
基于阵列天线的一种GPS多径抑制方法
2019-09-13 08:44李平敏梁绣滟朱铁林
导航定位与授时 2019年5期
李平敏,梁绣滟,朱铁林
(天津航天中为数据系统科技有限公司, 天津 300301)
0 引言
当全球定位系统(Global Positioning System,GPS)接收机使用传统的延迟锁相环(Delay-Locked Loop,DLL)对伪码进行跟踪时,由多径所引起的定位误差可能达到数十米,所以必须对多径干扰进行抑制。多径抑制方法主要有窄相关器技术[1-2]、多径延迟锁相环[2]和Strobe相关器技术[2]等,但是,在多径信号强且快速变化的多径环境下,这些方法消除多径干扰的效果并不理想。近年来提出了一种基于阵列天线的多径抑制技术,自适应阵列在期望信号方向形成主波束、较低旁瓣,还能在空间未知的干扰方向自适应地形成零陷,从而达到抗干扰和保护有用信号的目的。Avi Abu等[3-5]对空间平滑算法进行了研究,并对其进行深入分析;当出现误差和阵元位置误差时,将导致空间平滑算法的性能下降,因此,稳健性就成为自适应阵列处理的必然要求。
近年来涌现出许多稳健性算法,如用于改善一般失配的基于特征空间的稳健算法[6]、协方差矩阵消锥方法[7]和对角加载技术[8], S.A.Vorobyov等提出了基于最差性能最优的稳健自适应波束形成算法[9-18]。针对各种失配,文中提出了改进的稳健自适应波束形成算法。前后向空间平滑技术可以有效地恢复卫星多径信号造成的秩缺失,所提算法可以有效地改善各种失配,减小主峰偏移,有效抑制多径干扰。
1 GPS接收机多径信号模型
GPS接收机接收到的信号主要包括直达信号和多径信号。假设采用均匀线阵,具有M个阵元,相邻阵元的间隔半波长为λ/2,则采样时刻n的接收信号为

(1)
其中:x[n]为接收机在采样时刻n的接收信号,表示多径干扰的数目;s0[n]代表GPS信号;si[n]为第i个相干干扰信号和n[n]代表的空间噪声为相互独立的零均值高斯白噪声,并且与信号不相关;s0(t)和si[n]分别代表s0[n]和si[n]中的元素,表达形式如下
(2)
其中,i=0表示该信号为GPS信号,其他L路为多径干扰信号;A为信号幅度;ai表示信号幅度衰减系数。一般情况下,a0表示直达信号且a0=1,d(t)为导航电文信息且d(t)=1;c(t-τi)为不同延时的GPS伪码;ω0为卫星信号的中频频率;φi(t)为第i路信号的相位,取(0,2π)。这里只考虑τi小于1.5码片的多径影响。
2 多径效应对伪码跟踪的影响
为了方便讨论,这里只考虑一条多径对码环跟踪环路的影响且在分析时取A=1,则式(2)可以被写成
s(t)=c(t-τ0)cos(wct+θ0)+a1c(t-
τ1)cos(wct+θ1)
=c(t-τ0)cos(wct+θ0)+…a1c(t-
τ0-Δτ)cos(wct+θ0+β)
(3)
在DLL中,本地产生的超前和滞后伪码分别与同相和正交支路进行相关之后,得到的相关输出可以表达为[13]

(4)
将式(3)代入式(4)就可得到存在一条多径信号的情况下,各同相和正交支路的相关输出为

(5)
其中,d表示超前码和滞后码之间的间隔。
若本文采用非相干鉴相器,则鉴相函数的表达式如下[13-14]
(6)
将式(5)代入式(6),得在一条多径信号情况。
如图1所示,由于存在多径信号,使得载波鉴相误差不趋于0。显然对多径信号进行抑制是很必要的。
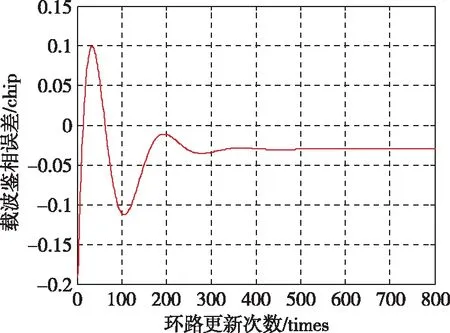
图1 一条多径情况下的载波跟踪环路的鉴相误差Fig.1 Phase discrimination characteristics of carrier tracking loop in a multipath case
3 一种稳健的GPS多径抑制方法
把M阵元的阵列分成为K个子阵列,每个子阵列的阵元数为P>L,第一个子阵为参考矩阵,则前向平滑的K个子阵的接收数据为
xi[n]=[xi[n],…,xi+p-1[n]]i=1,…,K
(7)
其协方差矩阵可表示为

(8)
则将前向和后向平滑技术进行组合,由此可得
(9)
其中
3.1 稳健波束形成算法
由于指向误差、阵元误差和采样数据有限拍误差等因素的影响,使得导向矢量存在一定的误差,从而导致波束形成器输出信干噪比下降,因此稳健波束形成算法成为近年来研究的一个重点。
稳健波束形成器的代价函数表示如下[8]
(10)
(11)

(12)

(13)
(14)

(15)
将式(15)代入式(12),式(15)可以等价转化为如下形式
(16)
3.2 改进的稳健波束形成算法
(17)

(18)
与前面对式(13)的处理方法类似,可以得到式(19)
(19)
所以仿照文献[12]的处理方式,式(19)可等价转化为如下的简化形式
(20)
仿照文献[12]的求解方法,那么式(20)稳健波束的最优解为
(21)

(22)
将式(22)代入式(21)中可以得到如下等式
(23)

4 仿真与分析
为了验证所提出算法的正确性,进行如下的仿真分析。假设阵元数M=8,阵元间距为半波长,P=5,多径信号幅度是直达信号的0.6。假设期望信号的方向角为0°,多径干扰信号的方向角为30°。本文提出了改进的鲁棒Capon波束形成(Improved Robust Capon Beamforming,IRCB)算法。为了说明算法,与采样矩阵求逆(Sample Matrix Inver-sion,SMI)算法和对角加载(LoadedSample Matrix Inversion,LSMI)算法进行比较。Ideal ss表示导向矢量无失配下的方向图, mis IRCB表示本文提出的改进的稳健波束算法的方向图。
仿真实验1。图2(a)给定参数γ=1,ε=10,信噪比SNR=-5,INR=20,假设存在5°的信号方向失配,IRCB算法能够很好地实现主波束指向,减少主峰偏移,相干干扰方向形成零陷。图2(b)参数同上,采样快拍数为100。快拍数的下降,将导致SMI算法随着SNR的增加而性能急剧下降,存在导向误差;LSMI算法随着SNR的增加呈现下降趋势;IRCB算法在导向矢量失配和低快拍的情况下,依然保持良好的输出性能。
仿真实验2。为了分析方便,假设无噪声干扰,只有多径信号的干扰。设GPS直达信号方向角为0°,多径干扰入射角为30°,波达指向误差为5°,本地码频率为1.023MHz,码环路带宽为10,跟踪卫星1号,设一条多径衰减系数为0.6,码延时为0.4chip。图3表示由于存在多径信号,使得伪码跟踪环路有着较大的跟踪误差,跟踪误差不趋于0,这可能导致锁相环失锁,定位失败。图4应用本文所提IRCB算法,进入环路滤波之前,能够有效地抑制多径,实现了伪码准确跟踪。
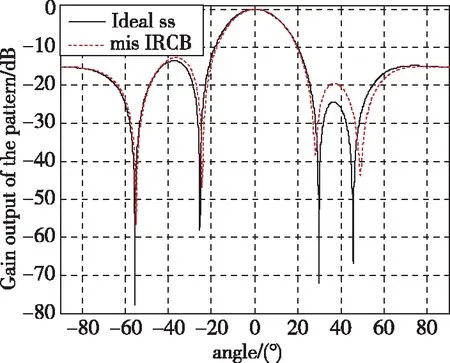
(a)多径信号下Capon波束形成图
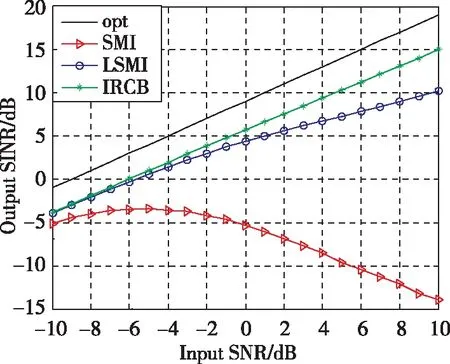
(b)输出SINR和SNR的关系曲线图2 波达指向误差为5°Fig.2 Angle estimation error is 5°
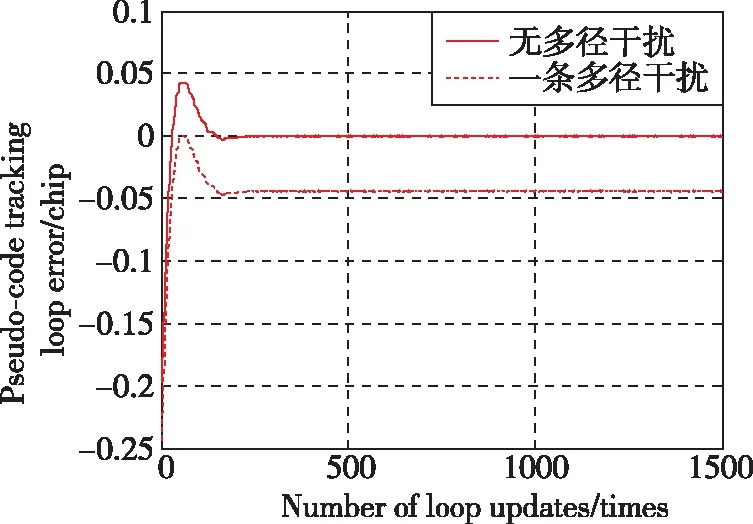
图3 存在一条多径时的伪码跟踪环路误差曲线Fig.3 Pseudo-code tracking loop error comparison curve under a multipath
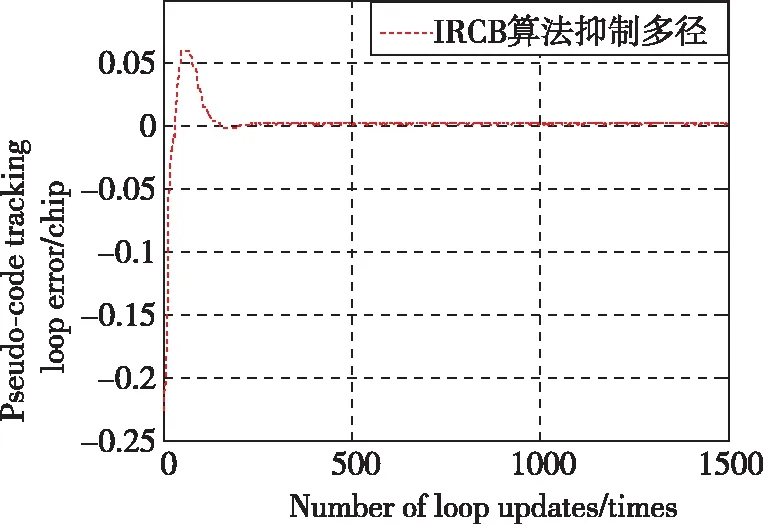
图4 多径抑制的伪码跟踪环路误差比较曲线Fig.4 Pseudo-code tracking loop error comparison curve after multipath suppression
5 总结
地面GPS接收机天线采用阵列天线,进入基带处理之前,利用空间平滑对多径信号进行解相干处理,有效抑制了多径干扰,利用改进的稳健波束形成算法解决了各种信号失配的情况,从而实现了对伪码跟踪环路的准确跟踪。综上所述,采用阵列天线算法实现多径抑制具有较高的工程价值。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
城市道桥与防洪(2022年1期)2022-02-25
导航定位学报(2022年1期)2022-02-17
河北工业大学学报(2021年4期)2021-09-23
全球定位系统(2021年3期)2021-08-07
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
