
机械式变速箱的多轴转向控制优化研究
2019-09-12 10:41陈伟全
智能计算机与应用 2019年4期
关键词:力矩
陈伟全


摘 要:为了提高机械式变速箱的多轴转向控制的稳定性,提出基于非线性多刚体动力学分析的机械式变速箱的多轴转向控制方法,构建机械式变速箱的转向动力学模型,以输出转向力矩、换档阻力以及负载力矩等为约束参量,构建机械式变速箱的多轴转向控制的被控对象模型,采用自适应迭代学习控制方法实现多轴转向力矩的最大增益调节,采用非线性多刚体动力学分析方法进行最优控制参量估计,结合期望轨迹的模糊跟踪识别方法实现机械式变速箱的多轴转向控制律优化设计。仿真结果表明,采用该方法进行机械式变速箱的多轴转向控制的输出稳定性较好,轨迹跟踪误差较低,提高了机械式变速箱的控制品质。
关键词:机械式变速箱;多轴转向控制;动力学模型;力矩
文章编号:2095-2163(2019)04-0230-05 中图分类号:TG156 文献标志码:A
0 引 言
机械式变速箱作为汽车的主要机械部件,是确保汽车安全稳定可靠运行的关键,机械式变速箱的多轴转向控制是整个变速箱设计的基础,机械式变速箱为变速换挡提供了一种高效的解决技术,采用人工智能技术和控制技术进行机械式变速箱的多轴转向控制,结合对机械式变速箱的控制参数调节和扰动抑制方法,进行机械式变速箱执行器优化设计,提高多轴转向控制能力和品质。对机械式变速箱的多轴转向控制是建立在对机械式变速箱的运行姿态参数采集和信息融合基础上,结合对参数的稳定性调节方法进行机械式变速箱助力转向控制,相关的控制方法研究受到人们的极大关注[1]。
传统方法中,对机械式变速箱的多轴转向控制主要采用模糊PID控制方法,结合对运行的结构参数调节和运行动力学分析方法[2],进行机械式变速箱运行的控制律设计,取得一定的研究成果[3],例如,文献[4]中提出一种基于二次型调节模型的机械式变速箱运行控制方法,采用模糊控制方法进行参量自适应调节,提高机械式变速箱高度和航向的控制性能,但该方法的控制稳定性不高,多轴调节性能不好。针对传统方法存在的弊端,本文提出基于非线性多刚体动力学分析的机械式变速箱的多轴转向控制方法,构建机械式变速箱的转向动力学模型,以输出转向力矩、换档阻力以及负载力矩等为约束参量,构建机械式变速箱的多轴转向控制的被控对象模型,采用自适应迭代学习控制方法实现多轴转向力矩的最大增益调节,采用非线性多刚体动力学分析方法进行最优控制参量估计,结合期望轨迹的模糊跟踪识别方法实现机械式变速箱的多轴转向控制律优化设计。最后进行仿真实验分析,展示了本文方法在提高机械式变速箱的多轴转向控制能力方面的优越性能。
1 动力学模型建立和约束参量分析
1.1 机械式变速箱的转向动力学模型
为了实现机械式变速箱多轴转向的优化控制,首先构建机械式变速箱的运行运动学和动力学参数模型,机械式变速箱多轴转向的动力学过程是一个复杂的多刚体动力学模型[5],构建一个优化目标函数来进行机械式变速箱多轴转向控制设计,以输出转向力矩、换档阻力以及负载力矩等为约束参量,采用陀螺仪、加速度计等敏感元件进行参数采集,采集的机械式变速箱动力学参数输入到控制执行器中进行信息融合处理,实现参数的自适应融合,结合Kalman滤波融合方法,进行机械式变速箱的多轴转向参数调节[6],在不确定性和干扰作用下,构建机械式变速箱在各个方向的运行动力学方程描述为:
1.2 控制约束参量分析
2 控制算法优化
2.1 多轴转向力矩的最大增益调节
在上述构建机械式变速箱的转向动力学模型和控制约束参量模型的基础上,进行控制律的优化设计,本文提出基于非线性多刚体动力学分析的机械式变速箱的多轴转向控制方法,构建机械式变速箱的多轴转向控制的被控对象模型,采用自适应迭代学习控制方法實现多轴转向力矩的最大增益调节,自适应迭代学习控制函数表示为:
2.2 机械式变速箱的多轴转向控制
采用非线性多刚体动力学分析方法进行最优控制参量估计,结合期望轨迹跟踪方法进行控制律设计[10],机械式变速箱运行轨迹预测方程表示为:
其中,T表示运行工况采样时间间隔,ei表示参数误差,结合期望轨迹的模糊跟踪识别方法实现机械式变速箱的多轴转向控制,综上分析,实现控制算法的优化设计。
3 仿真实验与结果分析
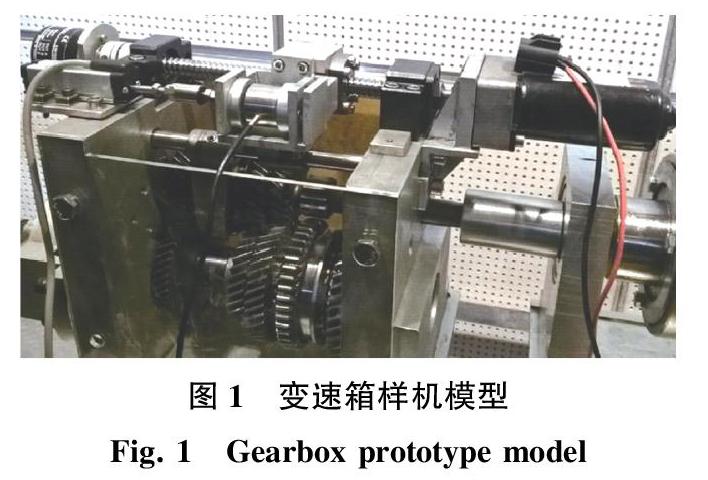
为了验证本文方法在实现机械式变速箱的多轴转向控制中的应用性能,进行实验分析,实验采用Matlab 7 仿真设计,对变速箱的工况信息采样频率为fs=10*f0Hz=10 KHz; 电枢电感设定为0.005 H;反电动势系数为0.018 V·s/rad;传动效率为0.87,等效阻尼系数为0.004 N·ms/rad;根据上述仿真参数设定,进行机械式变速箱的多轴转向控制仿真分析,在模拟实车运行条件下,变速箱的样机如图1所示。
首先采用传感器进行机械式变速箱的多轴转向的力矩信息采集,得到转向力矩如图2所示。
以图2的数据为研究样本,进行机械式变速箱的多轴转向控制,得到期望轨迹的模糊跟踪结果如图3所示。
分析图3得知,采用本文方法进行机械式变速箱的多轴转向控制的轨迹跟踪性能较好,测试不同方法进行机械式变速箱的多轴转向控制的误差,得到对比结果如图4所示,分析图4得知,本文方法进行机械式变速箱的多轴转向控制的误差较低,提高了控制的品质。
4 结束语
本文提出基于非线性多刚体动力学分析的机械式变速箱的多轴转向控制方法,构建机械式变速箱的转向动力学模型,以输出转向力矩、换档阻力以及负载力矩等为约束参量,构建机械式变速箱的多轴转向控制的被控对象模型,采用自适应迭代学习控制方法实现多轴转向力矩的最大增益调节,采用非线性多刚体动力学分析方法进行最优控制参量估计,结合期望轨迹的模糊跟踪识别方法实现机械式变速箱的多轴转向控制律优化设计。研究得知,本文方法进行机械式变速箱的多轴转向控制的误差较低,性能较好,改善了控制精度和灵敏度。
參考文献
[1]姚世鹏,熊欢,兰晓霞,等. 汽车四轮转向最优控制技术的研究[J]. 船电技术,2018,38(11):33-36,42.
[2]刘成强,徐海港. 汽车电动助力转向系统控制策略研究[J]. 机械设计与制造,2018(10):265-268.
[3]靳立强,田端洋,刘阅. 电动轮汽车驱动助力转向与稳定性协调控制[J]. 机械工程学报,2018,54(16):160-169.
[4]何凯, 林成涛, 李亮, 等. 电控机械式变速箱换档过程迭代学习控制[J]. 机械工程学报, 2019, 55(4):84-90.
[5]尹冠生,姚如洋,赵振宇. 高速公路防撞垫概念模型的优化及控制参数研究[J]. 工程力学,2017,34(S1):220-226.
[6]桑楠,魏民祥. 基于ESO与NTSM的汽车主动前轮转向控制[J]. 南京航空航天大学学报,2018,50(4):521-527.
[7]LORIA A. Observers are unnecessary for output-feedback control of lagrangian systems[J]. IEEE Transactions on Automatic Control, 2016, 61(4):905-920.
[8]MUJUMDAR A, TAMHANE B, KURODS S R. Observer-based sliding mode control for a class of noncommensurate fractional-order systems[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2504-2512.
[9]ATEN Q T, ZIRBEL S A, JENSEN B D, et al. A numerical method for position analysis of compliant mechanisms with more degrees of freedom than inputs[J]. Journal of Mechanical Design, 2010, 133(6):491-502.
[10]杨延勇. 汽车车身结构件设计与性能计算分析[J]. 机械工程与自动化,2018(2):117-119.
猜你喜欢
新视线·建筑与电力(2021年6期)2021-11-27
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
汽车实用技术(2020年4期)2020-04-10
科技风(2020年22期)2020-01-20
航空模型(2019年4期)2019-03-18
科技创新导报(2017年7期)2017-06-03
计算机应用(2016年10期)2017-05-12
科技视界(2016年27期)2017-03-14
山东青年(2016年12期)2017-03-02
