点间高差中误差小于0.5 mm。现以TS30测量机器人为仿真对象进行试验,该仪器测角标称精度为0.5 s,测距标称精度为0.6+1 ppm。试验主要验证以下几个问题:
1)在工程现场目前条件下,无系统误差影响下的CPⅢ精密三角高程控制网所能达到的精度。
2)增加线路基准点密度,CPⅢ精密三角高程控制网精度的变化。
3)增加测回数,CPⅢ精密三角高程控制网精度的变化。
4)测距误差对CPⅢ精密三角高程控制网精度的影响。
由于在实际工程中,CPⅢ点绝对高程中误差较相邻点间的高差中误差更容易满足规范要求,因此本文只列出相邻点间的高差中误差曲线。
方案一:线路基准平均点间距为2 km,试验线路长分别为4 km、8 km、12 km,每测站观测3个测回。
从图3—图5可以看出,在线路基准点间距为2 km的条件下,线路长度增加,CPⅢ精密三角高程控制网精度变化可以忽略不计。

图3 4 km线路相邻点间高差相对中误差曲线

图4 8 km线路相邻点间高差相对中误差曲线
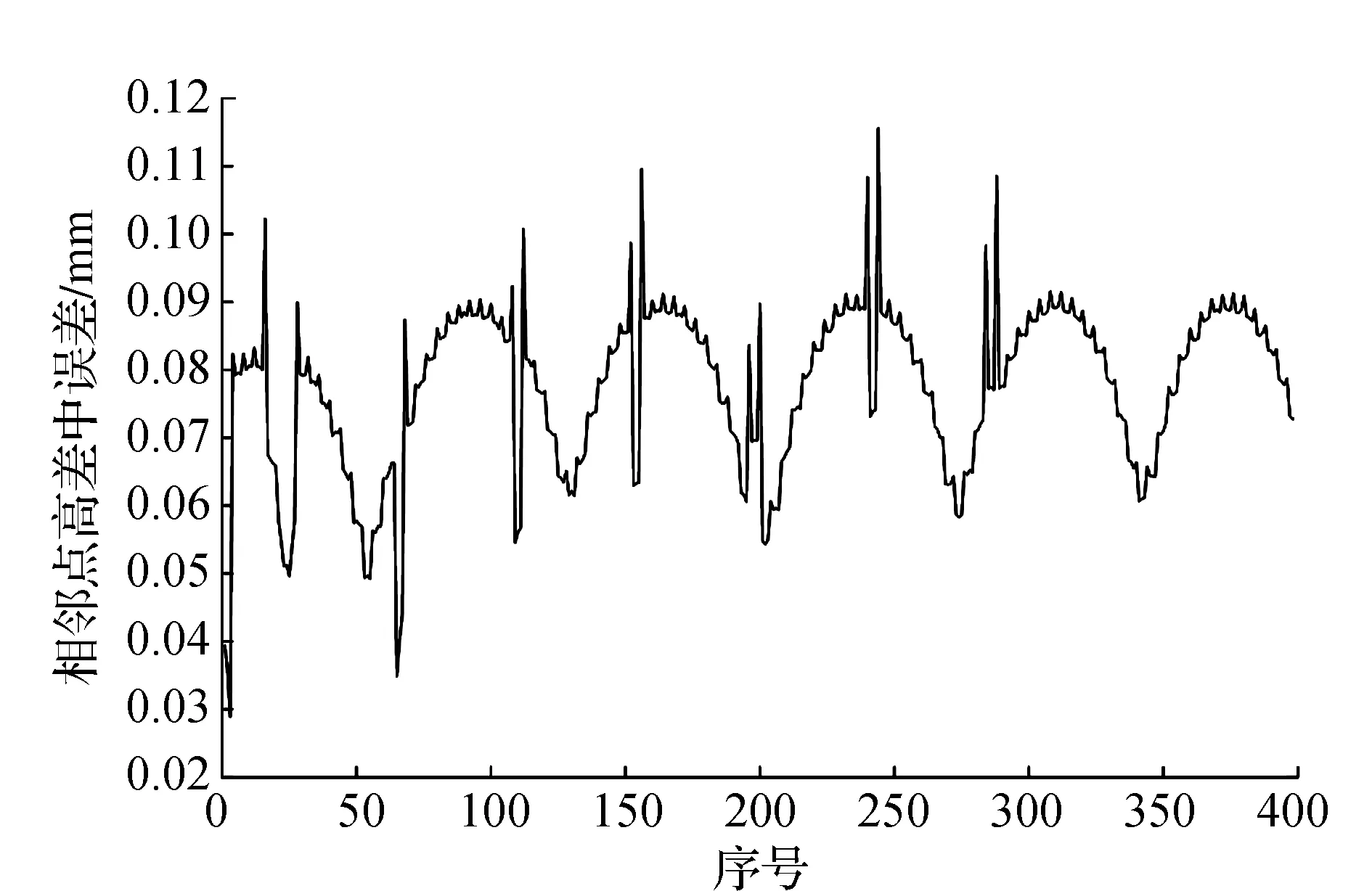
图5 12 km线路相邻点间高差中误差曲线
方案二:以线路长为12 km的CPⅢ精密三角高程控制网为例进行试验,基准点间距取1.7 km、1 km、0.48 km、0.24 km。
由图6可看出,控制网整体精度随着基准点密度的增大而逐渐提高,但提高幅度不大,且提高幅度逐渐变小。
方案三:线路基准平均点间距为2 km,试验线路长12 km,试验在二测回、三测回、四测回、五测回条件下的邻点间高差中误差曲线。
由图7可知,随着测回数的增加,控制网整体精度也有所提高,但提高幅度逐渐减缓。
方案四:线路长4 km,线路基准点间隔为2 km,CPⅢ点间高差可最大达10 m。要求观测3测回,测角误差为0,仿真数据解算结果如图8所示。
由图8可知,在CPⅢ精密三角高程测量中,距离测量误差对控制网最终解算精度的影响可以忽略不计。

图7 12km线路不同测回数条件下相邻点间高差中误差曲线

图8 12 km线路无竖直角观测误差下相邻点间高差中误差曲线
4 结束语
本文通过仿真数据研究了无系统误差影响下线路长度、测回数、基准点间距等因素对CPⅢ精密三角高程控制网精度的影响。通过试验可知:
1)在没有系统误差影响的情况下,相邻CPⅢ点间高差中误差小于0.15 mm,完全可以达到精密水准测量的精度[11]。然而通过大量实测数据解算发现大多CPⅢ精密三角高程控制网的解算精度在0.4 mm左右,这说明实测控制网中系统性误差残余误差依然是存在的。
2)通过增加测回数、增加线路基准点密度来降低偶然误差的影响,这对控制网最终解算精度的影响是非常有限的。
3)测距误差对控制网解算精度的影响可以忽略不计。
系统误差具有累积性,往往会导致控制网整体精度的下降,致使部分成果超限。文献[4]通过参数法消除CPⅢ精密三角高程控制网中球气差的影响,取得了良好的效果。因此在下一步的研究中,垂线偏差对CPⅢ精密三角高程控制网的影响及其规律是要研究的重点内容。
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
煤气与热力(2021年10期)2021-12-02
装饰装修天地(2020年11期)2020-07-04
铁道勘察(2018年5期)2018-10-22
山东工业技术(2017年24期)2017-12-29
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
房地产导刊(2015年6期)2015-10-21
