
关于系泊系统的设计研究
2017-06-03 23:03方舟张海舰杨延飞
科技创新导报 2017年7期
关键词:力矩
方舟++张海舰++杨延飞


摘 要:多成分系泊系统的设计研究涉及到力学、非线性方程组和优化理论。该文在对系泊系统进行受力和力矩分析的基础上,考虑可能存在“卧链”的临界情况,给出描述系泊系统各部分状态的非线性方程组,并用MATLAB软件进行求解,最终得到系泊系统中钢桶和各节钢管的倾斜角度、浮标的吃水深度和游动区域。
关键词:非线性方程组 优化理论 力矩 卧链
中图分类号:O312.3 文献标识码:A 文章编号:1674-098X(2017)03(a)-0025-02
1 数据的获取与相应的假设
该文中关于系泊系统各组成成分的数据均来自于2016年全国大学生数学建模题A题[1]。为了方便进行求解,故提出以下5条假设:(1)锚、重物球、电焊锚链所受浮力不计。(2)水流速沿水深无变化。(3)不考虑浮标倾斜变化。(4)锚链不发生弹性形变。(5)钢管与钢管之间可自由活动。
2 问题分析
多成分系泊系统的设计是一个较为复杂的现实问题,设计中不仅要考虑到浮标的游动区域,还要考虑到系泊系统中各项成分在海水中的具体姿态,以便人为对系泊系统各成分进行有效的控制。题设要求根据所提供系泊系统的各项参数,在海水静止的情况下,分别计算出海面的风速为12 m/s和24 m/s时系泊系统中各成分的关键参数。
那么就需要对系泊系统中的浮标、每节钢管、钢桶、锚链等部分进行受力分析,以及对系泊系统整体进行受力分析,建立关于系泊系统的受力分析数学模型。对所得到的数学模型进行分析求解,进而得到在不同风速条件下系泊系统所需求得的各项参数。
3 系泊系统中各刚体成分的受力分析
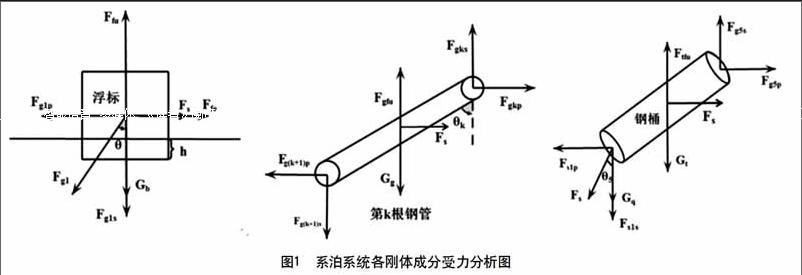
为了研究整个系泊系统中浮标、钢管、钢桶—重物球系统等刚体在风速以及海水速度条件下的各参数的变化规律,采用物理学中关于刚体的受力分析方法,将浮标、钢管、钢桶—重物球系统进行相应的刚体受力分析,进而掌握系泊系统中各刚体在海水中具体的状态和参数,以便于对接下来建立相应模型进行具体的求解。图1为系泊系统各刚体成分受力分析图。
假定海水静止,海面无风浪,各刚体的最终运动状态应为静止状态,根据图1中的受力分析,则可列出各刚体静止时的受力平衡方程如下。其中,Gb表示浮标的重力、Gg表示钢管的重力、Gt表示设备和钢桶的总重力、表示近海风荷载、Ffu表示浮标受到的浮力、Fgfu表示钢管在海水中受到的浮力、表示钢桶在海水中受到的浮力、Fgks表示第k根钢管受到第k-1根钢管的竖直分力、Fgkp表示第k根钢管受到第k-1根钢管的水平分力、θk表示第k根钢管受到第k+1根钢管力与竖直方向的夾角。
3.1 对浮标的受力分析
水平方向:
即近海风载荷对浮标在水平方向上的作用力Ffe与第一节钢管对浮标在水平方向上的作用力Fg1p大小相等方向相反。
竖直方向:
即水对浮标向上的浮力FfU与浮标本身的重力Gb及第一节钢管对浮标在竖直方向上的作用力Fg1S之和大小相等方向相反。
3.2 对第k根钢管的受力分析
水平方向:
即第k+1根钢管对第k根钢管在水平方向上的作用力与第k-1根钢管对第k根钢管在水平方向上的作用力大小相等方向相反。
垂直方向:
即第k+1根钢管对第k根钢管在竖直方向上的作用力与钢管自身的重力之和等于第k-1根钢管对第k根钢管在竖直方向上的作用力与海水对钢管的浮力之和。
力矩方程:
3.3 对钢桶—重物球系统的受力分析
水平方向:.
即电焊锚链对钢桶在水平方向上的作用力与第四根钢管对钢桶在水平方向上的作用力大小相等方向相反。
垂直方向:
即电焊锚链对钢桶在竖直方向上的作用力与钢球的重力、钢桶自身的重力之和等于第四根钢管对钢桶在竖直方向上的作用力与海水对钢桶的浮力之和。
力矩方程:
4 模型建立与求解
令β为锚链在锚点与海床的夹角。由于经典的悬链线方程[2]仅在β=0°时适用,故需对β=0°时系泊系统进行临界分析。而系统在竖直方向上受力情况为:
其中,wm表示锚链单位长度的重力,Gs表示锚链的重量。而在临界条件下,水中系统在竖直方向投影等于水深,即:
其中,lg表示钢管的长度,lt表示钢桶的长度,H表示锚链在竖直方向上投影额长度,h表示临界吃水的深度,θ1…θ4表示各节钢管与竖直方向上的夹角,θ5表示钢桶与竖直方向上的夹角。可得:
由(3)、(4)、(5)、(6)式得在临界水深的条件下临界风速为:
而题设风速均小于临界风速,此时假设图2线段为卧链长度,剩余锚链长度记为。含“卧链”的悬链线如图2所示。
依据(1)、(2)式,运用MATLAB软件求得系统各项参数为:=24.52 m/s。
当风速为12 m/s时,第1至第4节钢管的倾斜角度分别为0.974°、0.980°、0.985°、0.991°,钢桶的倾斜角度为1.004°,浮标的吃水深度为0.7348 m,浮标的游动区域为14.2195 m。
当风速为24 m/s时,第1至第4节钢管的倾斜角度分别为3.736°、3.759°、3.782°、3.804°,钢桶的倾斜角度为3.844°,浮标的吃水深度为0.7489m,浮标的游动区域为17.0978 m。
参考文献
[1] 2016年高教社杯全国大学生数学建模竞赛赛题[EB/OL].http://www.mcm.edu.cn/html_cn/node/6d026d84bd785435f92e3079b4a87a2b.html.
[2] 朱忠显,尹勇,杨晓,等.多成分悬链线锚泊系统的静力特性分析[J].大连海事大学学报,2015,41(4):1-7.
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
中国特种设备安全(2021年8期)2021-02-10
测控技术(2018年1期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
中国光学(2015年5期)2015-12-09
时代农机(2015年3期)2015-11-14
上海电机学院学报(2015年3期)2015-02-28
