
基于LCL滤波的三相电压型PWM整流器控制策略研究
2019-09-19 11:53
重庆电力高等专科学校学报 2019年3期
(重庆理工大学 电气与电子工程学院,重庆 400054)
PWM整流器具有能量双向流动、单位功率因数运行以及网侧电流正弦化等特点[1],实现了“绿色电能变换”,被广泛运用到电气行业各个领域中[2-3]。
在高压大功率场合,三相电压型PWM整流器网侧若采用L滤波器,虽然结构简单,控制方便[4],但滤波电感体积很大,系统响应速度较低,而且PWM整流器产生的高次谐波,会对电网造成污染,干扰某些电网设备[5-6]。因此,在大功率并网发电系统中,通常采用LCL滤波器,相比传统的L滤波器,LCL滤波器可以有效减小系统体积、消除谐波以及降低损耗[7]。LCL滤波器在谐振频率时的阻尼为零,严重影响了系统稳定性[8-9]。针对这个问题,通常采用无源阻尼法和有源阻尼法来增加阻尼,提高系统稳定性[10]。无源阻尼法是采用在电感或者电容支路串、并联电阻的形式,来增加系统阻尼,该方法控制简单,稳定可靠[11-12],但是随着功率的增加,系统损耗会变大,不适用于高压大功率场合[13]。为了有效提升系统阻尼,又不增加损耗[14-15],以虚拟电阻为基础的有源阻尼控制策略成为研究的重点。
1 PWM整流器数学模型
基于LCL滤波的三相电压型PWM整流器(VSR)拓扑结构如图1所示。网侧由电感Lg、L和电容Cf以及寄生电阻R1、R2组成,具有滤波、升压和能量交换等功能;直流侧由滤波电容Cd和负载电阻RL组成。

图1 基于LCL滤波的PWM整流器
取单相LCL滤波器结构进行分析,如图2所示。
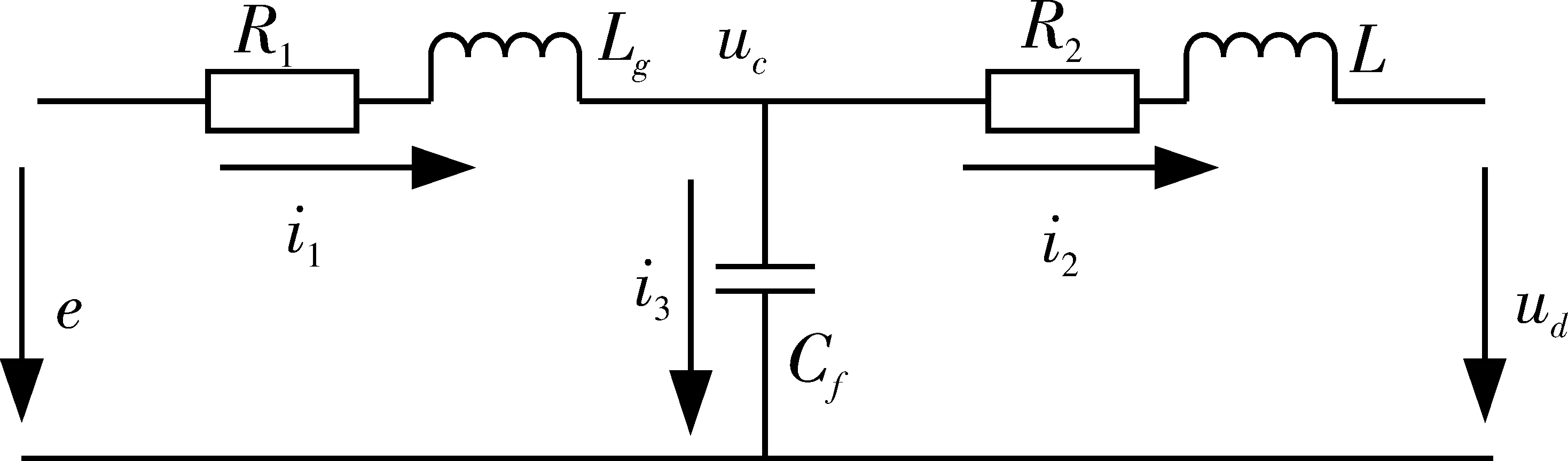
图2 单相LCL滤波器结构
根据图2,得到三相VSR在静止坐标系下的数学模型为
(1)
由于三相VSR每相桥臂都有两种开关状态,一共有23=8种开关状态,则可定义如下开关函数
(2)
根据式(1)和式(2),得到三相VSR在三相静止坐标系下的数学模型为
(3)
通过坐标变换将三相静止坐标系(abc)下的数学模型,转变到旋转坐标系(d-q)下,其状态方程为
(4)
根据式(4),得到三相VSR在d-q坐标系下的数学模型框图,如图3所示。
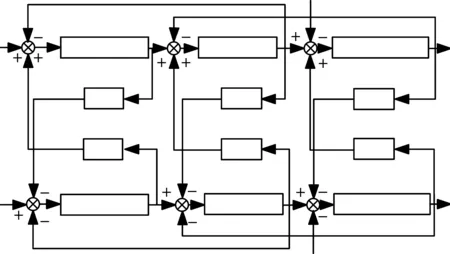
图3 基于LCL滤波的三相VSR在d-q坐标系下的模型
从图3中可得,三相VSR存在三组耦合量,分别为电感Lg、L的电流以及电容Cf的电压。在d-q同步旋转坐标系下,可以直接对三相VSR的有功电流和无功电流分量进行控制,进而简化系统功率调节。
2 LCL滤波器设计
采用LCL滤波器,不仅要满足网侧谐波含量要求,还要考虑滤波器吸收的无功功率小、系统控制要求高以及成本问题等。根据稳态条件下三相VSR输出功率的能力大小,总电感量Lg+L应满足
(5)
式(5)中:ep为网侧电压峰值;ilp为电感电流峰值。并且,滤波电容Cf产生的无功功率一般小于系统额定功率的5%,即
(6)
式(6)中:vc为电容电压;Pn为系统额定功率。
根据最大电流纹波幅值Δimax的控制要求,结合式(5),设计出电感L相应的值
(7)
确定电感L的值后,根据式(7)可计算电感Lg的值
Lg=mL
(8)
式(8)中,m为网侧电感比例系数。
根据式(6),可计算滤波电容Cf
(9)
3 基于虚拟电阻的控制方法
根据式(3),得到整流器的传递函数为
(10)
根据式(3)和式(10),得到整流器在电容支路串接电阻Rc的传递函数为
(11)
选取合适的Lg、L和Cf的参数值,在MATLAB中描绘出G(s)、Gc(s)的伯德图,如图4所示。
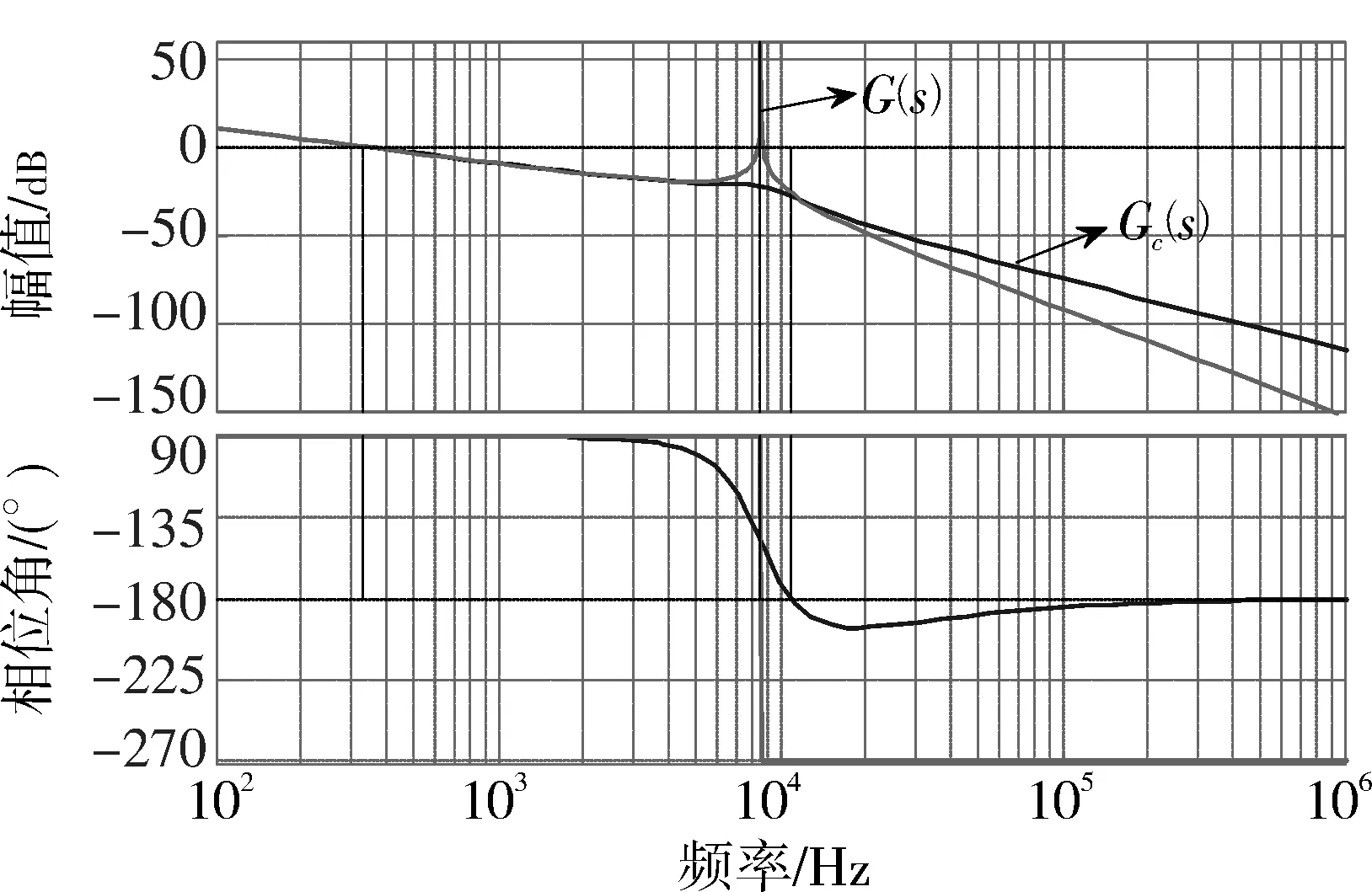
图4 G(s)、GC(s)的伯德图
从图4可以看出,G(s)在谐振频率处有一尖峰过冲,增加了电流畸变率,其原因是滤波电容Cf的存在使得系统阻尼降低;因此可以采用滤波电容串接电阻来增加系统阻尼,抑制谐振,但该方法在高压大功率场合损耗较大,可行性较低。针对上述问题,基于虚拟电阻法的LCL滤波的有源阻尼控制方法被提出。图5和图6分别为电容支路串接电阻和虚拟电阻的等效结构图。通过对比可以得到,图6比图5只多了阻尼电流分量i3sCfRc,而该分量可以利用算法实现。其基本思想为:检测滤波器的电容电流i3,与sCfRc的乘积叠加到电压外环的指令上,经过PI调节,控制整流器,从而实现虚拟电阻替代实际电阻,减少系统损耗。
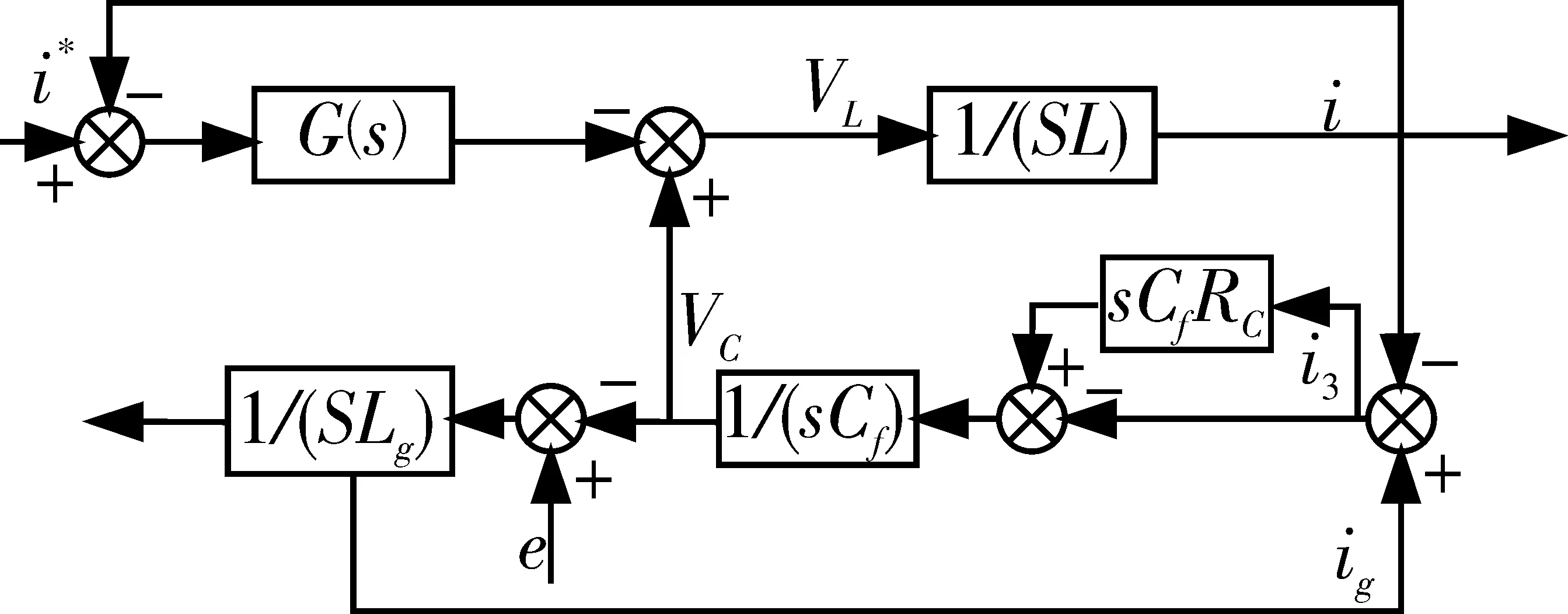
图5 电容支路串接电阻控制结构
根据图6,得到图7所示的虚拟电阻实现方法的控制结构。

图7 虚拟电阻实现方法控制结构
通过图7可得:与传统电压电流双闭环控制策略相比较,基于虚拟电阻的控制方法需检测电容电流i3,然后通过微分环节sCfRc作用到参考电流i*上,即可实现虚拟电阻替代实际电阻,完成控制。
运用该方法,可以有效抑制谐振,降低损耗,提高系统稳定性。合理的滤波器参数设计对系统稳定性起着至关重要的作用,首先根据式(6)至式(8)选取Lg、L和Cf的参数。其次确定虚拟电阻Rc的值,如果Rc较大,谐振尖峰衰减速度加快,但系统滤波性能会受到影响;如果Rc较小,系统有可能不稳定。所以Rc的选取要兼顾系统滤波性能与稳定性,通常取Rc=1/(3ωresCf),ωres为系统谐振角频率。
4 仿真与结果分析
为验证基于LCL并网变换器参数设计和控制策略的正确性以及可行性,在MATLAB/Simulink平台下搭建仿真模型,系统仿真参数选取如表1所示、系统主要技术指标如表2所示;图8~图12为三相电压型PWM整流器在满载时,系统仿真结果;图13~图14为负载突变时,网侧电流和直流侧输出电压的波形。
图8为锁相环检测到的角度波形;从图9、图10以及图11可看出,交流侧电流与电网电压无相位差,跟随性能良好;直流侧输出电压稳定在680 V,波动小,网侧电流THD(3.09%)<5%;图12为满载时系统的有功、无功分量分析,系统稳定输出有功功率9.6 kW,无功功率接近0,功率因数保持在0.99以上,满足系统设计指标。
表1 系统主要仿真参数

表2 系统主要技术指标

图8 输出角度

图9 交流侧A相电压和电流波形
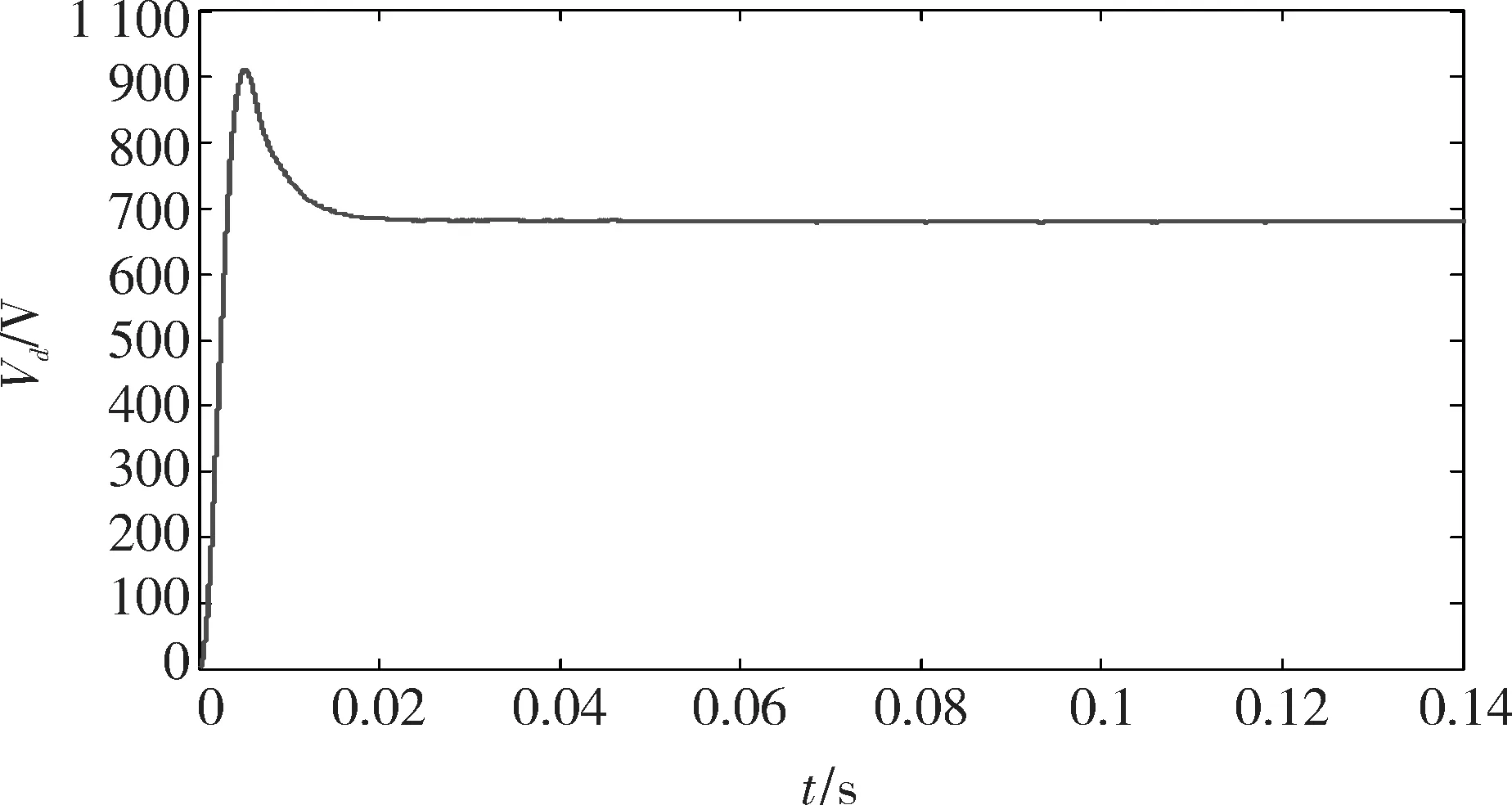
图10 直流侧输出电压波形
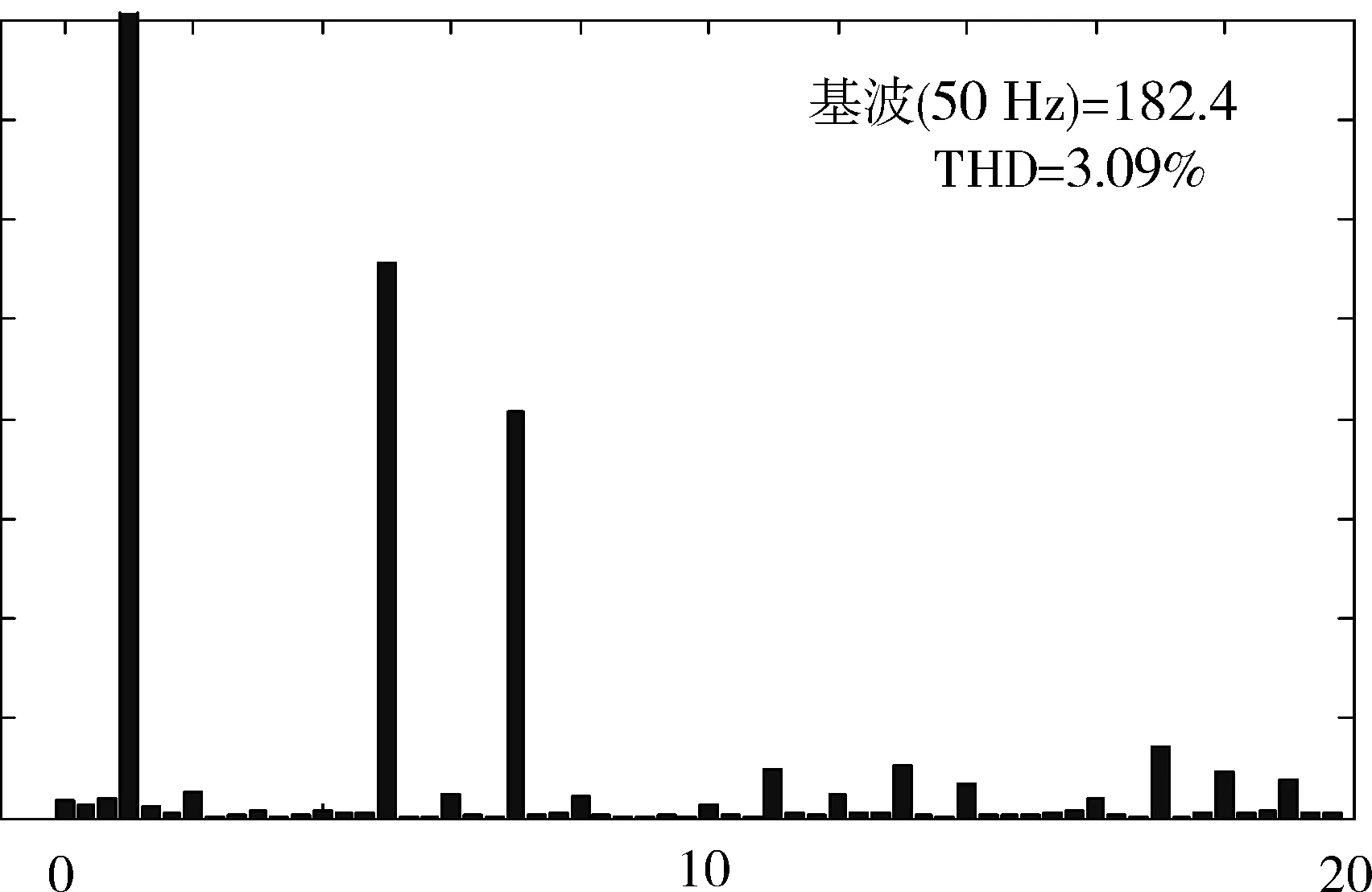
图11 满载下的谐波含量

图12 满载时系统有功、无功分量与功率因数分析
观察图13和图14可得到,负载从50Ω突变为25 Ω时,网侧电流响应速度较快,并且未发生波形畸变;直流侧输出电压有微小波动然后迅速恢复到稳定运行状态,动态特性良好。证明系统参数设计正确。

图13 负载突变时电网电流波形
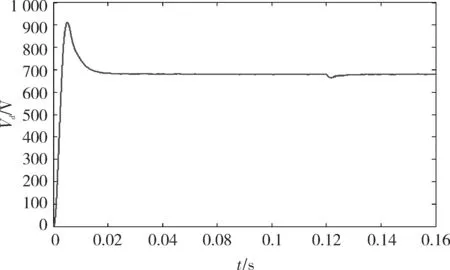
图14 负载突变时直流侧输出电压波形
5 结语
通过对基于LCL滤波的三相电压型PWM整流器的分析,运用解耦方法,建立其d-q坐标系下的数学模型。为了避免系统谐振问题,采用基于虚拟电阻的有源阻尼控制策略提高系统稳定性。在MATLAB/Simulink平台下搭建系统仿真模型,验证虚拟阻尼控制策略的正确性与可行性,并得出以下结论。
1)LCL滤波器对高次谐波具有较好的抑制效果,可以有效降低电流谐波畸变率,改善电能质量;
2)本文分析研究的虚拟阻尼控制策略能有效改善LCL滤波器的谐振问题,降低损耗,提高效率,适用于高压大功率场合。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
自动化学报(2019年12期)2020-01-19
电子制作(2019年23期)2019-02-23
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
电子制作(2017年19期)2017-02-02
