
电梯制动器智能监测系统的应用研究*
2019-09-17 00:40:04韩郡业冯月贵王会方宋来军倪敏敏
网络安全与数据管理 2019年9期
韩郡业,冯月贵,王会方,宋来军,金 严,倪敏敏
(南京市特种设备安全监督检验研究院,江苏 南京 210019)
0 引言
电梯制动器是电梯的重要安全部件之一,其任何一次制动失效都会导致电梯存在重大安全隐患,严重时导致冲顶、蹲底、溜车和停层失控等电梯安全事故[1],危及人民群众的生命财产安全。电梯制动器的失效是一个系统问题,产生的原因多样化、无序化,常见的失效形式主要有制动力不足、闸瓦工作不可靠、制动卡阻等[2]。为有效地防范冲顶或蹲底等电梯安全事故的发生,制动器的可靠性和稳定性越来越得到广泛的关注,制动器的实时监测装置也得到进一步的研究[3]。根据部分企业使用情况,制动器一般存在安装繁琐、统一通信规约及监测费用比较高等问题。为了有效解决上述问题,本文研发了一种低成本、易安装、可靠性强的制动器智能监测系统。该系统采用非接触式测量方法,将对制动力的监测转化为对制动距离的监测。本文详细分析了非接触式制动距离测量采集电路的硬件设计原理和上下位机软件设计流程,设计了优质、高效的电梯制动器智能监测系统,实时保障电梯的安全运行。
1 电梯制动器智能监测系统测量原理及整体方案
1.1 电梯制动器智能监测系统测量原理
基于电梯制动器失效模式及故障原因分析,实现对电梯制动器工作状态的智能监测,制动器智能监测系统应能够实时采集制动器的制动轮与闸瓦间隙、闸瓦磨损量、制动距离、制动电磁线圈电压值(包括开闸电压和维持电压)、曳引机工作电流。采用两个LVDT传感器对制动轮与闸瓦间隙和闸瓦磨损量进行测量,将其分别安装在两个制动导靴的侧面上,两个传感器探头到制动轮端面距离相同,安装中心线夹角为180°。采用旋转编码器测量制动距离,旋转编码器与制动轮同轴安装。制动线圈电压值和曳引机工作电流分别采用WB V121S07和WB I412F21传感器进行测量[4],实现对制动器和曳引机工作状态的监测。图1为传感器安装示意图。
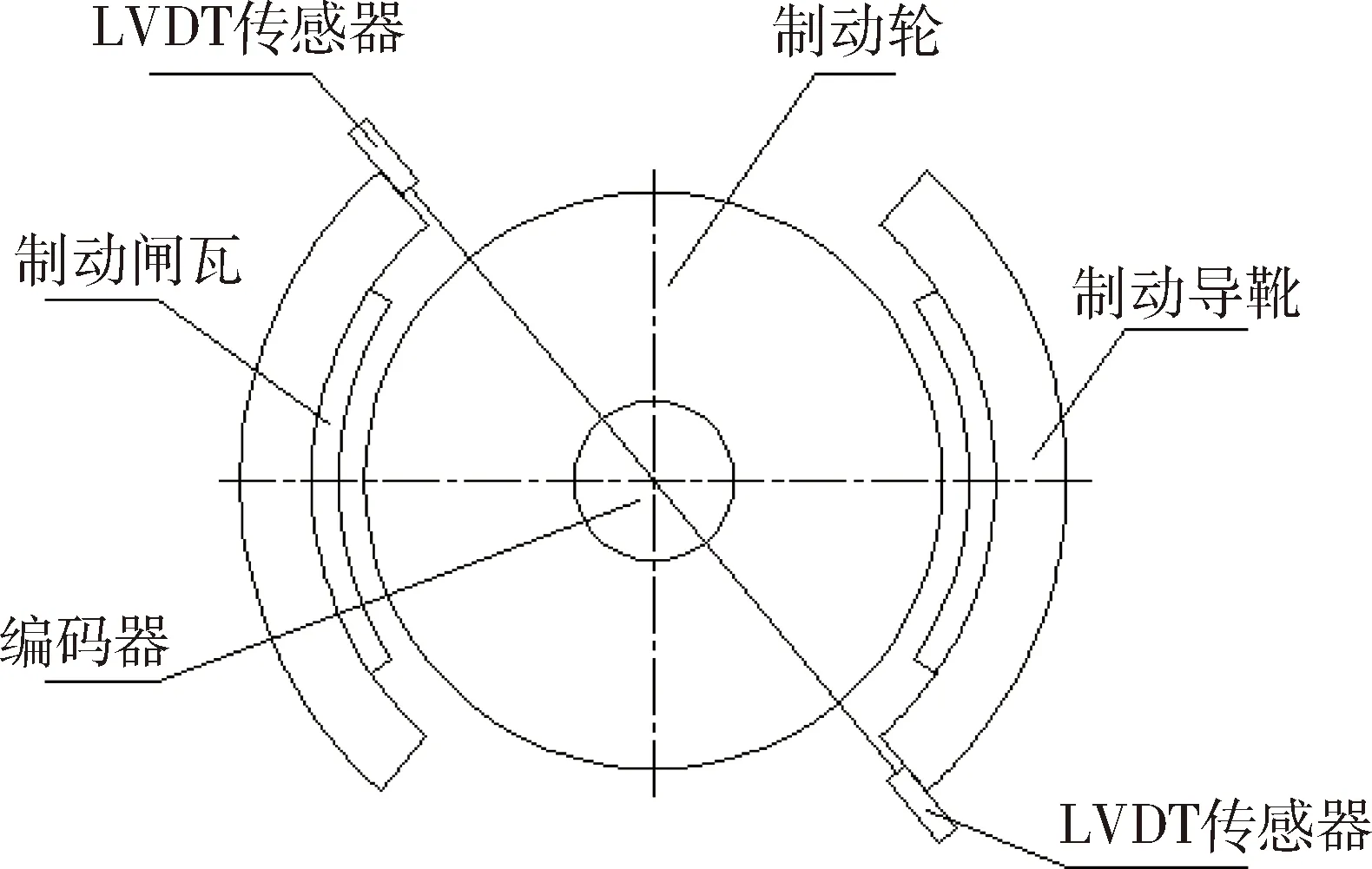
图1 传感器安装示意图
图2为电梯制动器抱闸间隙及闸瓦磨损量的测量方案图,以左侧为例说明其测量原理,右侧测量方法同理。其中,X0和Y0分别为闸瓦未磨损时开闸和合闸时传感器端面与制动轮的距离,X1和Y1分别为闸瓦磨损时开闸和合闸时传感器端面与制动轮的距离,由此,可利用式(1)计算出闸瓦与制动轮端面的间隙,用式(2)计算出闸瓦磨损量。设闸瓦最大允许磨损量为d,当Δd>d时,上位机进行闸瓦磨损异常报警。
di=Xi-Yi
(1)
Δd=Y0-Y1
(2)
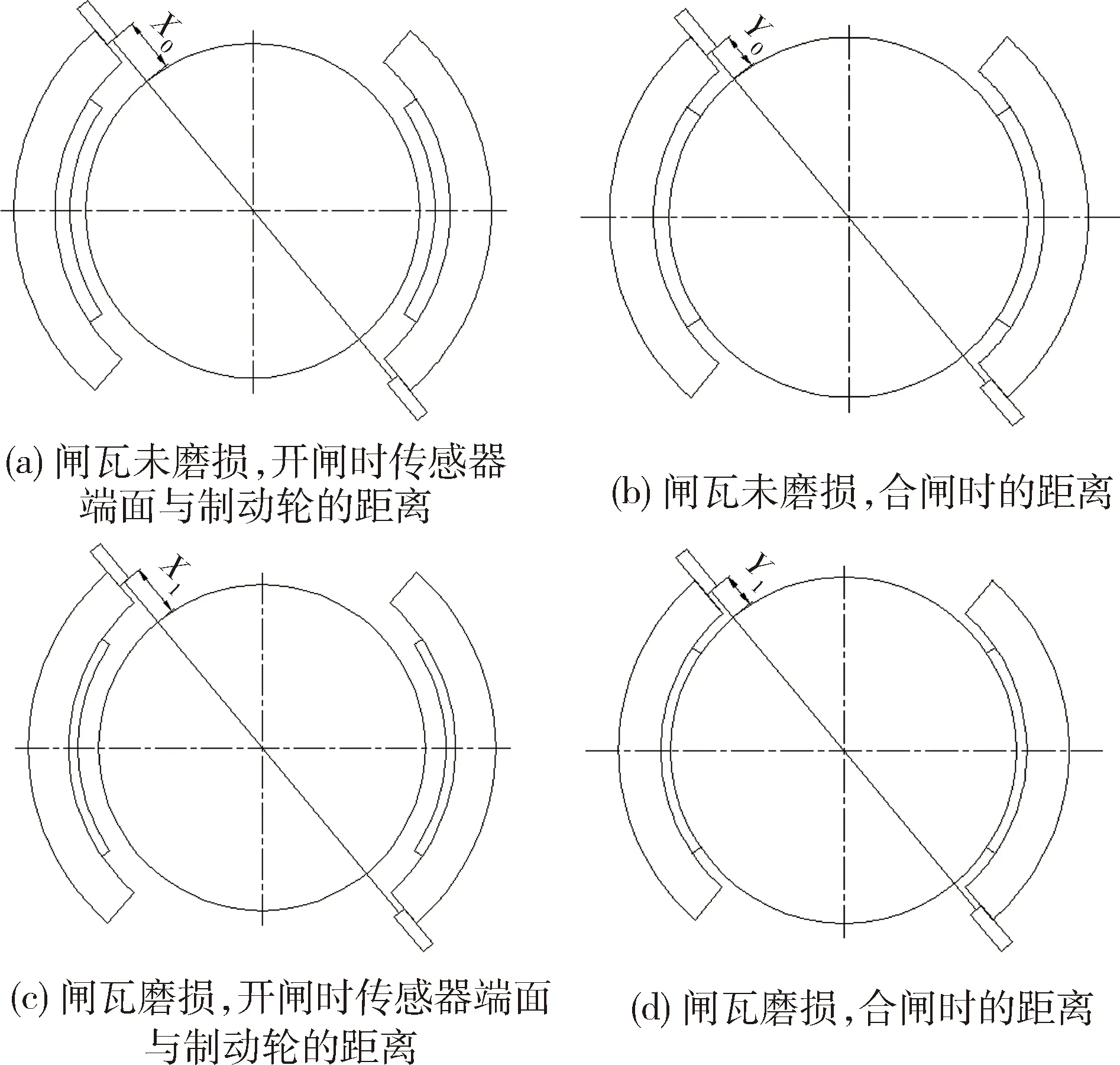
图2 电梯制动器抱闸间隙及闸瓦磨损量的测量方案
采用旋转编码器测量制动距离,当电梯开始制动时,假设θ为制动过程中制动轮转过的角度,R为曳引轮半径,i1为减速箱减速比,i2为曳引比,最大允许制动距离为L,则依据式(3)可计算出制动距离。当S>L时,上位机进行制动距离异常报警。
(3)
1.2 电梯制动器智能监测系统整体设计方案
电梯制动器智能监测系统采用“上位机+下位嵌入式控制器”的设计方案,整体功能框图如图3所示。上位机可以实现数据存储和故障预警,下位嵌入式控制器包括CAN BUS通信模块、电压采集模块、电流采集模块、A/D模块、掉电数据存储模块(EEPROM)、编码器信号接收模块。上位机与下位嵌入式控制器之间通过CAN USB连接。
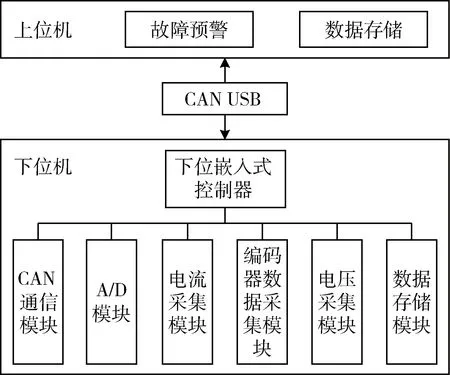
图3 电梯制动器智能监测系统功能框图
2 电梯制动器智能监测系统硬件设计
下位嵌入式控制器选用32位内核的STM32F407作为主控芯片[5],STM32F407最高工作频率可达168 MHz,外设资源丰富,计算能力强,可以使用DMA操作。根据应用需求和硬件资源,控制器规划3路A/D通道,包含1路掉电数据存储通道、1路编码器数据采集通道和1个CAN BUS接口,另外,预留数字信号采集接口和输出接口以备后续升级使用,电路原理图如图4所示。
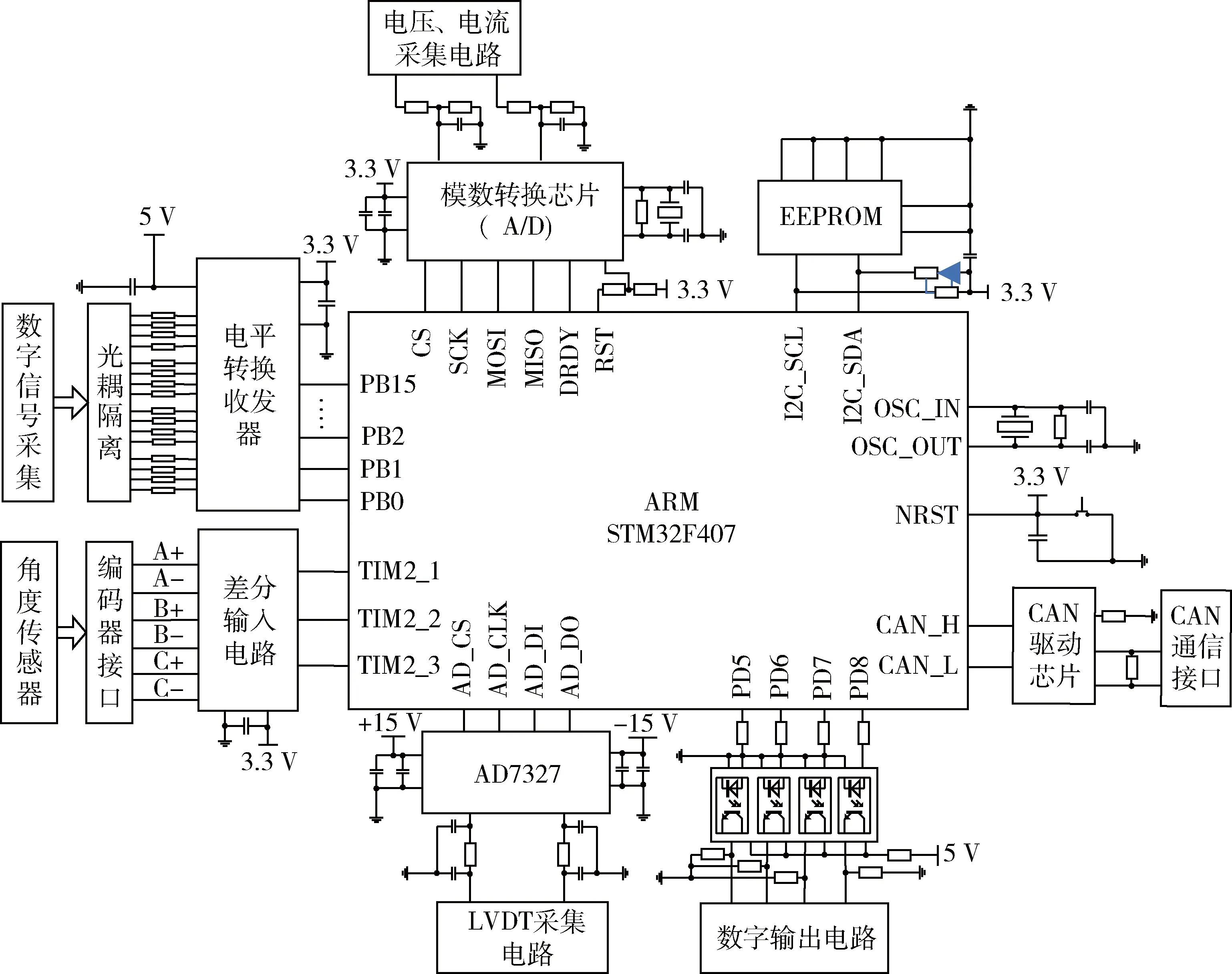
图4 下位嵌入式控制器电路原理框图
2.1 电梯制动器制动轮与闸瓦间隙测量电路设计
电梯制动器智能监测系统测量制动轮与闸瓦之间间隙采用LVDT传感器测量,LVDT信号是由专用AD698芯片处理的[6],此芯片的应用也是该电路的核心部分。AD698是美国Analog Devices公司生产的单片式线性位移差分变压器(LVDT)信号调理系统。AD698与LVDT配合,能够高精确地将LVDT的机械位移转换成单极性或双极性的直流电压。AD698采集LVDT传感器信号的电路设计原理图如图5所示。
AD698将位移信号转化成双极性的直流电压信号,模数转换芯片AD7327对AD698转换过来的电压信号进行采集变为数字信号与监测系统的控制器进行通信。AD7327是美国Analog Devices公司生产的AD芯片,具有500 KSPS采样速度。AD7327采集位移的电路设计原理图如图6所示,其OUT_SIGB信号是图5中AD698的输出信号。
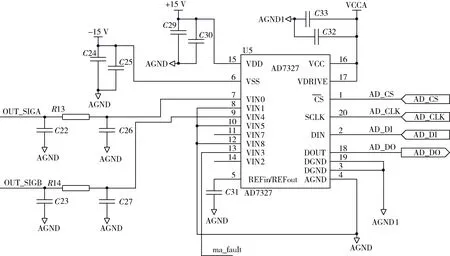
图6 AD7327采集位移转换后电压的电路设计原理图
2.2 编码器信号采集电路的设计
电梯制动器制动距离采用旋转编码器测量,本文选用STM32F407具有32位计数器的TIM2编码器模式,接口芯片选用差分线路接收器AM26LV32,电路原理图如图7所示。
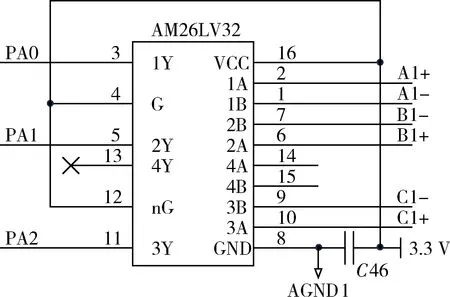
图7 编码器信号采集电路设计原理图
3 电梯制动器智能监测系统软件设计
制动器智能监测系统上位机应用软件基于Microsoft VisualStuio2010环境开发,使用C#语言编写[7],通过CAN USB与下位嵌入式控制器进行数据交换,实时接收下位机传输的数据,接收到故障数据后在界面上进行故障报警。下位嵌入式控制器软件采用任务模块化的设计思想,基于Keil μVision4环境开发,使用C语言编写,STM32F407中嵌入μC/OS-II实时操作系统[8],程序设计主要包括IO、外设、操作系统初始化,制动器信息采集任务创建,制动器状态监测任务创建,数据存储任务创建,故障预警任务创建。任务模块调用程序有任务优先级和调动任务模块、数据处理计算任务模块、数据转换通信任务模块、故障预警上报任务模块,并引入一定的软件抗干扰测试等。该设计系统的各个任务独立工作,互不干涉,可实现准时且无误任务调度、中断,简化了软件框架的设计工作,扩展性强。制动器智能监测系统的主程序流程图如图8所示。
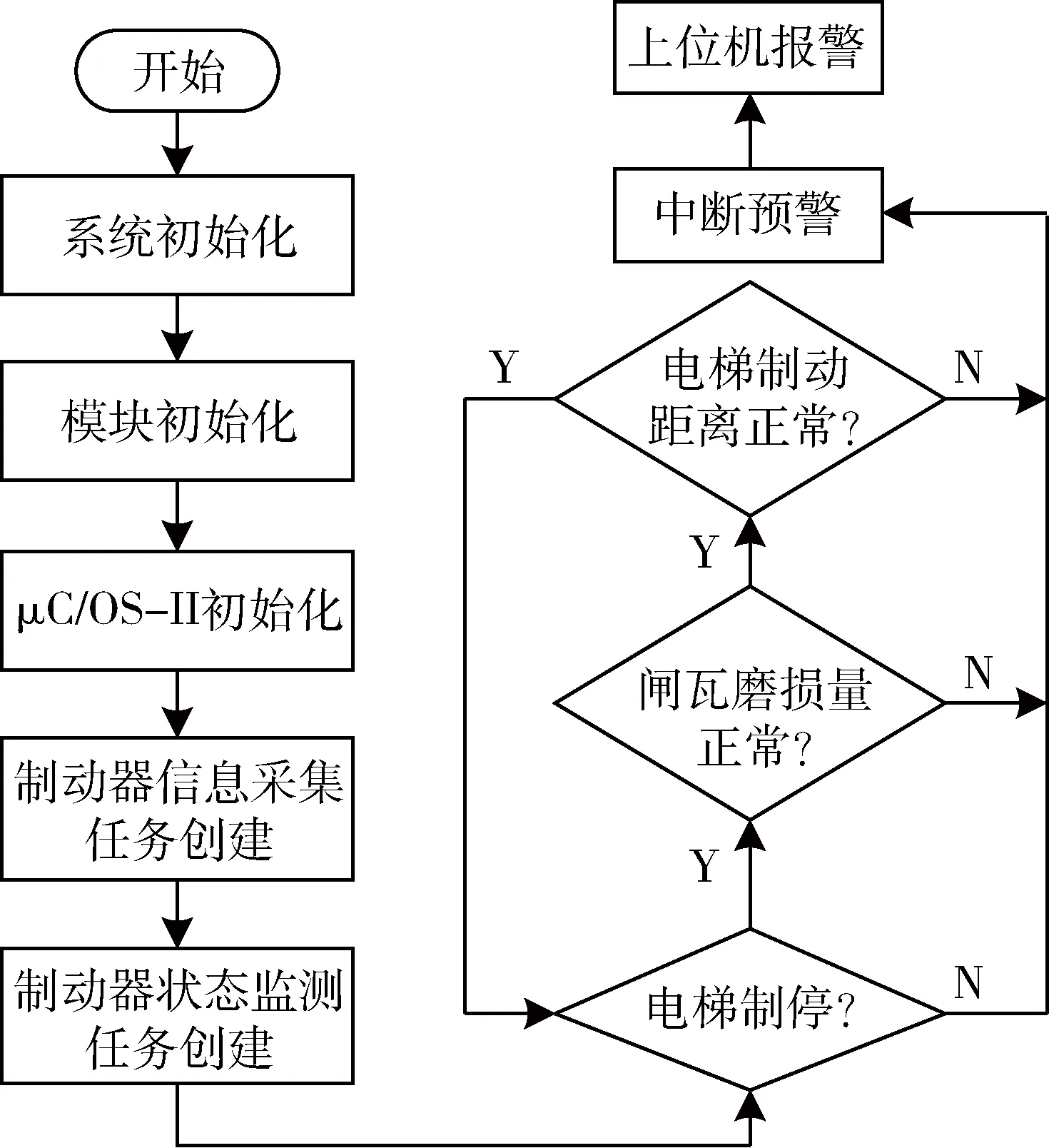
图8 软件流程图
4 结论
现代社会的电梯使用保有量逐年增加,随之电梯事故频发,电梯安全性和可靠性备受关注。制动器故障是诱发电梯溜车、蹲底、剪切冲顶等各类电梯事故的主要原因之一。本文研制的制动器智能监测系统,采用非接触式测量制动距离的方法,设计了基于ARM芯片的监测系统硬件,重点介绍了制动距离信号采集电路、模数转换电路的关键性硬件设计电路原理图,结合μC/OS-II嵌入式操作系统
的软件设计,在实验室条件下运行,有效地解决了现有安装繁琐、通信规约、监测费用高等问题,为电梯制动器的智能监测系统发展提供了新的途径。电梯制动器智能监测系统应用于某电梯机房中,安装方便、工作稳定,能够达到预期设计目标。
猜你喜欢
机电信息(2022年9期)2022-05-07 01:54:11
江苏安全生产(2021年9期)2021-11-27 08:08:28
铁道车辆(2021年5期)2021-11-09 04:31:04
城市轨道交通研究(2021年7期)2021-07-21 03:08:16
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
中国特种设备安全(2019年3期)2019-04-22 05:05:32
大连交通大学学报(2018年1期)2018-03-21 01:05:05
汽车科技(2015年1期)2015-02-28 12:14:42
