天基空间碎片远距离广域探测识别与跟踪技术
2019-09-15 12:17:06钟红军张俊梁士通王龙
空间碎片研究 2019年4期
钟红军,张俊,梁士通,王龙
(北京控制工程研究所,北京 100190)
1 引言
天基探测与感知技术是目前制约我国近地轨道资源开发和防护的关键技术,对空间碎片监视、碰撞评估分析、空间情报收集等极具研究价值和军事意义。欧美等国家自上世纪70年代开始,制定了较为详细的空间目标探测计划,建立了较为完备的态势感知体系,部署了具有作战实力的各类攻防武器[1],我国太空资源安全已经面临前所未有的挑战。
2000年以来,美国天基感知与逼近侦察等攻防技术发展迅猛,各类尖端装备齐上,实践领域已经从地基拓展到天基,性能指标、功能上均优越于我国,并部署了SBSS系列卫星、ORS-5卫星等低轨监视卫星以及GSSAP卫星、EAGLE卫星等高轨监视卫星,建立了地基—天基全局感知体系以及正在开发的临近感知体系,能够覆盖所有轨道空间的所有目标,包括碎片、卫星、导弹、近地目标等,具有优异的近程接近操作和远程感知能力[2]。
空间目标探测正向着更小、更暗、更精、更专、效率更高的方向发展。碎片观测尺寸低轨道从10cm向1cm、高轨从50cm向10cm发展,跟踪精度低轨道从500m向10m级发展、高轨道从10km量级向500m发展[2]。空间目标探测已在以下技术方面取得了创新性发展:
(1)增强探测能力模式的大规模应用
MSX可见光探测器采用了多CCD拼接方法,将视场从单个的1.4°提升到6.6°,可将捕获时间延长为原来4倍,提高了目标捕获成功率。SBSS采用万向架机动方式,可实现3π视场的捕获能力,将对GEO卫星的跟踪能力提升50%以上。STARE采用纳星星座技术,能够将10cm大小的碎片交会概率评估提升到99%,24h内的碰撞虚警率降低2个数量级。
(2)多种平台的协作与共享策略
2000年以前,对于LEO≥10cm、GEO≥1m空间较大碎片和卫星的观测、编目主要依靠地基雷达和光电设备完成。2000年以后,随着天基平台的广泛建立,逐步搭建了广域监视告警系统,将访问时间最短缩到24h内,最慢可在几天内完成捕获[3,4]。特别是近年来,HST、WISE等天基望远镜助力态势感知,可对极暗弱的空间目标进行探测,太空监视网逐渐覆盖1mm目标,填补了以前的空白。国际空间站等大型空间设施为避免微小目标的频繁碰撞,装备了专属的SDS系统,可对周围的目标进行全域感知,大幅提升了空间站的安全系数。专属监视载荷的部署为我国空间站的安全发展提供了重要材料。
(3)核心算法上的级联式突破
经过多年的技术积累,欧美在不同观测模式下星点提取取得突破。包括恒星跟踪和目标跟踪模式。对于恒星跟踪模式,积分时间长短决定了观测目标为点状或带状形貌,对于目标跟踪模式,积分时间长短决定了恒星为点状或带状形貌[5,6]。两种模式在处理暗弱目标观测提取时尤其如此。
(4)算法的硬件化加速了产品迭代流程
除使用FPGA做图像预处理[7-9]、星点提取等模块,P.C.Zimmer在使用sCMOS提升探测能力同时,提出GPU加速技术通过并行处理多帧多区域数据[10],加快了实时处理,表明使用GPU技术后,在理论信噪比极限20%以内的目标几乎可以全部实时处理。
(5)特性测量研究的深入与工程化发展
“探”与“测”仅是态势感知的第一阶段,即采用各种测量手段,地基或天基,光电或雷达等,实现对空间目标的探测、跟踪与识别,在此基础上,基于空间动力学和运动学理论,实现空间目标的定轨与编目,开发对应设备和方法,建立目标数据库,为航天器防护、碰撞预警、在轨服务等提供支撑; “感”与“知”是态势感知的第二阶段,也是主要目的,即综合各种测量手段,进行数据融合,实现对目标特性的详尽分析与高阶测量,积极搜集对战场极具价值的情报信息,对保护轨道资源、进行精确打击意义重大,也是空间力量 (太空攻防体系)进入实战的有效前提。目前光度学与位置测量的结合,光谱学与光度学的互相配合等,实现了目标特性的定量捕捉、反演解析功能,BRDF的辐射定标技术使得解析未知目标特性成为常规例程。这也是近年来国外研究的热点和亮点问题。
对于空间中的暗弱目标,提升探测能力需要提高相机的探测灵敏度,提升探测范围需要提高相机的探测视场。随着视场和灵敏度的大幅增加,探测相机图像中背景恒星和空间目标的数量指数级增加,导致图像和数据在轨实时处理的难度指数级增加;反过来说,由于相机在轨图像和数据处理能力的约束,也限制了相机探测视场和探测灵敏度的进一步提升。
本文面向航天器在轨探测、预警和规避等需求,针对目前空间碎片探测效率偏低、探测范围和探测能力有限的问题,设计了一种天基空间碎片远距离广域探测、识别和跟踪方案,提出了一种背景稠密恒星和空间目标同步捕获和跟踪方法,用于解决大视场下稠密星云背景下的空间目标实时提取和跟踪的关键问题,阐述了系统方案,分析了系统指标和关键技术,并仿真了系统数据处理能力。
2 任务特性分析
2.1 任务需求与指标分析
LEO轨道目前集中了全球90%的碎片和70%的航天器,在太阳同步轨道上装备若干颗卫星,通过多视场衔接的方式实现整个轨道空间目标的观测、定轨已经成为目前的共识策略,优势在于:
(1)弥补单个视场盲区。对于单一视场体制,只能将视场之内的目标捕获到,可观测天区一般对应某一历元某一天区数据,目标的随机向量运动决定了难以采用定向捕获方式。
(2)目标不同历元数据累积的需求。使用开普勒定律直接定轨,其定轨精度受制于模型误差和数据采样点数目和质量,模型误差主要包括太阳光压等各种摄动因素、运动目标自身的机动变换,数据采样点数目,主要指整个轨道在天球坐标系的采样数目,数据质量主要取决于探测相机自身的各种误差,数据采样点的相关特性。一般短时的采样数据具有较高的冗余度,在某一方向的精度较高,其他方向则含有较大误差。
(3)提升观测效率和质量的关键因素。天球坐标系下,平台自身、碎片或航天器目标遵从同一引力定律,由太阳方向变化导致的运动目标轨道不一,单一视场覆盖的可见弧段较短,观测效率难以提升。而多个视场优化后,可保证整个轨道范围内,目标皆能超过探测器灵敏度,实现多次观测的目的。
因此,近几年主要的目标是突破大视场覆盖技术、高灵敏度探测和处理技术、跟踪及识别技术,研制相关样机并在轨验证,达到如下目标:①目标大小:LEO≥10cm;②探测距离:1400km;③48h反应机制;④预警功能。
为可探测1400km、10cm目标 (对于600km轨道卫星,可探测2000km的低轨目标),设计了以下系统指标:
① 单个探头视场:15°×15°;
②探头数量:9个;
③ 子系统视场角:45°×45°;
④ 更新率,多档可调:0.5Hz、1Hz、2Hz;
⑤探测能力:≥13Mv。
探测能力主要是由探测距离、可探测目标尺寸和平台轨道决定,目前设置为13Mv。系统采用多头探测体制,主要借鉴了STARE和SBSS演示验证星的相关技术,不仅达到视场覆盖的目的,也可方便头部相同目标的证认、随访等特性。单个探头视场为15°,在探头数量和视场大小之间达到平衡,保证既能捕获目标,又为实际图像的处理留够足够的空间。量化参数主要考虑探测器的精度等指标。更新率主要适应不同曝光率,可对不同距离的目标进行针对性探测。
2.2 目标特性分析
(1)空间目标特性
空间碎片在轨运动时,周期地经过日照区和地球阴影区。在日照区,空间碎片主要受到太阳辐射、地球反射、地球辐射等影响,其中太阳辐射起主要作用,可见光波段观测具有较大优势;在阴影区,则主要受地球辐射的影响。空间碎片在轨道不同位置受到的辐射是不同的,而其温度也随之改变。在阴影区,空间碎片的平衡温度约为150K;在日照区,空间碎片的平衡温度约为300K。根据维恩位移定律可知,当黑体温度为300K(空间碎片日照区温度)时,峰值波长在9.7μm附近;当黑体温度为150K(空间碎片阴影区温度)时,峰值波长在19.3μm附近。
空间碎片按尺寸大小,有如下分类:
1)大尺寸空间碎片——尺寸为米级及以上空间碎片,包括报废的卫星整体,使用过的火箭末级残荷。由于尺寸较大,该类空间碎片具有较高的能量和破坏力,能被地面观测设备直接探测。
2)中等尺寸空间碎片——尺寸介于毫米级与分米级的碎片。这类碎片大多由于航天器爆炸解体,或之间碰撞所产生。由于尺寸较小,很难被地面观测设备直接探测。
3)小尺寸空间碎片——尺寸在毫米级以下的空间碎片。如航天器表面剥落的油漆碎片,或发动机喷射的固体燃料粉末。虽然碎片质量很小,但是空间碎片的主要组成部分。
(2)探测距离与星等的关系
相机通过光学系统将空间目标成像于光电转换器上,输出信号经过A/D转换送数据处理单元,经星点提取和星图识别,确定相机光轴矢量在惯性坐标系下的指向,通过相机在飞行器、星光导航系统及舰船上的安装矩阵,确定其在惯性坐标系下的三轴姿态。恒星静止不动,空间目标相对卫星运动,基于相机中恒星和目标的相对运动状态可以监测空间目标。空间目标的等价星等可通过下式得到:
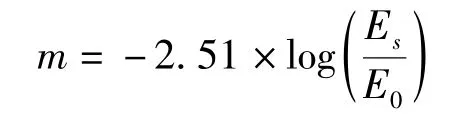
其中,Es为目标反照的太阳的能量,E0为零等星的能量。
绝大部分低轨碎片目标位于800km和1400km两个高度[11]。卫星轨道高度600km,探测距离为1400km,则最高可探测2000km的目标,即可实现300~2000km空间目标的覆盖探测。目标的亮度特征与距离有关,目标0.2反射率,可获得目标探测距离与星等的关系如图1所示。
(3)目标相位角与星等的关系
亮度特征与距离有关,假设卫星轨道高度600km,空间目标尺寸为10cm,目标反射率0.2,固定距离L=1400km,目标相位角与星等之间的关系如图2和表1所示。

图1 空间目标在观测相机处探测星等与距离的关系Fig.1 Relationship between magnitude and range of the space target detected at the space observation site

表1 目标相位角与星等之间的关系Tab.1 Relationship between solar phase angle and magnitude of space target
由图2可知,在目标相位角从0°变化到60°范围内,目标星等逐渐从12.28Mv上升到13.04Mv,因此为保证大部分时间目标可见性,探测灵敏度设计为13Mv。
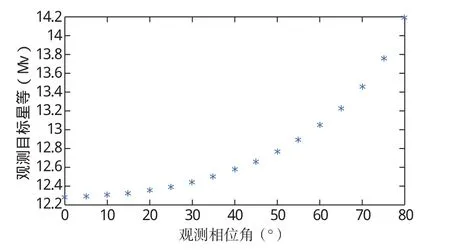
图2 空间目标在观测相机处探测星等与观测相位角的关系Fig.2 Relationship between magnitude and observation phase angle of the space target detected at the space observation site
(4)目标探测数量与视场角的关系
图3为低轨空间目标大于10cm的数量分布图。由图3可知,800~1000km和1400~1600km有两个峰值,其密度超过1000个/km3。

图3 空间目标在近地轨道空间的密度分布Fig.3 The density distribution of space objects in LEO space
对于一定目标距离,其可探测数量为目标密度×视场角×目标所占体积,由此可以推出,不同轨道高度的观测平台,随其观测距离远近的可观测目标数量。
以下分别计算了平台轨道在600km、800km、1000km,观测距离分别为0~1400km,单个探测相机15°视场内可探测目标的数量,如图4所示。
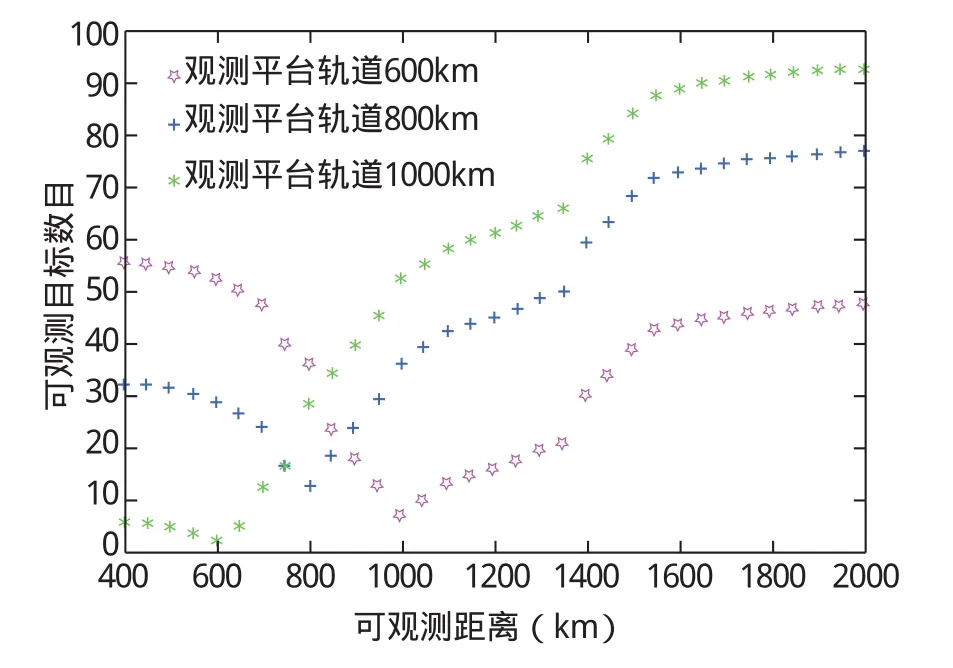
图4 不同观测轨道可观测空间目标数量 (FOV=15°)Fig.4 The observable number of space objects in different observation orbits(FOV=15°)
由图4可知,对于600km观测平台,不考虑地球阴影影响,其向轨道内观测时,可观测目标数量从2到6,向轨道外观测时,可观测数量大幅增加,当观测距离达到1400km时,可观测目标数量92个。对于800km观测平台,可观测目标数量由近至远为12~73颗,对于1000km观测平台,可观测目标数量由近至远为6~56颗。
当距离从0km增加到1400km时,观测数量呈递增趋势,由于1600km外空间目标较少,到轨道高度1600km处可观测数量达到峰值,继续增加探测距离,可观测数目增加较少。
2.3 背景恒星分析
任务需求给出了探测链条能够探测和处理的目标星等,结合设计参数,可以确定单个视场内可观测目标的密度。以目前的灵敏度 (13Mv)、视场 (15°)估计,像平面所包括最高星数约25000颗,如表2所示。对于6K×6K的探测器,单星平均所占像元数约1500个像元,可以预知,像平面将充斥大量恒星,背景不仅包括暗黑的天空背景,还包括由恒星散射光造成的整个像面的不均匀分布,这对恒星目标的提取、剔除,进而捕获目标提出重大挑战。
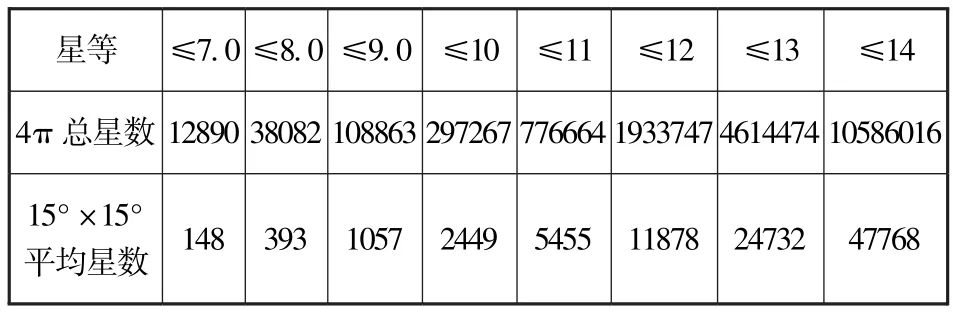
表2 背景恒星数量与不同探测星等和视场之间的关系Tab.2 Relationship between the number of background stars and different magnitudes and fields of view
3 系统方案
3.1 总体方案
对系统探测灵敏度、探测精度、探测效率三大因素进行综合分析,提高探测灵敏度和探测精度,将极大约束视场大小,而探测效率迫切要求视场具备较大面积覆盖。
在总体资源有限情况下,根据项目技术指标需求,确定以下总体实现方案:
(1)单探头采用大视场15°,提高单视场的探测范围;
(2)多探头采用多视场的拼接技术,实现视场之间的广域衔接与关联覆盖问题;
(3)探测器采用sCMOS实现高灵敏度探测;
(4)背景稠密恒星和空间目标的同步捕获和跟踪方法;
(5)使用FPGA和GPU联合实现焦平面的高性能探测与提取问题。
3.2 高灵敏度探测技术
3.2.1 焦平面功能选型
焦平面功能方案包括单探测器方案和多探测器方案。多探测器拼接方案一方面可以提高探测分辨率和目标探测精度;另一方面可将探测器分为几个不同部分,进行不同的成像和处理功能划分,如将探测器分4块,其中1块主要用于姿态估计,其余3块主要用于恒星跟踪,如图5所示。第1块姿态估计模块可设置较短的积分时间,主要用于惯性姿态确定和恒星背景的确定,探测灵敏度较低,在完成处理后,可以提供精确的局部天区星表和预测坐标,简化其余第2~4块探测器的信息提取。第2~4块探测器的积分时间相对较长,达到空间目标的探测灵敏度,利用惯性跟踪技术,直接提取恒星背景和空间目标。探测器固定安装关系可地面进行标定,得到各探测器像面相对其他探测器像面的参数。
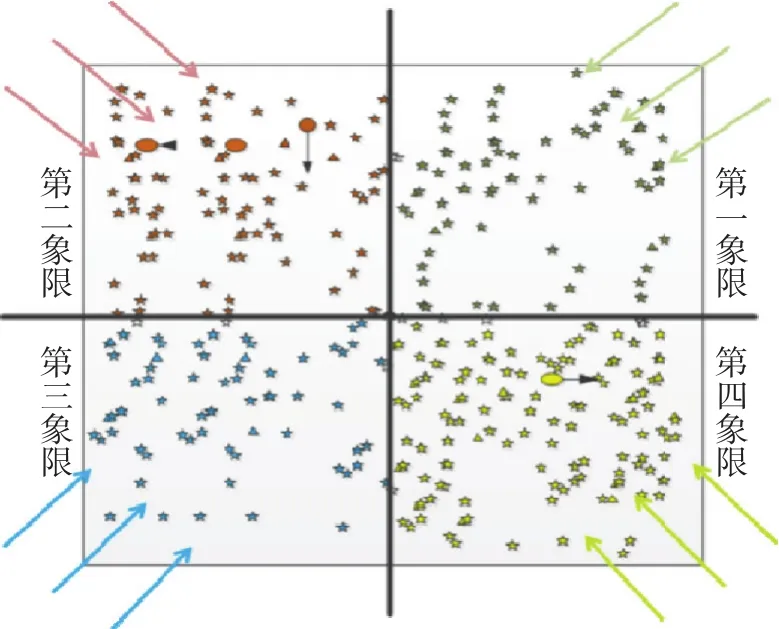
图5 焦平面姿态功能示意图Fig.5 The attitude diagram on the focal plane
为了简化系统方案、降低相机工程实现难度,本文选用了单探测器方案,选用大面阵高分辨率高灵敏度探测器,辅以本文提出的背景恒星和空间目标同步捕获和跟踪技术,完成惯性姿态计算和空间目标探测。
3.2.2 探测器选型
可见光探测相机可选择的低噪声探测器主要包括以下几类,其优缺点参见表3。
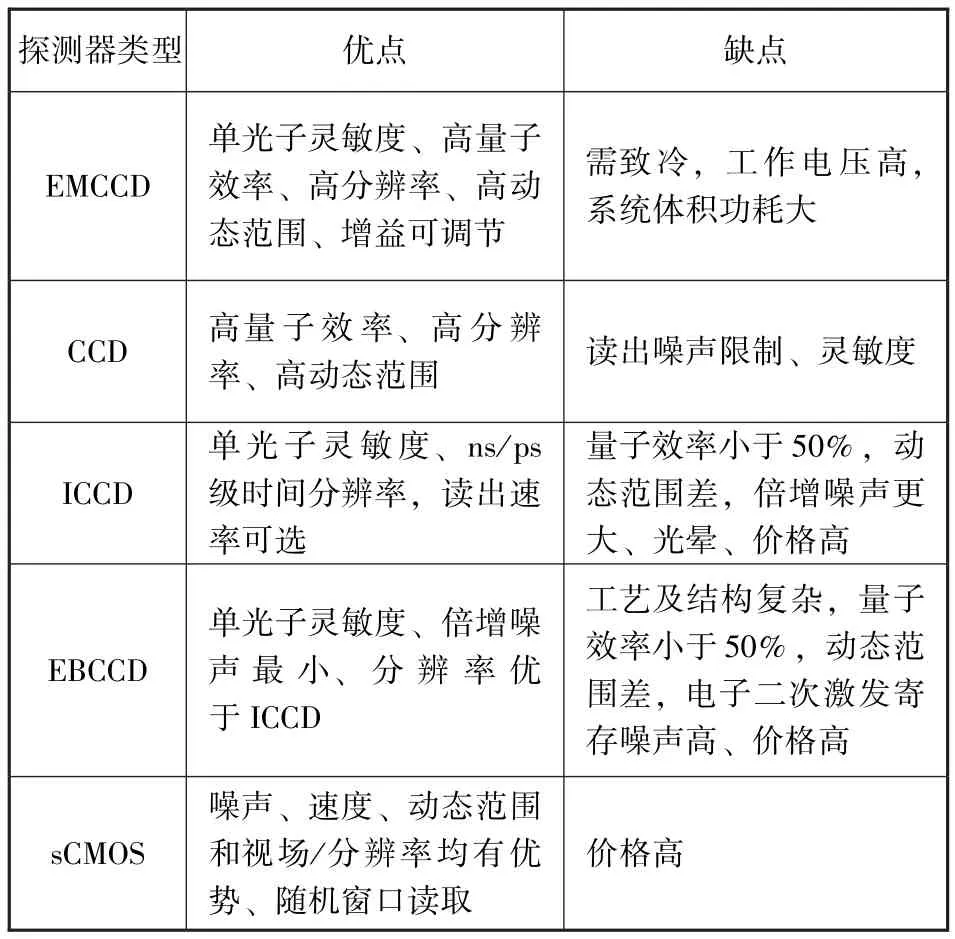
表3 几类高灵敏度探测器比较Tab.3 Comparison of several high sensitivity detectors
EMCCD通过一个芯片级联放大机制,实现硅体中的光电子倍增,最终可获得极低的读出噪声,读出噪声与读出速率无关,可工作于高帧率模式。忽略热噪声,若将EMCCD等效为常规CCD器件,其读出噪声可低至0.1e。EMCCD需致冷,工作电压高,系统体积功耗大。
ICCD主要通过像增强原理提升探测灵敏度。像增强器的光阴极将光转换为电子后,电信号经过电场加速进入微通道板,在微通道板的光纤通道内,电子经过不断的撞击倍增后打在荧光屏上,重新激发出光子图像,最终由中继元件再次经光电转换为电信号成像在CCD上。ICCD属于真空器件,易损坏,不易小型化,寿命短。
EBCCD不同于ICCD,以背照式CCD替换了内部的荧光屏及后续组件。其工作原理是入射光子经光学系统直接照射在光阴极上生成电荷,电荷经加速入射在CCD上,形成电子轰击效应,从而实现对光信号的放大。但是在10~20keV电子轰击下会产生辐射损伤,使得暗电流增大,转移效率跟着下降,寿命较短。
sCMOS技术是目前为止性能最佳的技术,在噪声、速度、动态范围和视场/分辨率均有优势。如5.5M像素的sCMOS传感器可提供一个大的视场和高分辨率,在30f/s情况下,sCMOS读出噪声RMS<2e,在100f/s下读出噪声RMS<3e。
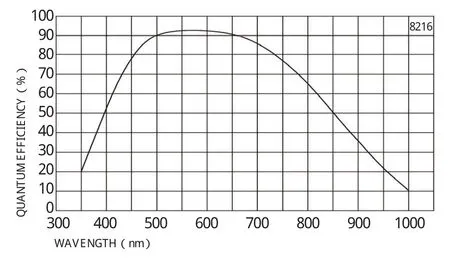
图6 sCMOS的QE曲线Fig.6 QE curve of sCMOS
由于探测目标数量巨大,在通光孔径有限的条件下,实现13Mv的高灵敏度,因此选用了高灵敏度大面阵sCMOS器件,像元分辨率6144×6144。前述仿真表明,当通光孔径160mm,焦距233mm,探测灵敏度可实现13Mv,信噪比SNR优于3。另外,积分时间设置5~250ms可调,以适应低轨探测目标的高相对运动速度。
3.2.3 基于FPGA和GPU的流水线处理技术
FPGA是一种可编程进行功能定制的半成型数字电路器件。FPGA内部包含数量众多的逻辑门电路和专用资源,可通过编程定制字功能。FPGA器件与DSP器件对比,可以通过并行结构完成数字信号处理功能尤其擅长大数据吞吐量、计算等。DSP+FPGA的硬件系统架构,结合了DSP开发维护方便、性能优越和FPGA可并行高速处理的特点,在星敏感器中得到广泛应用。
为解决更高灵敏度在线处理问题,GPU具有大容量并行处理能力,已经广泛应用于目标探测和态势感知领域。GPU特点:(1)当出现多个探测单元时,GPU可分核处理每个单元;(2)当出现大规模并行运行程序时,可分线程处理。
按照目前在导航星敏感器的设计经验,我们采用如图7所示的技术路线实现动态目标的提取、识别与跟踪。其中,FPGA完成整幅星图的预处理、点源提取等任务,GPU技术主要功能是处理复杂耗时的算法,完成姿态识别和运动目标的捕获跟踪。高精度高效率星表设计将协助多目标识别与跟踪模块实现真实运动目标的识别。
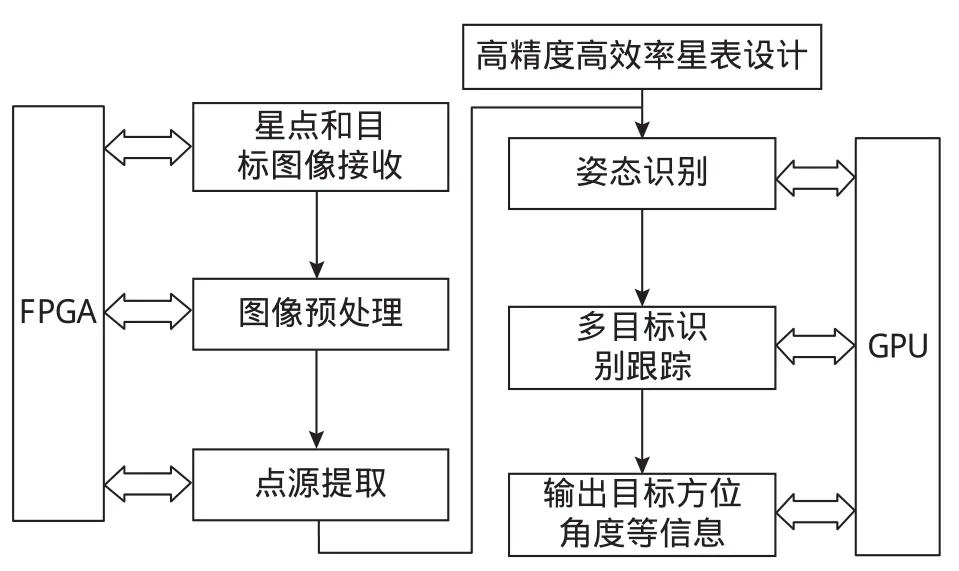
图7 目标探测和识别系统算法实现流程图Fig.7 The algorithm realization flow chart of space target detection and recognition system
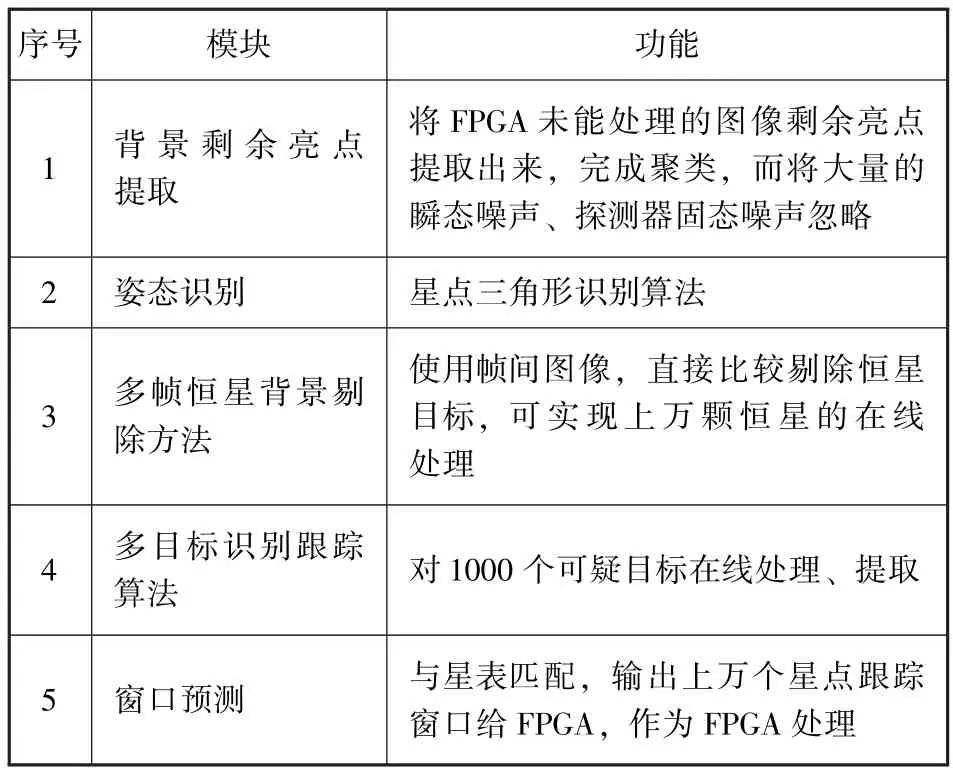
表4 目标探测和识别系统GPU算法模块Tab.4 GPU algorithm modules of space target detection and recognition system
3.3 同步捕获与跟踪技术
运动目标的成像特性与恒星相同,在单帧图像中可提取,但无法识别,只能通过多帧比对,根据目标相对于恒星背景运动的信息进行识别和分类。识别、分类算法包含以下3个部分:
(1)图像预处理;
(2)恒星惯性姿态模式;
(3)碎片探测模式。
背景恒星和空间目标的常规探测和跟踪流程图如图8所示,对于大视场高灵敏度探测,图像中背景恒星数量已达25000颗,将图像中的背景恒星剔除计算量巨大,难以实时完成,目前采用图像压缩下传方式,地面进行事后处理分析。由于卫星存储量和下传数据通道的限制,导致在轨探测数据利用率较低。
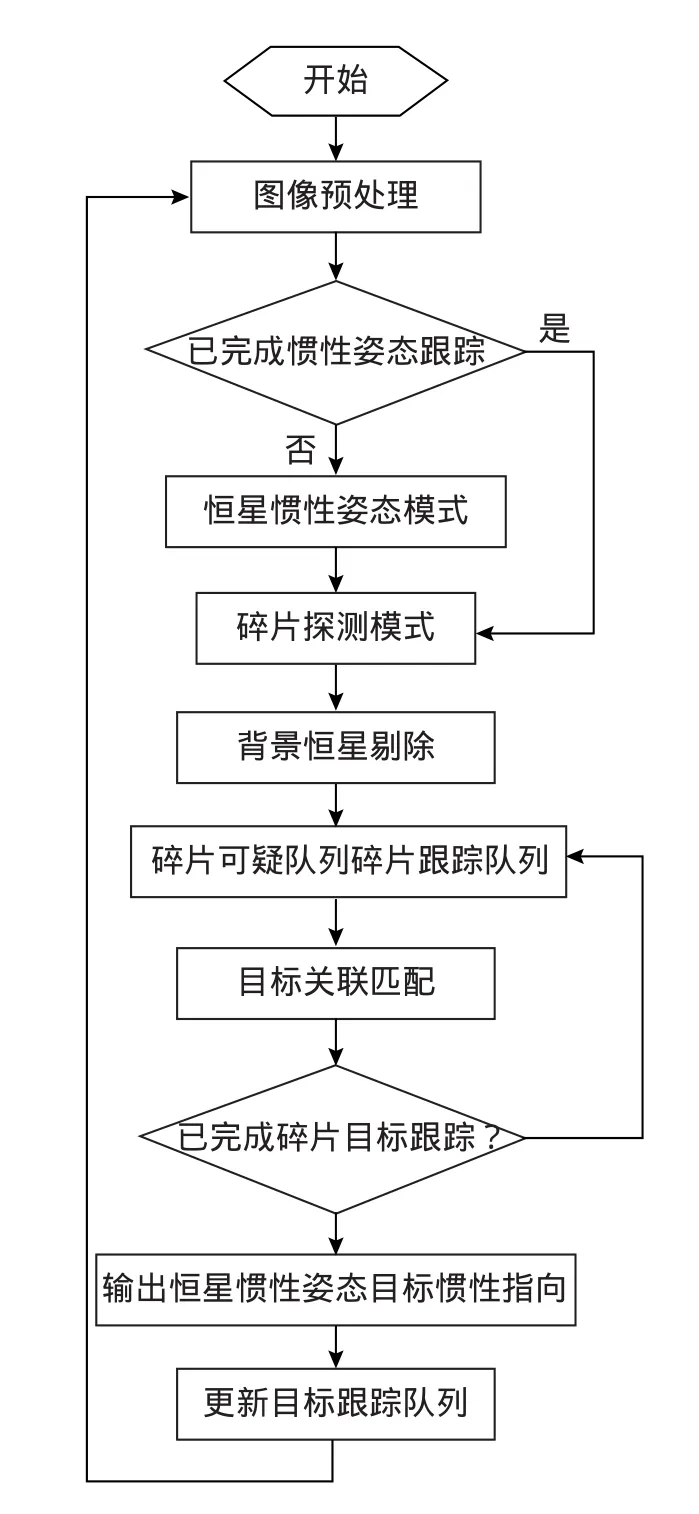
图8 目标探测和跟踪常规处理流程图Fig.8 The routine processing chart of space target detection and tracking
本文提出了一种目标同步捕获和跟踪新方法,其流程见图9。将图像像面分为上一帧图像的原跟踪区域和新的图像探测区域,在原有已探测区域中,采用目标的窗口跟踪模式;在新探测区域进行全图捕获搜索,采用硬件技术实时提取内部的亮点,完成疑似队列的建立和新进入视场的运动目标捕获,大幅减少目标图像提取时间。在惯性空间姿态计算方面,仅跟踪计算预先选定的极少量背景恒星,大幅降低稠密背景星云的干扰和影响,减小数据处理量。
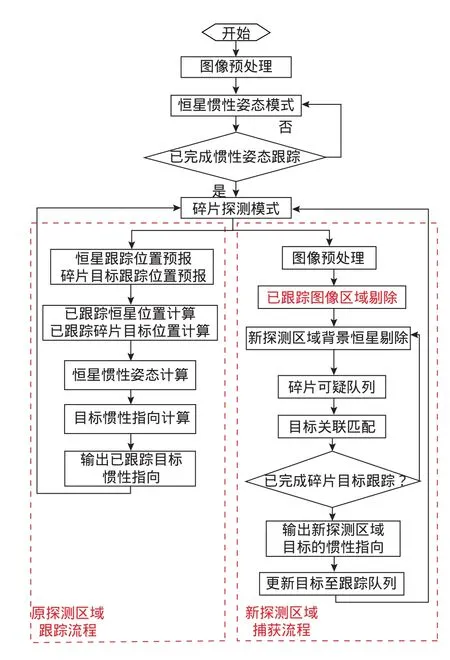
图9 本文提出的目标同步捕获和跟踪方法流程图Fig.9 The flow chart of synchronous method for space target acquisition and tracking proposed in this paper
在系统上采用FPGA完成图像的硬件化处理,将新探测图像区域的捕获流程与原探测区域的跟踪流程同步并行化处理,提高处理的实时性。设卫星在轨运动角速度为0.06°/s,探测相机视场15°×15°,数据更新率为1Hz,相比常规全图处理流程,采用本文提出的改进同步处理流程,可将图像捕获搜索的处理数据量降为原有数据量的4‰,将捕获搜索的背景恒星数量由25000颗降为100颗,具有在轨实时数据处理的特点。
如图10所示,将像平面分为225块,每一块对应大致1°×1°视场范围。将进入视场的天区设为捕获区域,其他区域定为跟踪区域。当图像帧时间内运动速度为1°时,图示箭头块将作为捕获区域,其他区域为跟踪区域,具体区域大小可根据光轴角速度大小进行设置。

图10 像平面目标捕获和跟踪功能分配区域示意图Fig.10 The schematic diagram of allocation area for space objects acquisition and tracking on focal plane
3.4 多视场信息融合技术
3.4.1 多视场信息融合
针对视场目标衔接与关联覆盖问题,提出采用多头多视场拼接技术,提出多视场拼接方案。探测相机系统包含多个探测头部,会生成大量的背景恒星和微小空间目标信息,对各头部星图、背景星点、空间目标进行信息融合,实现各相机惯性姿态识别稳定、指向测量精度提升、空间探测目标在各头部连续识别跟踪不丢失的目标。包括光轴联合标校、多个头部目标信息融合、多目标数据关联跟踪等模块。
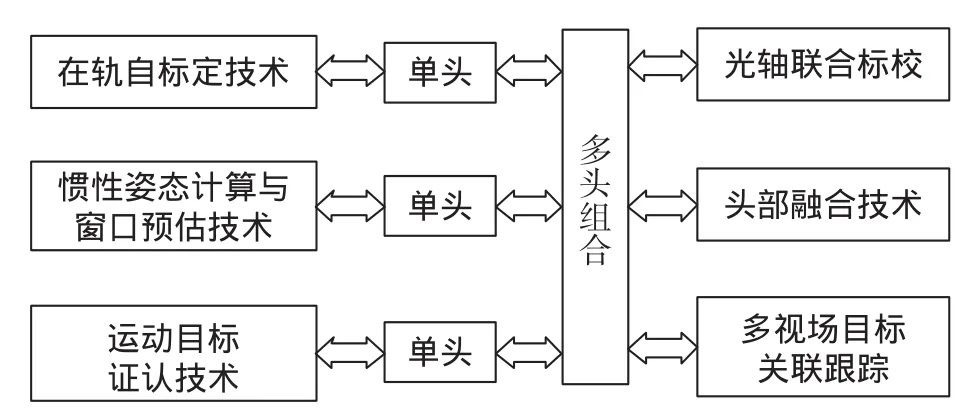
图11 多视场信息融合主要算法模块Fig.11 The main algorithm modules for multi-view information fusion
3.4.2 多视场布局与重叠技术
针对空间目标的随访问题,提出采用柵栏技术实现视场重叠与关联。采用多个卫星、多个探测相机方式实现广域视场关联和覆盖问题,提高空间目标的探测效率,提高目标定轨精度。
至少布局2个同轨道观测平台 (SA、SB),每个轨道平台布局至少2个头部 (SA-A、SAB、SB-A、SB-B),可实现如下指标:1.对同一天区重复观测 (如SA-A与SB-B结合),为空间运动目标的大弧段关联提供精确的方法,为实现几何定轨提供数据;2.能够对轨道面的目标不断巡访,提高目标的探测概率;3.多次观测之间预留足够的衔接,即叠加视场的方法,保证已经证认的目标能比较流畅地转入下一视场进行跟踪。
采用空间机动方式,可以实现对地球与太阳的阴影弧段,如栅栏A和栅栏B的观测,这样既提高了效率,也能在几何定轨方法后,计算栅栏A中运动目标在栅栏B的出没时间,实现多时段该目标的探测。
该技术结合扫描技术,包括平台万象架扫描和光路扫描,可逐渐覆盖整个3π立体空间,能够高效率探测运动目标。
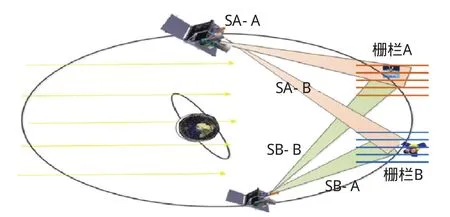
图12 多视场的布局与重叠方法示意图Fig.12 The schematic diagram of layout and overlapping method for multiple fields of view
4 仿真结果
4.1 目标硬件实时提取
为了提升相机数据处理实时性,使用FPGA完成整幅星图的预处理、点源提取等任务,仿真图像的背景恒星数量、分辨率等参数设置按照本项目总体参数设置。处理流程如下:
设原始灰度值为Grayi,j,计算得到区域图像阈值为meani,j+γσ,当Grayi,j>meani,j+γσ时,该像元为高亮像元,对其进行标记signi,j=1,其他未剔除的像元视为0。
为了便于简化分析和显示,仅列出2.1°视场范围内的图像处理结果,表5为提取像元数与提取星数之间的关系,图13、14为该视场范围内的目标提取效果。
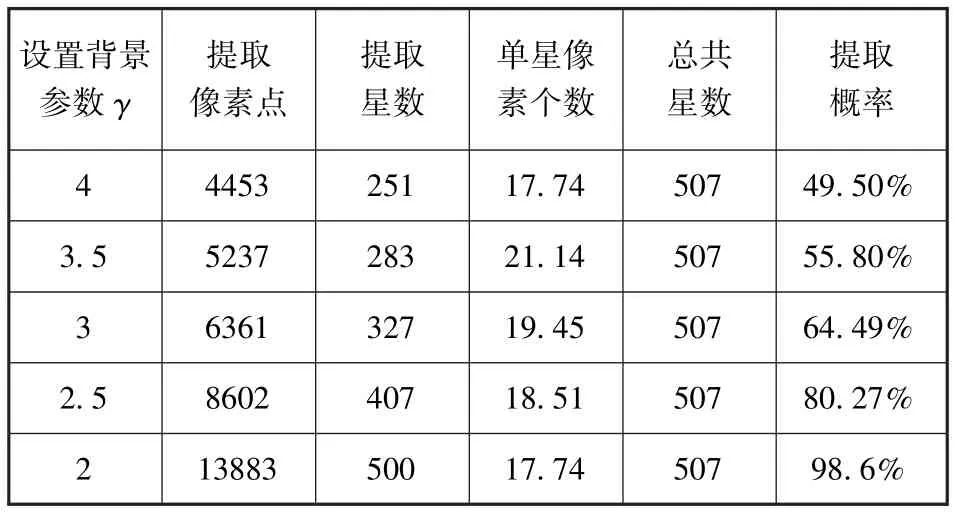
表5 背景参数与提取像素点提取星数关系Tab.5 Relationship between background parameters and number of stars extracted from the detected pixels

图13 γ=2,γ=4提取的效果图Fig.13 The extracted renderings with γ=2, γ=4

图14 空间目标的提取效果图Fig.14 The effect drawing of space object extraction
图14中,蓝色为提取全部的点状目标,红色为星表暗星 (13Mv),绿色为星表中亮于12Mv的恒星。当背景参数γ=2时,能将图中500颗恒星提出,提取成功率达到98.6%,说明FPGA硬件提取空间目标的方案可行。
当背景恒星为507颗时,FPGA共需要提取13883像素点才可满足提取要求,这对FPGA内部存储资源提出了重大挑战;后续在FPGA内部采取图像像素提取与点状目标提取的综合设计方法、可进一步降低FPGA像素点的数据存储需求。

图15 FPGA处理新目标进入区域所占面积比例和所耗时间Fig.15 The proportion of area and time for new target entering area during FPGA processing
在平台或图像运动情况下,像平面将有一部分区域为新目标进入区域,按前述要求,使用Matlab在PC机上模拟FPGA处理流程提取新区域的高亮像点,其处理新区域所占面积比率、提取像元数、耗时量参见图15。
由图15可知,提取的像素点数、提取的星点数与所占视场面积近似成比例增加,星点提取所耗时间与视场面积近似成平方关系。从分析结果看,FPGA仅对图像新探测区域的目标进行处理,是一种高效率处理办法。
4.2 目标识别与跟踪
(1)捕获与跟踪区域
为提高运算速度,由3.3节可知,可只需处理整幅图像的部分区域。仿真图像按15°×15°、5°×5°、 3°×3°、 1°×1°不同视场的星图见图16。对于不同的视场大小,软件提取像素点占比所耗时间和提取像素数参见图16。

图16 不同视场星图Fig.16 The star distribution of different fields of view
因此,为能尽快识别运动目标,应尽可能将新探测天区作为捕获区域,将视场驻留的区域设为跟踪区域。这样既能达到快速识别目标,又能快速跟踪运动目标,达到资源有限情况下目标的快速提取需求。
(2)目标疑似识别队列建立
图像预处理效果参见图17。其中左图为2°视场的原始图像,共有约496颗观测星,右图为疑似目标图像,有效提取的4个疑似目标中,其中1/2/3是真实的运动目标,可有效提取。

图17 左图:2°视场原始图像,右图:疑似目标图像Fig.17 Original image with 2°(left)and unresolved space targets(right)
(3)目标跟踪与分类
在相机视场内的空间目标可认为其做匀速直线运动,因此可以根据视场内目标的运动特性,采用窗口跟踪方式进行甄别。该跟踪方法的好处有二:①减少目标提取和识别计算量,加速目标处理实时性;②对于临界探测灵敏度目标,由于其亮度时亮时弱,导致提取时有时无,这些运动目标,可在有先验信息情况下保持关联,有效解决探测视场连续关联。
图18为使用同步捕获和跟踪算法提取的图像。可以看出,图中跟踪区域的6个已知目标已经有效提取。捕获区域中的左图4个疑似目标中,3个真实目标已全部识别,对于其他干扰点,则可全部滤除。

图18 识别和跟踪的目标及其轨迹Fig.18 The detected space objects and their trajectories
5 结论
本文设计了一种天基空间碎片远距离广域探测、识别和跟踪方案,提出了一种背景稠密恒星和空间目标同步捕获和跟踪方法,可将图像捕获搜索的处理数据量降为原有数据量的4‰,将捕获搜索的背景恒星数量由25000颗降为100颗,具有在轨实时数据处理的特点。可解决大视场下稠密星云背景下的空间目标实时提取和跟踪的关键问题,为空间目标图像和信息数据在轨实时处理提供了可行途径。
分别对不同的天基背景进行了仿真建模和地面观星试验,分析表明,提出的方法能实现实时提取背景恒星,能够100%地提取空间运动目标,滤除干扰因素,并做正确的轨迹关联处理。本文对未来建立和研制高效率空间探测和监视卫星具有重要参考意义。
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
空间科学学报(2020年6期)2020-07-21 05:37:04
空间科学学报(2020年6期)2020-01-08 16:50:22
环球时报(2019-12-05)2019-12-05 05:13:15
中国医疗设备(2019年1期)2019-01-15 12:10:54
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
奥秘(2018年10期)2018-10-25 05:38:56
激光与红外(2015年10期)2015-03-23 06:07:18
太空探索(2014年4期)2014-07-19 10:08:58