
医用回旋加速器高频控制系统设计
2019-09-14 02:05吴永存杨兴林石金水赵良超何小中
原子能科学技术 2019年9期
吴永存,杨兴林,石金水,赵良超,何小中
(中囯工程物理研究院 流体物理研究所,四川 绵阳 621900)
正电子发射断层显像(PET)是一种先进的核医学影像技术,实现方法是将正电子核素标记到某种参与体内代谢的物质上,形成放射性药物(也称显像剂、放射性示踪剂),其具有很高的灵敏度和分辨率[1-2]。在美国、欧洲和日本,氟代脱氧葡萄糖(18F-FDG)PET已先后纳入医疗保险范围[3-4],然而仅有PET是完不成成像工作的,它需要配套的回旋加速器和化学制剂系统。在国内,生产用于PET诊断的放射性同位素的回旋加速器几乎均是从国外进口的[5]。医用回旋加速器作为复杂且精巧的设备,子系统较多、控制变量繁多、变量精度要求高且控制逻辑复杂,需安装在医院,由非核专业人员操作,所以要求操作足够简单、安全联锁足够完善[6-7]。
中国工程物理研究院流体物理研究所自主建造了PET医用回旋加速器商业样机,其引出束流能量为11 MeV,引出束流强度为50 μA,高频系统工作频率为72.12 MHz,平均磁感应强度为1.18 T,高频功率源的占空比可调节[8]。为满足该医用回旋加速器安全、稳定的运行,本文采用不带低电平控制功能的高频系统,避免直接接触高压的危险。选用西门子的S7-1500可编程控制器为前端控制器,完成系统工作频率的精确扫描,实现高频系统相位稳定、幅度稳定、安全联锁等。
1 高频谐振腔的频率特性
回旋加速器高频谐振腔腔体角频率为:
(1)
其中:ω0为高频谐振腔腔体角频率;f0为高频谐振腔腔体频率;L为电感;C为电容。
当高频功率源输出角频率ω和ω0相等时,系统处于谐振状态,根据传输线理论,高频功率源输出的大部分高频功率将馈入到高频谐振腔中。否则,当二者频率不相等时,就会有功率反射,当反射功率大到某种程度,就会打火、甚至影响机器安全,严重影响回旋加速器性能。馈入到高频谐振腔中的功率P和入射功率P0之比为:
(2)
其中:Qe为外观品质因数;Q0为高频谐振腔固有品质因数。

(3)
根据式(3)对α进行求导可得:
(4)

当βc=1时,式(3)可变换为:
(5)
当Q0=3 300、f0=72.12 MHz时,以高频功率源输出频率f为横坐标,以P、P0之比为纵坐标,得到对应的关系曲线如图1所示。
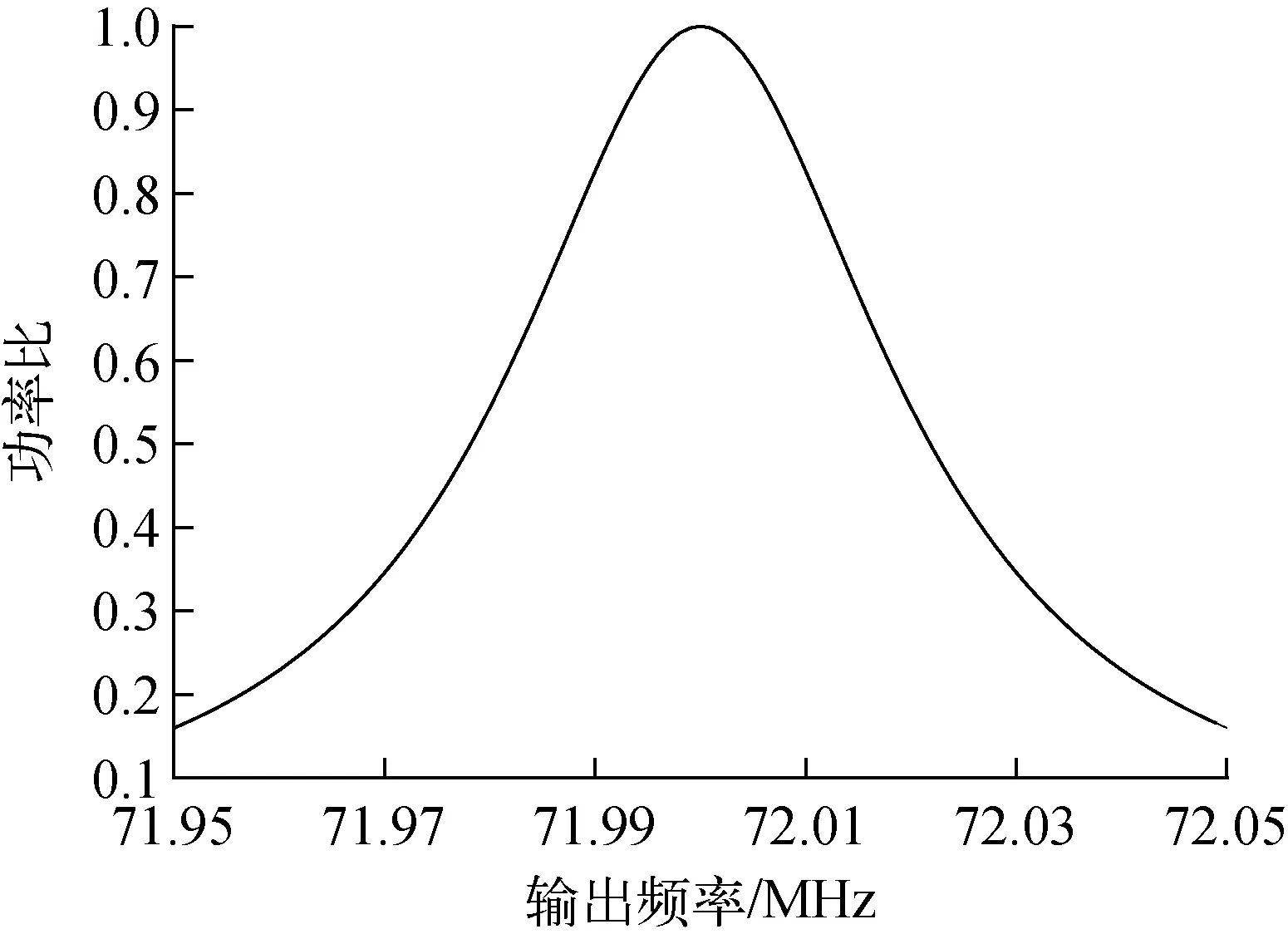
图1 馈入腔体的功率效率与高频功率源输出频率的关系Fig.1 Relationship between power efficiency of feed-in cavity and high-frequency operating frequency
从图1可看出,f与f0不一致时,输入到谐振腔的高频功率将出现不同程度的降低,当输出频率偏离中心频率10 kHz时,功率降低约20%,当输出频率偏离中心频率50 kHz时,功率降低达到80%以上,几乎出现全反射现象。可见,在回旋加速器中,高频加速腔具有窄带的工作特性,f必须与f0基本保持一致,因为当f与f0稍不匹配,不仅会影响高频功率馈入腔体的效率,导致腔压下降,以致引出束流流强的降低,进而导致同位素药物产额显著下降,而且若产生较大的功率反射,会造成腔体频繁打火,甚至影响机器安全运行。
实际上,在加速器运行过程中,由于高频功率源占空比的不断增加,热平衡温度不断变化,高频腔体产生微小形变,即使高频腔体产生μm量级的微小变化,也会使高频谐振腔的腔体频率产生很大的变化,导致高频功率源与高频腔的谐振状态被打破,馈入腔体的功率减少,束流强度变小。因此,需保证整个出束时间内二者始终处于谐振状态,则必须实时调节高频功率源的输出频率,或调节腔体结构改变腔体频率,从而使二者达到动态平衡。
2 高频系统安全联锁
回旋加速器的安全可靠运行需各子系统之间满足安全联锁关系[9-10]。联锁是指机器操作许可和禁止的约束条件[11-13]。具体地说,就是某种操作或状态完成前,不允许有别的操作和状态进入,是保证加速器正常运行和人员及机器安全的重要手段,联锁保护动作与加速器工作模式和故障危险程度密切相关。高频系统启动时,必须保证冷却水系统启动、水流量充足,且磁铁电源开启、达到目标励磁电流。
3 系统HMI界面
控制系统的主要任务就是对加速器的工作状态进行监控和控制,并为操作人员提供运行参数和调束手段,使各子系统协调平稳运行,以得到理想的束流。医用回旋加速器控制系统包括真空、冷却水控制,电源控制,引出及靶控制,高频系统,束流测量,运动控制,联锁保护等[14]。控制系统总体结构如图2所示。

图2 控制系统总体结构Fig.2 General structure of control system

图3 HMI主界面 Fig.3 HMI main interface
通过WinCC设计的HMI主界面如图3所示,包括束流测量系统、高频系统、磁铁电源系统、离子源系统的主要参数,可实现操作系统的可视化和人机交互功能。设计的高频系统界面如图4所示,不仅设置有腔体频率、腔压、入射功率、反射功率、相位、占空比等数据的写入和读取,而且绘制有真空度、高频频率、占空比、入射功率、反射功率的实时变化曲线,将高频控制部分集成到人机界面程序的整个系统控制模块中,实现对整个系统的控制。
4 高频系统控制
高频系统的控制任务包括高频系统状态监控、低电平控制、打火保护等,本文采用的高频系统不带低电平控制功能,而是由PLC完成工作频率扫描、幅度稳定、相位稳定及打火保护等控制功能。
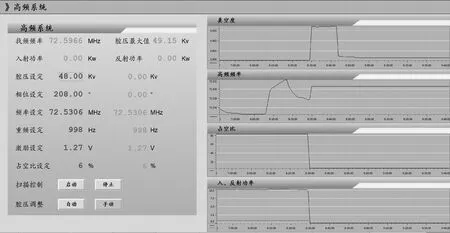
图4 高频系统界面Fig.4 High frequency system interface
4.1 工作频率扫描
工作频率扫描分为初步扫描和精细扫描两个阶段。初步扫描以较低的激励电压(1.2 V)和占空比(6%),固定重复频率(998 Hz),从频率下限(72 MHz)开始以固定步长(10 kHz)逐步增加频率进行工作频率的扫描,找到腔压最大值对应的频率,工作频率的上限为72.5 MHz。精细扫描在初步得到的频率的±20 kHz的范围内进行,频率步进长度为0.5 kHz,再次扫描得到准确的腔压最大值,进而得到更精确的谐振频率。
4.2 幅度稳定
根据测量的腔压偏差调整激励电压V。具体的调整方法为:当腔压检测值V1与腔压设置值V2相对偏差大于1%时,V=V0+0.2×(V1-V2)/V2,其中,V0为当前激励电压。为保证调整的安全,设置了激励电压的上限。
4.3 相位稳定
相位稳定控制根据高频系统失谐程度,采用不同的稳定策略达到相位稳定的要求。失谐程度分为严重失谐和轻度失谐。严重失谐判据为:0.5Win≤Wf≤0.8Win,其中,Win为入射功率,Wf为反射功率。此时,相位数据可能无效,程序会记录该事件。采用的调整策略为:1) 报警与历史趋势存储;2) 降低占空比至6%;3) 升高频率,频率升高步长为(当前频率—初始频率)×0.1,若频率调节到初始频率时,还处于严重失谐(相位变正常但反射未降低),则将占空比降低为1%,并重新启动扫描程序以确定频率。频率升高过程中,如高频已处于非严重失谐情况,恢复严重失谐时的占空比参数(占空比增加的步长为1%),转入轻度失谐或正常情况处理。初始频率为工作频率精细扫描阶段得到的谐振频率。
4.4 打火保护
打火检测与保护的控制逻辑为:当Wf>0.8Win,Wf>5 kW时,判断为打火。程序判断到打火时,由PLC关断信号源,等待30 ms后重新启动信号源输出。高频系统配置有打火保护模块,检测到打火后,切除激励电压100 ms,并输出打火保护信号。PLC需检测该保护信号,并在规定时间(1 s)内对其进行计数,如出现持续打火(连续3次),自动启动扫频,重新对工作频率进行扫描。
由于检测算法中首先检测宏脉冲头部后60 μs开始检测打火,检测到打火高频输出停止30 ms。重新启动射频脉冲后,监测点可能位于脉冲中部,无法检测到脉冲头部,从而检测算法无法正常判断。为避免该情况的发生,可将高频停止时间改为29.2 ms或将宏脉冲频率设置为980 Hz,可保证占空比工作在80%以内的正常检测。
4.5 高频自动老练
控制程序设计了高频腔自动老练程序。自动老练分为扫频、同步变更脉宽、降功率等步骤。扫频与工作频率扫描类似。同步变更脉宽步骤为:保持占空比与重复频率的比值(0.1)不变,占空比与重复频率同步变更,每个工作点持续10 s,如出现失谐情况,启动失谐调整。降功率步骤为:降低激励电压,从10 kW的入射功率对应的激励电压开始降低,步长0.02 V,降至入射功率为5 kW左右,每个工作点持续10 s。若出现失谐情况,启动失谐调整。
5 高频控制结果
图5~7分别为回旋加速器开机并连续工作2 h时高频相位、高频腔压、谐振频率的实时变化曲线,图8为工作过程中靶流的变化曲线。

图5 高频相位随时间的变化Fig.5 High frequency phase vs time
从图5可看出,高频相位先迅速下降,约5 min后趋于稳态。分析可知,在打靶的初始阶段,由于高频功率源的占空比迅速提升,加速器内部部件的温度发生显著变化,导致高频谐振腔腔体频率发生变化,控制系统会自动调整高频功率源的输出频率以保证谐振关系[15],此时相位也会发生相应变化,而随高频功率源输出频率趋于稳定,相位最终稳定在207.5°左右,上下幅度控制在±1°以内。
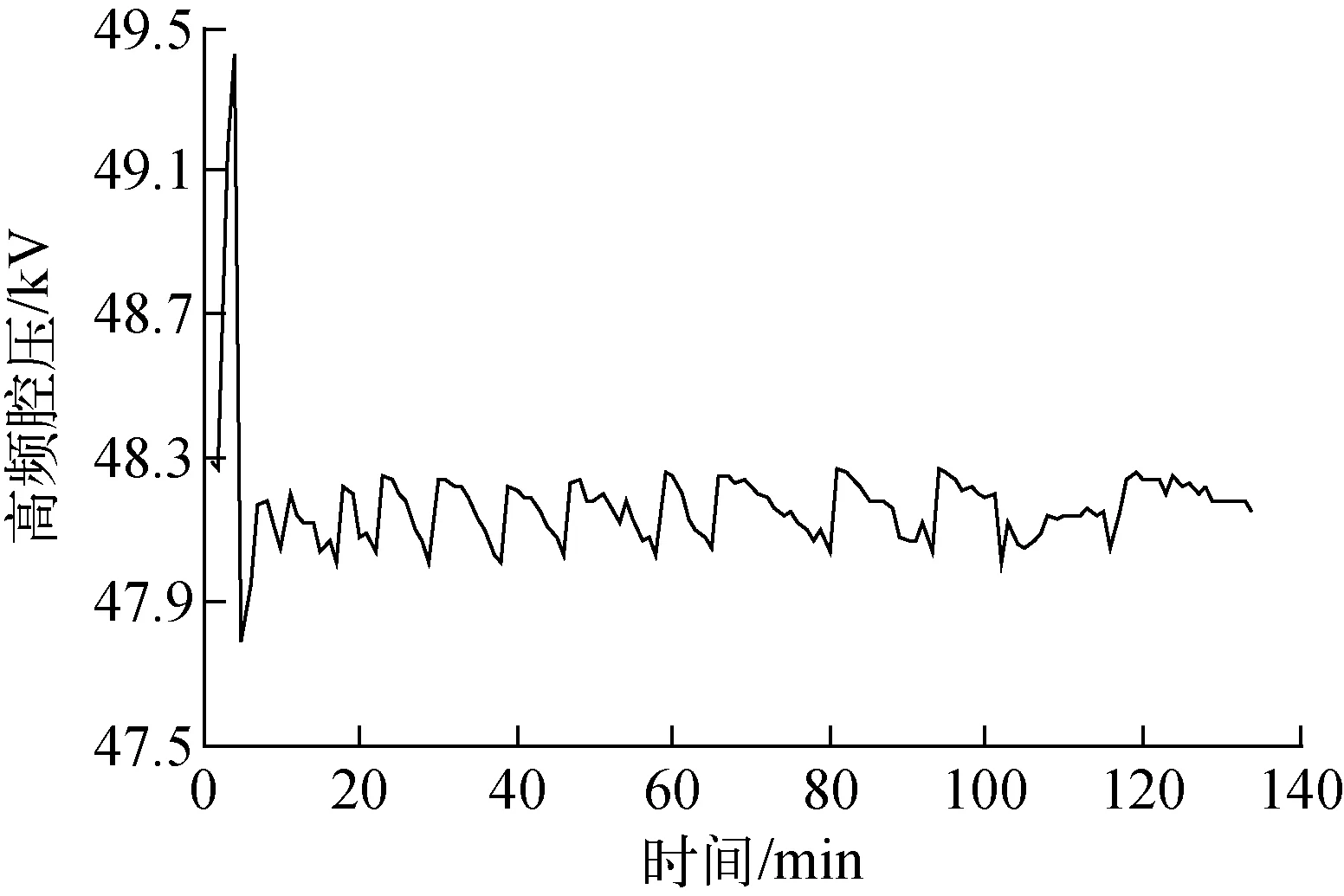
图6 高频腔压随时间的变化Fig.6 High frequency cavity voltage vs time

图7 谐振频率随时间的变化Fig.7 Resonant frequency vs time

图8 靶流随时间的变化Fig.8 Target beam current vs time
从图6可看出,高频腔压先迅速上升并发生超调,约5 min后迅速下降,虽有小幅波动,但基本稳定在48 kV左右,上下幅度控制在±1%以内。分析认为,初始阶段,高频功率占空比迅速上升,导致高频谐振腔体发热,谐振频率发生偏移,此时,高频功率源的输出功率还未稳定跟频,而系统为了保证腔压,强制提升激励电压,导致腔压产生超调,之后,待高频功率源的频率与高频谐振腔的腔体频率一致时,激励电压下调,并保持稳定。
从图7可看出,高频谐振腔腔体频率先是急剧下降,约下降50 kHz、10 min后,频率基本稳定在72.52 MHz,之后变化的范围约10 kHz。分析可知,加速器刚开始运行时,高频功率源占空比的提升,对高频谐振腔腔体频率影响巨大,之后由于水冷、束流负载等各种不确定性因素的影响,也会导致谐振频率的变化,但从图8的束流结果可判断出,高频功率源的输出频率可实时跟踪高频谐振腔的腔体频率,实现频率的匹配。
从图8可看出,在开始上升时由于占空比迅速上升靶流有一下降处,虽然励磁电流能实现对谐振频率的跟踪,但是磁场响应偏慢。在第1次到达目标束流时,靶流有小量的下降过程,是由于过快的占空比调整,控制系统通过相位不断地调整谐振频率,虽然励磁电流能实现与谐振频率的匹配,但是工作频率却并不是最佳频率,此时最大偏差也不到稳态值的7%。约7 min后,腔压、相位、谐振频率、励磁电流、前向功率、反射功率等参数稳定,靶流能很好地保持在24.2 μA左右,误差小于±0.2 μA,靶流的稳定输出间接地说明高频参数的稳定。
6 结论
本文设计的医用回旋加速器控制系统的子系统由S7-1500可编程控制器统一管理、采用WinCC组态软件平台实现过程监控、存储,最终实现了系统的集成。由于子系统相互联系,互相牵制的复杂性及出现的故障危险程度的差异,分别从软件、硬件方面对系统进行了相应的联锁保护,保证了加速器设备的正常运行和人员安全。所采用的高频系统中,利用PLC完成工作频率的自动扫描,实现了相位稳定、幅度稳定、打火保护等,从而实现了低电平控制功能,满足了加速器运行及其调试要求。
猜你喜欢
物理学报(2022年23期)2022-12-14
包装与食品机械(2022年4期)2022-09-16
核技术(2020年12期)2020-12-18
真空与低温(2019年1期)2019-03-07
科技传播(2016年20期)2017-03-01
中文信息(2016年11期)2017-02-11
西北工业大学学报(2015年3期)2015-12-14
现代电子技术(2015年22期)2015-12-02
长春理工大学学报(自然科学版)(2015年6期)2015-10-12
电子技术与软件工程(2015年6期)2015-04-20
