
融合微分重排与匹配的高光谱快速目标检测
2019-09-13 06:18王含宇杨名宇孟令通王檬檬
液晶与显示 2019年8期
王含宇,杨名宇,王 浩,孟令通,王檬檬
(1.中国科学院 航空光学成像与测量重点实验室,吉林 长春130033;
2.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033)
1 引 言
高光谱技术具有图谱合一特性,可探测物体形貌特征及空间分布,还可获取辐射度及光谱信息,借助高光谱提供的精细反射率光谱信息及代表物体真实性的“指纹光谱”,可在自然背景中完成对目标的准确检测,在军事目标侦察探测、伪装隐身及民用环境监测、资源管理等领域都有着广泛的应用[1]。如何高效快速发现背景环境(如植被、沙漠、海洋、雪原)中的目标,是当前高光谱目标检测的一大热点与难点[2-3]。
目前,常见的高光谱目标检测算法有基于子空间投影的RX算法[4]和正交子空间投影算法(Orthogonal Subspace Projection,OSP)[5],基于概率统计模型的约束能量最小化算法(Constrained Energy Minimization,CEM)[6-7]和自适应余弦估计探测器(adaptive coherence/cosine estimator,ACE)[7],以及基于原始光谱特征的光谱角匹配(Spectral Angle Mapper,SAM)[8-9]。由于高光谱图像具有精细的反射率光谱信息,导致相邻谱段相似性强,冗余性较高[10-11],在处理较大尺寸高光谱图像时,上述算法无法满足实时性需求,常通过降维的方法从原始数据中选择相关性小、有代表性的波段子集[9]。光谱微分法通过对反射率曲线进行相应的数学变换,实现将某些波段上的特征适当放大,同时消除一些噪声因素的影响,利用变换后特点更加明显的波段进行信息提取[12]。目前,光谱微分技术多用于已知目标光谱的高光谱目标检测中[12-15],对于多类目标场景适应性较差。
本文从背景光谱特性出发,提出一种融合光谱微分重排与光谱角匹配的有监督快速目标检测算法,通过先验背景光谱微分放大目标背景差异,光谱重排提取差异最大谱段集,滤除背景信息锁定目标位置;再由光谱角匹配法精细筛选目标位置、细化目标间差异。与5种常用检测速度较快的算法在ROC曲线、检测时间、曲线下面积AUC及虚警率等方面进行比较,定量评估所提算法性能。
2 快速目标检测算法
为了降低高光谱影像的数据维度、减少数据冗余,提高检测效率,本文仅利用背景光谱微分重排与光谱角匹配融合算法检测大范围背景环境中的目标。通过背景光谱微分重排实现光谱降维,从大量高光谱波段中选择抑制背景、突出目标的最优谱段集,背景光谱可根据采集的高光谱图像人工判定背景位置读取或在美国地质调查局USGS网站(http://www.usgs.glovis)的地物光谱数据库中获取;计算图像各像素点在最优谱段的微分值并减去背景光谱的微分结果,再加权求和阈值化获取目标位置大致区域,结合抗干扰性强的光谱角匹配法对提取出的目标细化判别。
2.1 光谱微分
光谱微分技术常用于比较光谱维数据间差异,从广义光谱特征出发,利用光谱微分对光谱横轴变化敏感的优势,通过计算光谱不同阶数的微分值可快速获取光谱弯曲点及吸收峰(谷)的对应谱段。光谱微分既可消除基线漂移或者平滑背景干扰的影响,也可提供比原光谱更加清晰的光谱轮廓变换[14]。从数学意义出发,光谱一阶微分表示的是光谱的变化率,二阶微分突出光谱的弯曲点,三阶微分则突出光谱轮廓的变化。假设一个光谱矢量s=[s(λ1),s(λ2),…,s(λl)],其中λ为波长、s(λi)是对应波长λi时的反射率。一阶微分的定义为

(1)
其中:Δλ是λi和λj两波段的谱段间隔,二阶、三阶光谱微分可由一阶微分导出,公式如下:

(2)
(3)
相邻谱段间隔为Δλ=λl-λk=λk-λj=λj-λi,λl>λk>λj>λi。光谱微分可适当放大地物在某些波段上的特征,可利用变换后特征更明显波段进行信息提取。吕利利等人[12]对多光谱遥感影像的微分结果研究发现,更高阶的微分结果并不一定使信息量增加。相比一阶微分,二阶微分波段信息量有一定增加,三阶微分各波段特征则与二阶微分相似性较高。此外,Qu等人[16]也证实了此观点,其将原始光谱分别与遥感影像的一阶到四阶微分组合进行目标提取,并分析提取精度,发现一到三阶微分的加入均能极大地提高目标识别精度,而四阶微分所包含的信息量较少。因此,三阶以内光谱微分对于提取特征、放大目标背景差异效果更好。
2.2 光谱重排
光谱重排常用于区分在形状、反射率(DN值)和变化趋势等方面差异不大的地物光谱;针对原始光谱上需提取的地物无显著特征信息,地物间的不相关性均匀分布于各个波段的情况,采用光谱重排方法,打破原始光谱按照波长排列的次序,根据反射率或DN值(Digital Number)大小对各个波段重新排列,作为重排基谱的光谱曲线将呈现单调上升(下降)的趋势,而其他光谱曲线在按基谱的顺序重排后出现明显特征,且随基谱不同,相应特征出现的位置也不同[5]。
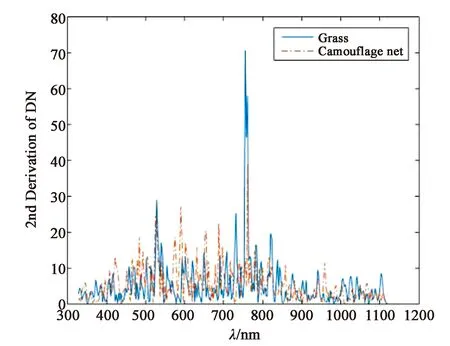
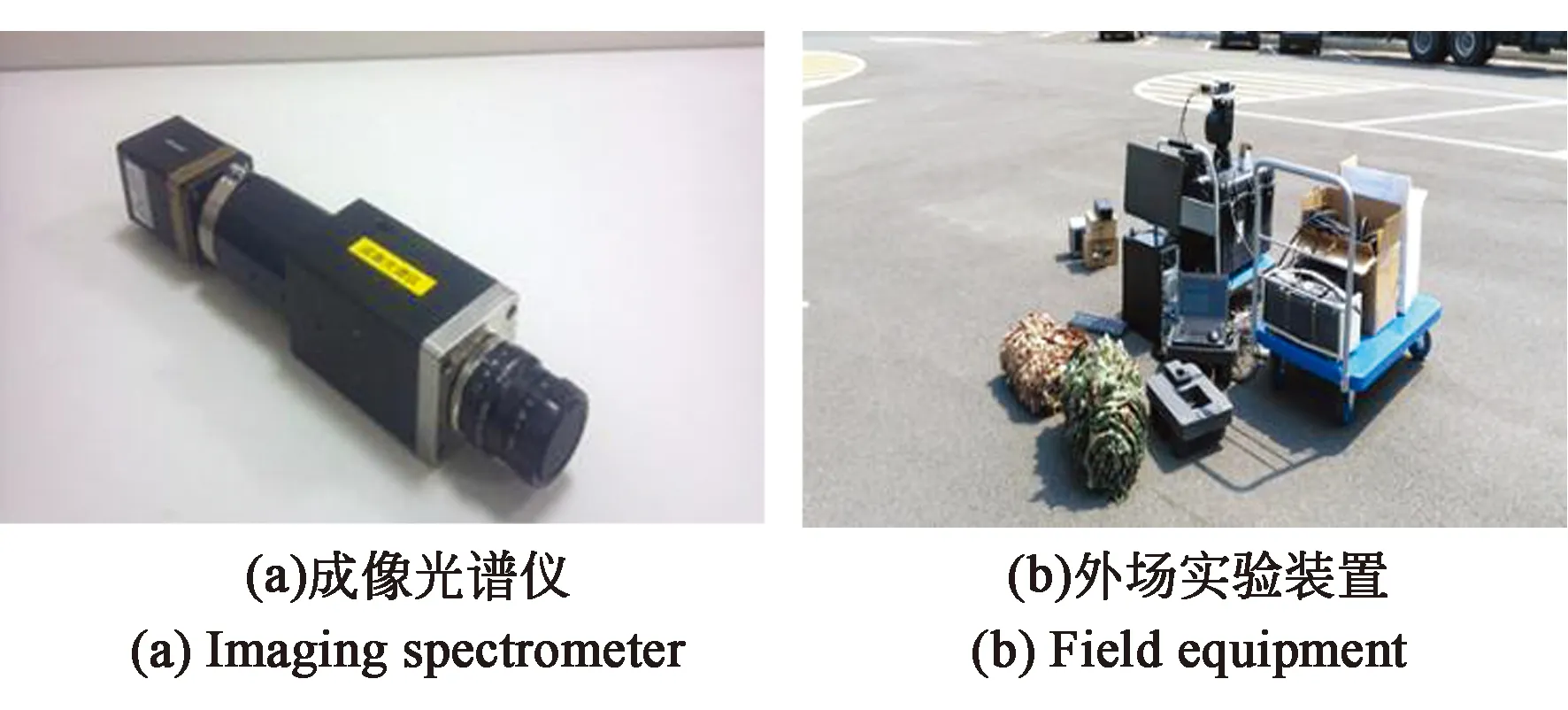
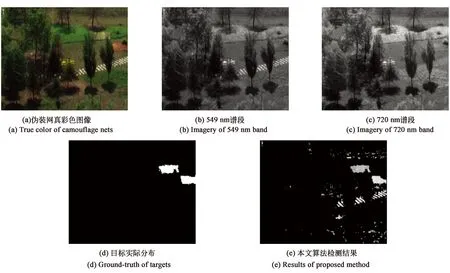
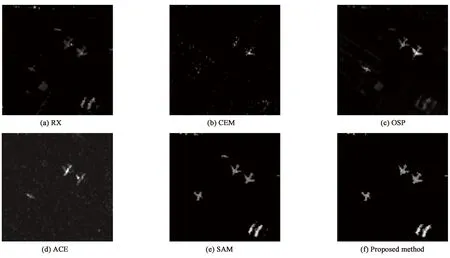
以两条光谱曲线r1=(r11,r12,…,r1L),r2=(r21,r22,…,r2L)为例来说明光谱重排的做法,其中L为波段数。以r1为基谱,将r11,r12,…,r1L的值按照从大到小的顺序重新调整,得到重排光谱为r1*=(r1kL,…,r1k2,r1k1),满足:当i 为放大背景与目标差异,本文采用光谱重排法将背景光谱微分值重排,挑选抑制背景的最优谱段集合,仅计算最优谱段及其原邻域高光谱数据将目标从背景中初步检测出来,在不影响检测精度的前提下,提高计算实效性。最优谱段数取小于背景光谱微分均值1%的谱段个数。通过对比分析草地、伪装网的光谱DN值曲线不难发现(图1(a)),草地与伪装网的光谱曲线变化较为相似,在波长550 nm和680 nm左右处分别为一个反射峰和吸收峰。原始光谱较难区分两种地物,而分别对两类地物微分后特征差异较明显,如图1(b)所示,761 nm波长草地轮廓发生剧烈变化,谱线上出现极大值点。将微分后的光谱曲线按草地微分DN值由大到小重排,如图1(c)所示,获得的草地光谱特性由强渐弱,而伪装网光谱特性则强弱无序,微分重排放大了草地与伪装网差异,使两者易于区分。 (a)光谱DN值(a)Spectral digital number (b)光谱微分(b)Spectral derivative (c)光谱微分重排(c)Recomposition of spectral derivative图1 草地和伪装网的光谱曲线Fig.1 Spectral curves of grass and camouflage net 光谱角匹配法(Spectral Angle Mapper,SAM)[8-9]通过计算光谱向量间夹角衡量两光谱的相似程度,两个光谱向量的夹角越小,匹配度越高,从而判定出该像素是否包含目标。设在l个谱段的高光谱图像中,已知背景光谱矢量为T=(t1,t2,…,tl)T,待识别像素的光谱矢量为R=(r1,r2,…,rl)T。则反余弦夹角可表示为: (4) 式(4)可进一步写为: (5) 光谱角与光谱矢量的模无关,不受谱段选取范围的影响,可消除或减弱因太阳入射角、地形、坡向和观测角等因素引起的同物异谱现象,光谱角对于乘性干扰具有良好的抗干扰性,不受照度变化的影响[9]。本文选用SAM算法精细判别粗提取出的像素点光谱与背景光谱差异,避免逐点计算,提高运算速度,除可提取出目标背景间差异外,还可区分不同种类目标,在一定程度上提高检测精度。 本文提出的基于光谱微分重排与光谱角匹配融合的高光谱目标检测算法,如图2所示,主要分为以下步骤: 步骤1:对原始光谱数据预处理,主要包括大气辐射校正和几何校正,图像拼接和裁剪以及波段选择等;大气辐射校正可减弱因云、水汽等造成的图像信息失真和畸变。几何校正可减小影像间几何位置差异。拼接和裁剪可获取位于研究区范围内的影像数据。波段选择则去除信噪比较低的“坏”波段。 步骤2:人为选取背景像素位置或参考光谱数据库,获取背景光谱矢量,为避免选取误操作选到目标点,可同时选取多个背景点坐标,如图2中高光谱原始数据中的红点位置。 步骤3:对背景光谱进行微分重排,挑选最优谱段序列。设定微分阶数t、步长为st,根据多组背景重排结果综合挑选出n个背景特征较少最优波长,即为最优谱段。 步骤4:形成最优波长的谱段集。设挑选出的最优波长包含谱段λi,则在预处理后的光谱数据集中提取λi及其后步长为st的t个谱段λi+1,λi+2,…,λi+t的空间维信息,形成n个小谱段集。 步骤5:计算小谱段集逐个像素点的t阶光谱微分值,减去背景位置点的光谱微分值ft(xi,yi),再阈值化处理,得到新的n个微分去背景结果p,初步滤除背景信息。 步骤6:再对这n组数据加权求和阈值化,采用迭代线性加权法合并,公式如下: (6) 图2 目标检测算法流程图Fig.2 Flowchart of target detection algorithm 其中:β为加权系数,0<β<1;pi(x,y)为坐标(x,y)处的第i个小谱段集迭代加权后的粗检测结果。迭代加权的顺序与重排顺序相反,根据背景特征由小到大谱段顺序依次迭代,步骤5和6的阈值化处理均选当前空间维图像数据均值为阈值进行分割。从而得到进一步滤除背景、突出目标的粗检测结果hn。 步骤7:找出粗检测结果中不为0的像素点位置即为目标位置点,与背景光谱角匹配,通过不同阈值的选取,细化分辨粗提取出的目标间差异,得到精确目标检测结果。 为验证本文算法的检测精度与检测效率,实验在MATLAB R2015a环境,Intel Core i7-6500U(主频2.59 GHz)CPU,8 GB内存的计算机上运行。对自行采集的伪装目标高光谱图像和AVIRIS传感器获取的美国圣地亚哥机场图像进行实验,将提出的算法及5种常见运算速度较快的目标检测RX、CEM、OSP、ACE、SAM算法进行性能定量比较。 选用远距离人眼无法分辨的伪彩色目标对本文算法进行验证。绿色伪装材料是最典型的模拟绿色植被的伪装材料,常用于技术兵器、车辆和军服等军事装备的迷彩伪装[17]。本实验将黄、绿两种伪装网平铺于草地,验证算法在植被背景下对伪装网目标的检测能力。采用自行设计的光栅型摆扫式成像光谱仪,波长范围为0.4~1.0 μm,光谱分辨率为3 nm,共有270个光谱通道。实验时将其放于转台上进行扫描成像。成像光谱仪实物如图3(a)所示,外场实验设备如图3(b)所示。 图3 实验设备图Fig.3 Experimental equipment 图4(a)为光谱仪采集的RGB三通道彩色图像,图像尺寸为220×180。图4(b)和(c)为波长549 nm和720 nm谱段图像,很难直接辨别出伪装网位置。图4(d)为伪装网在草地上的实际分布情况。本文算法首先进行预处理,将信噪比较低的谱段剔除,获取180个有效谱段。为了避免人为选中非背景点带来误差,实验选取5组坐标作为草地背景位置,提取对应位置光谱分别进行二阶微分,步长为3 nm。光谱重排后,截取每组最小的80个谱段,并统计5组中出现次数最多的60个谱段形成谱段集。图4(e)为本文算法的检测结果,已基本将树木、矮灌木、草皮等与草地光谱相似的植被滤除掉,并将与草地背景光谱差异较大的黄、绿伪装网及石阶路提取出来。 图4 高光谱图像、目标实际分布情况及本文算法的检测结果。Fig.4 Hyperspectral imagery,ground-truth and detection results of proposed method. 为了客观评价本文算法的检测能力,分别采用RX、CEM、OSP、ACE、SAM算法对伪装网光谱数据进行目标检测,阈值处理后的检测结果分别如图5(a~e)所示,对比结果发现,6种算法均能将伪装网目标检测出来,对于树木和伪装网的区分能力较强,而除ACE外算法均会将石阶路检测出来。RX算法区分草地、伪装网能力较弱,CEM和OSP算法区分伪装网与裸地能力较弱,ACE算法检测出大量噪声,仅用SAM算法检测会出现大量虚警信息,本文算法检测的伪装网目标较清晰且虚警点数目较少。 图5 5种算法的检测结果Fig.5 Detection results of five algorithms 图6 6种检测算法的ROC曲线Fig.6 ROC curves of six detection algorithms 为了定量地评价算法,使用接收者操作特性(Receiver Operating Characteristic,ROC)曲线(图6)、检测时间、曲线下面积(Area Under Curve,AUC)、虚警率作为衡量检测特性的指标,比较结果如表1所示。ROC曲线能够描述检测率Pd和虚警率Pf的变化关系,纵坐标为检测概率Pd,横坐标为虚警概率Pf。Pd和Pf的定义如下: (7) (8) Nd为在某分割阈值下检测出的目标像元数目;Nt表示所有目标像元总数目;Nf为错分为目标的像元数目;N表示高光谱图像的像素总数。在相同的虚警率的条件下,检测率越高,算法的性能越好。为了去除计算机本身所引起的脉冲误差,以下所有有关检测时间和AUC的数据均进行了5次实验后取平均分析,AUC数值越大,算法的检测性能越好。 通过分析ROC曲线发现,在小于0.05时,OSP算法检测率最高;虚警概率在0.05~0.1时,本文算法检测率最高,而后小于OSP算法;当虚警概率大于0.28时,本文算法与OSP算法检测率相同。本文算法的运行时间远小于其他5种算法,是OSP算法检测速度的一倍。6种算法的AUC性能排序如下:OSP>本文算法>ACE>RX>SAM>CEM,本文算法虚警率最小仅为3%。OSP算法需已知目标和背景的先验光谱信息,ACE和CEM需已知目标的先验光谱信息,而目标光谱信息通常较难获取,且光照条件等因素也会影响先验目标光谱的准确性,在实际应用中较难实现。本文算法仅需已知背景光谱信息即可检测出目标,在SAM算法的基础上提升了检测速度,提高了检测精度,减少了虚警率,可高效快速发现隐身于背景环境中的伪装目标。 表1 6种算法检测时间、AUC及虚警率Tab.1 Computation time,AUC and Pf of six detection algorithms 为了进一步验证算法的稳定性和可靠性,实验选用一幅由AVIRIS传感器获取的美国圣地亚哥机场图像,共224波段,波长范围为0.2~2.4 μm。去除受水汽影响和低信噪比的波段后,剩余189个波段用于检测实验。截取其中图像大小为100×100像素,其第10个波段图像和实际地面目标分布如图7所示,其中共包含3架飞机。 图7 采集的机场图像Fig.7 Captured airport images 选取5组机场停机位置光谱作为背景光谱,图8为本文算法与对比算法的检测结果,观察发现,本文算法能检测出较完整的飞机形状,且虚警点较少。当检测目标较小时,选取目标光谱信息会造成较大误差,若选取不当,CEM、ACE和OSP算法很容易出现无法检测到目标的情况。而背景光谱由于范围较大选取相对容易,可通过点选多点减小误差。 图8 6种算法检测结果Fig.8 Detection results of six algorithms 图9和表2分别给出了6种算法的ROC曲线、检测时间、AUC及Pf。本文算法检测率最高与仅用SAM算法的ROC曲线几乎重合,当虚警率为0.01时,检测率已达到1,检测速度最快且虚警率最低,AUC性能排序为:本文算法>SAM>OSP>RX>ACE>CEM,且结合伪装目标实验结果不难发现,本文算法有效性和稳定性均最优,较适用于实际应用。 图9 6种检测算法的ROC曲线Fig.9 ROC curves of six detection algorithms 表2 6种检测算法的检测时间、AUC及虚警率Tab.2 Computation time,AUC and Pf of six detection algorithms 通过两组实验可以发现,本文算法在保证检测精度的同时,具有较低虚警率和计算复杂度。仅通过背景光谱的微分重排,提取目标背景差异较大谱段,对谱段微分差值加权阈值化,放大目标背景差异,进而剔除图像上与背景光谱相似的位置点,如实验一中与草地光谱相似的植被位置,实验二中的机场跑道、停机位等位置。再由光谱角匹配法精细区分剩余各点与背景的光谱相似性,提高了计算效率。这种粗检测与精判别相结合的方式,有效减少了检测虚警率,从而能够高效快速的发现背景环境中的目标。 针对高精度、准实时目标探测的实际应用需求,提出了融合光谱微分重排与光谱角匹配的高光谱快速目标检测算法,解决高光谱图像因具有精细反射率光谱信息而造成的数据量巨大的检测难题。本文提出了利用背景光谱矢量获取最优光谱集的方法,通过光谱微分重排技术放大目标与背景差异,抑制背景信息;再采用光谱角匹配法精细判别目标,在检测目标的同时还可区分出目标间的细微差异。实验结果表明:与RX、CEM、OSP、ACE、SAM等常见5种算法比较,本文所提算法的检测率较高,两组实验的AUC指标分别为0.984 7和0.995 6,且虚警率均低于3%。图像尺寸为220×180×270时,检测时间为0.36 s;图像尺寸为100×100×224时,检测时间仅为0.077 s。本文算法稳定性较好,适用范围较广,可用于高效快速的检测大范围背景环境中的目标。但方法也存在一定局限性:该检测方法对背景光谱的一致性要求较高。当表面光照不均匀或存在阴影时该检测方法的检测效能将会受到影响。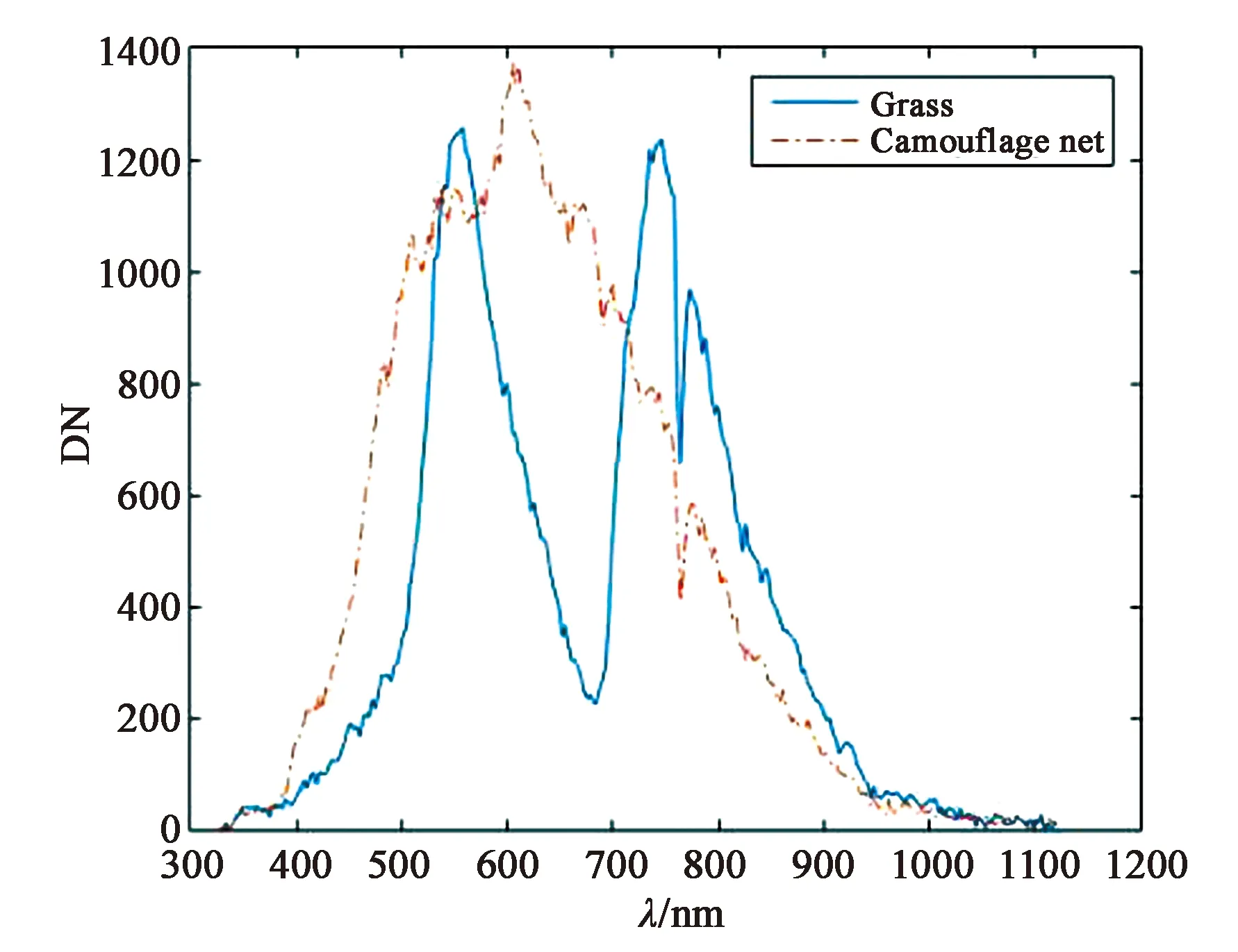

2.3 光谱角匹配法

2.4 光谱微分重排与光谱角匹配融合算法具体实现步骤


3 实验结果与分析
3.1 伪装目标检测实验




3.2 机场目标检测实验



4 结 论
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
石油化工自动化(2020年1期)2020-03-05
卫星应用(2020年12期)2020-02-04
数学物理学报(2019年5期)2019-11-29
通信技术(2019年8期)2019-09-03
中国光学(2019年4期)2019-09-02
中国循证儿科杂志(2019年2期)2019-06-04
激光与红外(2018年2期)2018-03-09
