基于风场环境利用的平流层浮空器区域驻留关键问题研究进展
2019-09-11 06:58邓小龙杨希祥麻震宇朱炳杰侯中喜
航空学报 2019年8期
邓小龙,杨希祥,麻震宇,朱炳杰,侯中喜
国防科技大学 空天科学学院,长沙 410073
临近空间是指介于传统航空器飞行高度和航天器轨道高度的空天结合区域,因其独特的大气环境和距地高度,蕴含着巨大的军事和民用价值,是当前国际竞争的前沿领域[1]。平流层浮空器是主要依靠浮升气体产生的浮力在平流层飞行的一类飞行器,是当前进行临近空间应用的重要技术平台,主要包括高空气球和平流层飞艇[2-4]。由于工作在气流相对平稳、垂直对流小的平流层环境,平流层浮空器具有驻空时间长、载荷能力大、使用效费比高等优点,可实现长期、实时、全天候、全天时的信息获取能力,可为对地观测、预警探测、通信中继、防灾减灾、环境监测、网络覆盖等应用需求提供解决方案,具有巨大应用前景[5-6]。
高空气球(见图1)是一类无动力平流层浮空器,是目前在临近空间开展科学研究与技术验证的主要平台[7-9]。随着囊体材料技术、超压技术等关键技术相继突破[10-12],高空气球的发展与应用日趋成熟[13-15]。但是,由于高空气球只能被动地随风飞行,主要通过动力学仿真来预估其飞行轨迹,难以对其飞行轨迹进行规划和控制,这也导致其在许多领域的应用受到了限制[16-18]。平流层飞艇(见图2)是一类依靠循环能源驱动动力系统进行可控飞行的平流层浮空器,可实现持久区域驻留[19-20]。但是,由于工作高度处的大气密度低,平流层飞艇体积庞大,具有显著大惯量、长时延等特点,飞行性能受环境(尤其是风场环境)影响较大,飞行控制难度大[21]。为执行飞行任务,平流层飞艇需要具备强大的动力和能源来克服风场影响,导致其动力分系统和能源分系统庞大而复杂,重量代价高,这也是目前平流层飞艇设计和应用所面临的一个重要问题[22-23]。同时,平流层飞艇技术还需要进一步突破材料、推进、能源、控制、超热超压等关键技术与核心问题[24-26]。

图1 NASA高空气球示意图[8]Fig.1 Schematic of NASA high altitude balloon[8]

图2 平流层飞艇Stratobus示意图Fig.2 Schematic of stratospheric airship Stratobus
对平流层飞艇和高空气球的综合分析可知,平流层飞艇的优势是可以实现自主寻航与定点驻留,不足之处是系统复杂程度高、总体与关键技术难度大;高空气球具备结构简单、实施灵活的优点,但由于飞行轨迹和区域难以控制,无法满足多数军事和民事应用要求。因此,将平流层飞艇和高空气球的优点结合起来的一类新型平流层浮空器在近年来受到广泛关注。
此类平流层浮空器的设计思想如图3所示:针对平流层底部存在东西风向翻转,且在东风带和西风带之间存在空间范围较大、时间上比较稳定的准零风层的特点[27-28],通过改变平流层浮空器驻空高度,主动地对不同高度风层的风场进行合理利用,以较小的能源和动力代价实现飞行器的区域驻留或轨迹规划[29-30]。在设计上,新型平流层浮空器结合了平流层飞艇和高空气球的优点,一方面,它采用了与高空气球相似的技术路线,继承结构简易、操作方便、成本低、安全可靠等特点。另一方面,对高空气球的控制系统进行了技术革新,可以充分利用平流层环境特征,克服高空气球在轨迹控制和高度控制上的局限性,通过对飞行轨迹的设计和控制,进而实现区域的长时驻留。
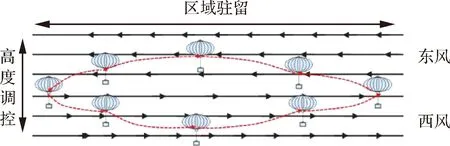
图3 基于风场利用的平流层浮空器工作原理图Fig.3 Principle of stratospheric aerostats based on wind field utilization
需要注意的是,风场环境受时域和地域的影响大,平流层准零风层的出现也有一定的时间和空间规律特点。例如,在中国低纬地区,一般冬季和初春有准零风层风场存在,中高纬地区则通常出现在春末和夏季,中低纬过渡区域的准零风层与准两年振荡有关[27,31]。因此,基于风场利用的平流层浮空器在应用中还应考虑环境约束的限制。
近年来,国内外研究人员对基于风场环境利用的平流层浮空器开展了大量的理论研究和实践探索,并取得了非常积极的成果。本文通过对典型军民项目的研究进展进行分析,梳理此类平流层浮空器所面临的核心问题,对目前提出的解决方案进行了分析,从实际应用的角度讨论了相关技术难题的可行解决方案。
1 典型项目研究进展
随着高空气球应用和平流层飞艇技术研究的不断推进,基于风场环境利用的平流层浮空器受到了广泛关注,并在理论研究和实践方面开展了大量工作,取得了非常多积极的、卓有成效的成果。典型项目包括民用领域进行商用化拓展的谷歌“Project Loon”项目和军用领域坚持理论攻关与试验验证并进的诺斯罗谱·格鲁曼“STRATACUS”项目。
谷歌气球“Project Loon”项目于2013年正式公布,旨在通过对大量平流层浮空器进行组网控制,构建平流层通信网络,实现区域持续覆盖,为全球范围内无互联网接入的农村或偏远地区提供快速稳定廉价的网络接入服务[32-33]。自提出以来,谷歌气球突破了诸多浮空器设计、制造的关键技术,并完成了大量的飞行试验,发展成为全球关注的创新研究项目。如图4所示,谷歌气球通过调控副气囊中的空气量来改变飞行高度,利用不同风层的风场进行区域驻留[34]。2013年6月,谷歌在新西兰2个发放点进行了首次公开测试,验证了利用30只气球提供互联网连接服务的可行性;2014年3月,谷歌气球实现了22天时间完成绕地球飞行的试验。通过对技术和工艺的不断提升,至2015年,单个气球创造了187天持续飞行记录,平均单个气球飞行时间超过100天;2016年,在巴西、澳大利亚、新西兰、斯里兰卡等国家大量试飞,在秘鲁实现了98天的区域驻留;2017年10月,向遭受飓风袭击的波多黎各提供紧急通信和网络覆盖支援;2018年7月,谷歌气球项目开始独立运营,并为肯尼亚偏远地区提供网络服务;2018年8月,验证7个气球进行数据传输1 000 km的关键技术。
诺斯罗谱·格鲁曼(诺-格)公司于2012年提出“SCN”(平流层通信节点)项目,后改名为“STRATACUS”(平流层C4ISR无人站)项目,如图5所示。该项目旨在通过对一定数量的平流层气球进行多网协作控制,为美军提供持久的战区宽域指挥、控制、通信、计算机、情报、监视和侦察(C4ISR)服务[35]。STRATACUS项目瞄准战场的快速区域信息保障需求,采用零压气球技术,通过模块化设计实现快速批量部署能力,可提前置于战略位置,并可根据需要经空中或地面快速运输至指定区域,可数小时内完成卸货、部署发放和抵达驻空位置,提供2个月以上的持久覆盖。2013年,完成概念可行性阶段工作,在美国空军基地完成了阶段飞行试验,验证气球吊舱内通信载荷提供通信和情报、监视与侦察的能力;2014年项目载荷为“阿拉斯加地盾”军演提供支持,验证其载荷的灵活性,以及其支持公共安全、应急响应及其他通信网的能力。目前,项目正处于位置保持算法、高度控制方法和系统能源设计等关键技术研究阶段,同时通过利用全球大气风场30年的数据,研究不同高度、高分辨率风场预测,以提供飞行规划或预测。

图4 谷歌“Project Loon”应用示意图Fig.4 Application schematic of Google “Project Loon”
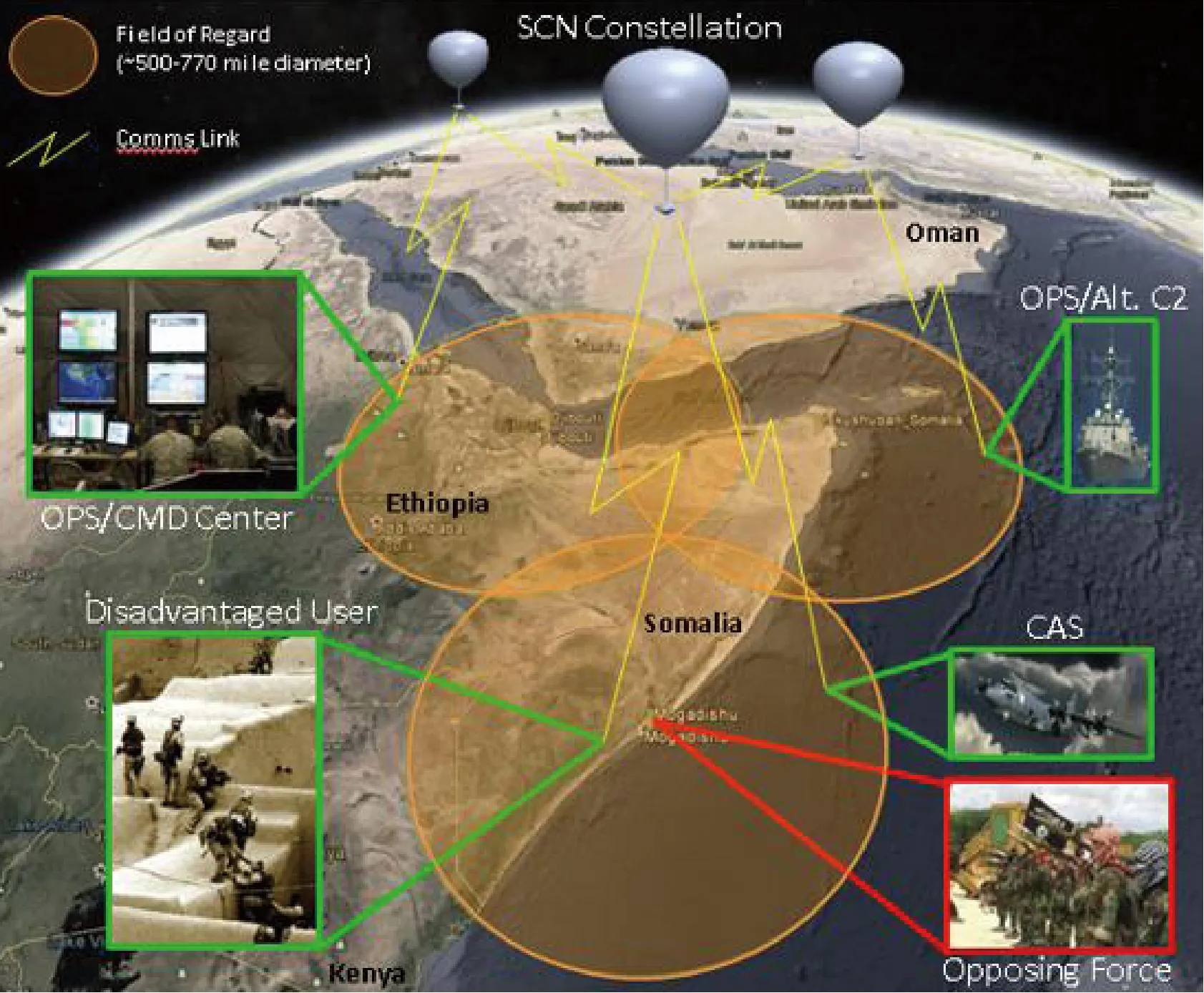
图5 诺-格STRATACUS项目应用示意图[35]Fig.5 Application schematic of Northrop Grumman “STRATACUS” project[35]
基于风场环境利用的平流层浮空器在设计上继承了高空气球的技术路线,在工程上继承了高空气球和平流层飞艇攻关成果,其系统复杂度较低,对能源、动力、控制、材料结构等关键技术的要求不高。实际上,随着长航时高空气球技术的不断突破,该类平流层浮空器在设计和加工中涉及的关键技术已经相对成熟,具备良好工程基础。但是,这种新型平流层浮空器在迈向实用化的道路上,仍面临一些与其工作原理相关的特有关键技术,如对风场感知/建模、风场利用方法、轨迹规划或区域驻留策略等。
2 风场感知/建模技术
基于风场环境利用的平流层浮空器的主要工作原理是对准零风层进行合理利用,其决策如何利用风场的重要前提是获取准确的准零风层的风场信息。当前,风场信息可通过风场测量/感知、风场预测/建模等方法来得到。
2.1 平流层风场测量技术
目前,各国已建立气象观测系统,可提供相应站点的高空风场观测,观测手段主要包括地基的风廓线雷达、激光测风雷达,以及基于探空气球的导航测风、无线电经纬仪测风、GPS测风等手段。基站式的探测系统通常测量精度较高,但受限于测量点约束,地面观测站的覆盖面是非常小的,在偏远地区、远海地区、发生灾难等应用地区则难以提供及时的风场观测信息。车载移动式风廓线雷达的最大探测距离一般只有几公里,且高度分辨率和风向探测精度较差[36]。激光测风雷达对于中低空风向风速具有较高的测量精度,但其系统复杂,对于高空风的探测还有待进一步发展成熟[37]。基于探空气球的测风技术(图6),主要是通过测量探空仪的运动速度来实现风向风速推算,通过系统位置速度变化换算风向风速存在一定延时,风向风速测量实时性较差,且在时间和空间上是离散测量,持续性不高[38]。因此,对于平流层浮空器广阔的应用区域,平流层原位风场感知测量技术是提供风场信息的有效手段。

图6 气球探空仪[38]Fig.6 Weather balloon with radiosonde[38]
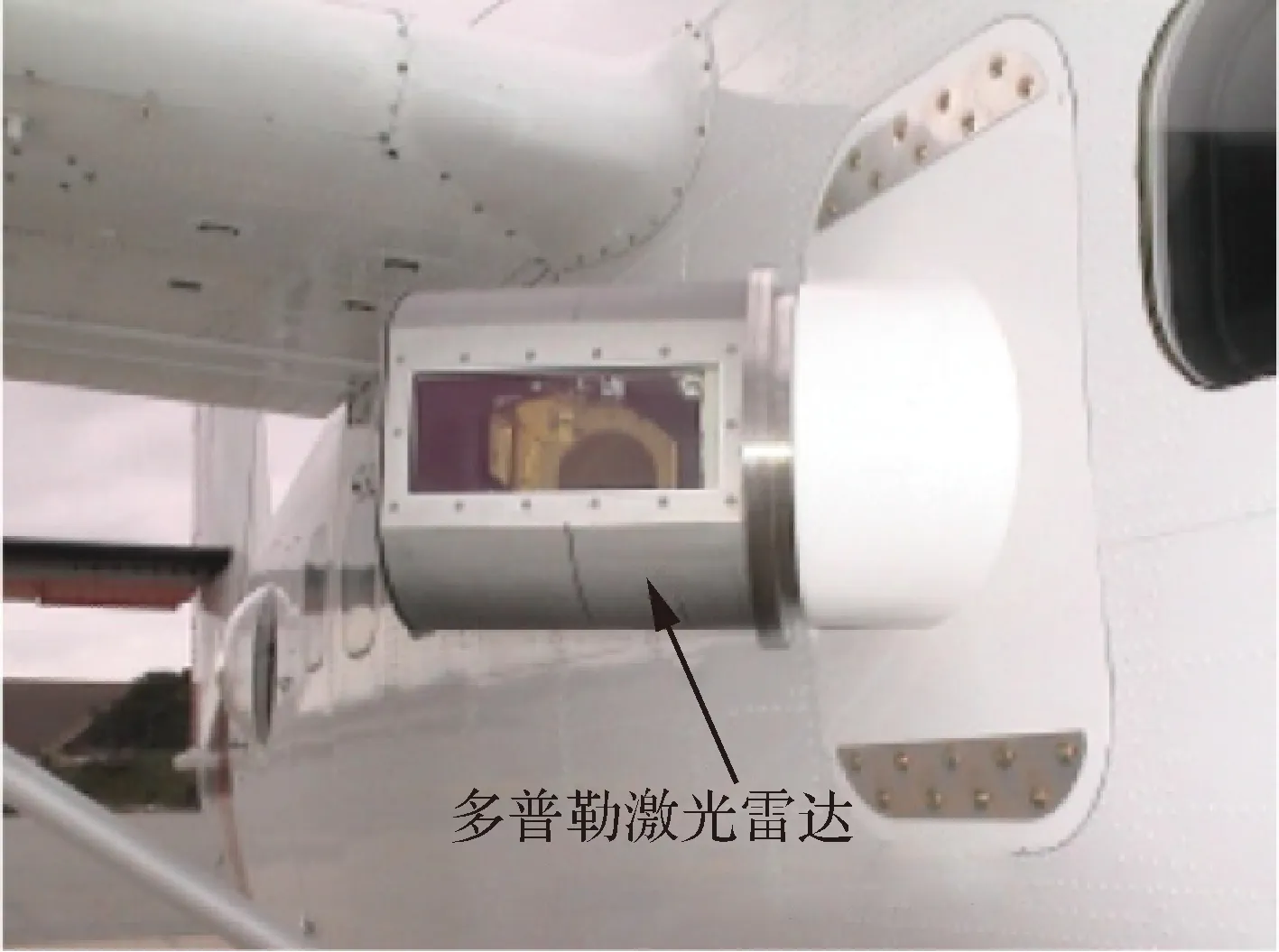
图7 机载多普勒激光雷达Fig.7 Airborne Doppler radar

图8 艇载超声波风速仪Fig.8 Airship-borne ultrasonic anemometer
用于实时风场感知的常规地面风速测量设备包括:叶轮式、皮托管式、热线/热膜式、激光多普勒式(图7)、超声波式(图8)等[39]。这些测风设备在地面或低空应用时,均可实现较高的精度。但是,平流层环境苛刻,例如20 km高度大气压仅为标准大气压的1/14左右,温度为-60 ℃左右,在高空稀薄的大气中飞行,其来流最大动压小于10 Pa,这也带来了特有的技术难点:满足低气压、低风速环境的高精度、高灵敏度传感器制造技术;适应低温、强紫外线和臭氧等恶劣环境条件的传感器防护技术;在长期驻空背景条件下,传感器可靠性设计、散热性能设计;飞行器运动姿态及扰动对探测数据的影响和修正问题;艇身绕流干扰与来流速度、迎角和风速仪安装位置密切相关(图9),艇身干扰修正问题[40];探测设备的功率及重量限制问题等。实际上,平流层风场原位测量是当前一个重要的研究方向,正在发展的技术包括:旋转增压风速仪、多普勒激光雷达等[41-42]。
图9 飞艇速度云图与艇载风速仪位置Fig.9 Map of airship speed and position of ultrasonic anemometer
2.2 平流层风场预测与建模技术
随着高性能计算机及数值模式技术的不断发展,数值天气预报系统具备了较高的准确率和时效性。但是,由于预报系统主要关注对流层和近地面的气象特征,对平流层底部附近风场的精细化预报度仍需进一步提高。
国外通常采用全球中期数值预报系统为平流层飞艇和高空气球提供气象保障,如采用美国环境预报中心(NCEP)的全球预报系统(GFS)[43]。要实现对平流层及以下大气的准确预报,一方面是提高模式层顶高度。欧洲中期天气预报中心(ECMWF)通过引入高精度有限元离散方法等技术,解决了模式垂直方向的高精度计算问题,将中期数值天气预报业务模式的模式顶延伸到约80 km[44];美国国家大气研究中心(NCAR)的全球天气研究和预报模式(Global-WRF)采用非静力框架,通过引入垂直嵌套,能对平流层下层以下的大气环境进行高分辨率模拟[45];美国海军研究实验室(NRL)已将其NOGAPS-ALPHA模式高度从大约35 km扩展至大约65 km。另一方面是相应地提高模式的水平分辨率,对于模式动力框架的升级不仅可全面提升模式的整体性能,也有助于提高模式对对流层-平流层相互作用的模拟能力[46]。目前全球数值预报模式的最高分辨率已达到 10 km 左右。
ECMWF的中期数值天气预报系统在2016年将全球中期确定性业务预报模式的水平分辨率提高到了9 km。NCEP的全球预报系统在2015年初将水平分辨率提高至约为13 km。但是,由于全球数值预报系统的难度及计算保障需求,对于临近空间飞行器设计与应用而言,气象预报系统通常作为一种保障手段和决策依据,对于飞行器在线控制和任务规划则需要有实时额外保障。
除了上述的数值预报系统,基于历史数据分析的平流层风场快速建模方法得到了关注,这为基于风场利用的平流层浮空器研究提供了有效手段[47]。该方法通常包括如图10 (a)所示的4步:① 历史数据收集与预处理,通过全球再分析资料产品库获取相应的环境数据并格式规范化处理;② 海量数据的降维处理,由于风场数据量大,所含的信息量阶数过多,常用降阶方法有本征正交分解(Proper Orthogonal Decomposition,POD)方法,通过获取风场最优标准正交基,可用少量阶数的标准正交基和投影系数来表征原风场信息;③ 风场预测模型建立,通常分别针对东西方向和南北方向的规律建立风场模型,如图10 (b)所示,使用Fourier预测模型可以对东西方向风场进行准确预测,预测精度与实际风场随时间变化的规律性有关[48],或如图10 (c)所示,使用BP(Back Propagation)神经网络算法对投影系数建模,通过训练学习对投影系数进行预测[49];④ 预测风场获取与模型更新,通过飞行轨迹进行风场反演,得到反演风场数据,融合反演风场对预测风场模型进行修正[50]。其中,预测风场建模方法和反演风场融合方法对于预测风场建模有重要影响,仍有待进一步研究。
图10 平流层风场快速建模方法Fig.10 Fast modeling method for stratospheric wind field
3 风场利用技术
3.1 基于高度调控的风场利用技术
基于风场环境利用的平流层浮空器的工作原理指出,为实现区域驻留,需要对不同高度风层的风场进行有效利用,这就要求飞行器具备快速进入指定风层的高度调控能力。根据浮空器驻空阶段的浮重平衡关系可知,改变其浮重状态的主要手段有改变系统所受浮力、改变系统所受重力。具体而言,目前浮空器高度调控方法主要有压舱物、外置副气囊、内置副气囊、浮力体体积调节等,其中压舱物调节是不可逆过程,主要用于实现有限次调控目的。
浮空器所受浮力由其体积及所处环境大气密度决定。通过体积调控,可对浮空器所受浮力进行控制,进而改变系统原有的浮重平衡。图11给出了几种典型的浮空器体积调控策略,包括直接对囊体体积进行调节,或改变气体温度进行间接体积调节。直接体积调节方案是通过变体积执行机构进行囊体体积调控。文献[51]中给出了一种在气囊内设置伸缩机构进行体积调控的技术方案(图11(a)),包括连接板、伸缩杆、连接座、电动绞盘和钢索,其原理是利用伸缩装置调节气囊内部的伸缩杆和连接板的角度来改变体积。如图11(b)所示,Voss和Riddle提出通过囊体表面经向拉伸机构进行南瓜形超压气球体积调控的技术方案[52],主要包括伸缩索、绞盘、稳定筋环等,工作原理是利用伸缩装置调节伸缩索,使得气球外形发生变化。图11(c)的方案是在浮空器主气囊内设置超压内囊体(或超压气罐),通过将浮升气体压入或放出超压囊体实现浮空器体积变化[53]。图11(d)中给出了对浮升气体温度进行调控的方法,通过温度改变实现浮空器的体积控制,该技术主要通过在囊体表面(或囊体内部)安装气体加热系统,根据需要控制加热系统的工作模式[35,54]。


图11 高度调控方案Fig.11 Methods for altitude control
总体而言,变体积技术方案的控制设计容易,但机构复杂度和重量代价较高;气体加热方法的机构简单,但需考虑热平衡过程,控制设计复杂。
基于浮空器系统重量调节的高度调控方法通常是将外界环境空气作为可重复利用的压舱物,控制空气的压入或释放实现重量调节和高度调节[55]。该调节系统主要包括副气囊、风机(或泵)、阀门等。当需要降低驻空高度时,通过控制风机将外界空气压入副气囊,增加系统重量;当需要升高驻空高度时,通过控制阀门释放副气囊内空气,减轻系统重量。相对于基于体积变化的高度调控技术,副气囊技术的系统组成复杂性和控制难度较低,其主要难度在于研制适用于宽工况高空环境的高效风机。图12给出了谷歌气球及其设计的专用压气机,实际上通过方案阶段对比研究基于浮升气体温度控制方法[54]和基于副气囊内空气量控制的高度调控技术[56],在设计出适用于高空环境的专用风机,采用了后者技术途径。
此外,多气球组合技术也为风场利用提供了新的技术途径。文献[57]给出了一种具备长航时驻空飞行能力的串联式气球系统。如图13所示,该系统由一个零压主气球与位于载荷下方的一个超压辅气球串联组成。通过一根可伸缩的悬挂绳可提高串联气球系统的驻空性能,在仅消耗少量能源的情况下改变主气球的驻空高度,使传统零压气球驻空高度波动的现象得以改善,还可利用不同风向的风层进行轨迹控制。双气球系统通过对主气球和辅气球协作规划,具有一定轨迹控制能力。一方面,通过调节气球之间的高度,可以控制主气球的驻空高度,进行风场的有效利用;另一方面,通过将主/辅气球处于不同的风场环境,可以通过二者之间的受力差异进行整系统的轨迹调节。需要注意,双气球系统的不稳定性和控制响应有待进一步研究。
图12 谷歌气球及其风机Fig.12 Google balloon and its pump
图13 双气球系统[57]Fig.13 Tandem balloons system[57]
3.2 基于气动帆牵引的风场利用技术
除了通过高度调控技术对不同高度层风场进行利用,研究人员还提出通过在气球下方悬挂类似于机翼的气动帆面的技术途径。如图14所示,通过控制气动帆面产生的力矩,带动浮空器相对于地面目标实现偏航控制,从而控制浮空器系统的飞行轨迹[58-61]。
文献[59]中的轨迹控制装置工作在平流层底部,利用该处风场产生的气动力来提供控制力矩,直接带动浮空器系统,控制其飞行轨迹,该系统主要包括机翼、尾翼和机身等,也称集成翼。机翼(包括副翼)是产生升力的主要部件,倒V型尾翼上有方向舵和升降舵。改变副翼的偏转角可控制集成翼的滚转,而控制集成翼的俯仰和偏航则需要同时改变方向舵和升降舵的舵偏角,两舵同时上偏或同时下偏起升降舵作用,偏转方向相反时起方向舵作用。文献[60]提出利用轨迹控制装置调整浮空气球高度,通过气球利用准零风层上下层纬向风反向的特点实现东西方向控制;利用轨迹控制装置产生经向控制力,通过系绳拖动气球实现南北方向控制。仿真结果指出,在一定的风场条件下,浮空器的位置和速度可以按照控制目标进行改变,能够实现在一定区域内驻留和机动飞行,但机动调整时间较长,南北方向控制精度较差。本技术的主要难点在于气动帆轨迹控制装置的控制方案,其中需要考虑浮空器系统与控制装置之间的牵引力、浮空器的受力情况等因素。

图14 气球轨迹控制系统Fig.14 Trajectory control system for balloons
3.3 基于动力微调的风场利用技术
由前文分析可知,在利用不同高度层的风场时,浮空器系统需要具备气球或控制机构的高度调控和相应决策等技术。而对于工作在特定高度的平流层浮空器而言,则无需考虑上述问题。为此,人们针对定高工作在弱风层或准零风层的平流层浮空器,提出了使用弱动力微调的技术方案[62-64],其基本思想是:仅当平流层浮空器处于不利于驻留的风场环境且将偏离工作区域时,通过系统携带动力系统进行微调处理,其余时间则利用该风场环境进行驻空飞行。考虑到气动阻力影响,可采用与高空哨兵(Hisentinel)类似的流线型设计和尾部推进布局[62]。
4 轨迹控制与规划
在风场感知/建模技术和风场利用技术研究的基础上,基于风场利用的平流层浮空器应通过合理的轨迹控制与规划方法进行区域驻留或按一定的轨迹飞行。虽然利用风场进行区域驻留的概念已经提出较长时间,但是直到近年来才受到较大的关注。
4.1 不同驻空策略的驻留能力
文献[48,65]开展了平流层浮空器面向指定驻留点的驻留策略研究,该方法根据浮空器当前位置计算其与设定驻留点的偏离,推算返回驻留点所需的风速和风向等条件,并以此为目标,对风场模型进行风层搜索,获取满足条件的风层结果,最后通过高度调控技术运行至目标风层。由于预测风场与实际风场的误差,平流层浮空器在控制规划下仍会偏离驻留点,因此需要不断地重复上述工作过程,修正偏离位置。图15给出了浮空器自由飘飞与基于指定驻留点策略的轨迹仿真结果对比[48],可以看出通过该策略能够将浮空器驻留在一定区域内。文献[65]对比分析了双气球系统和气动帆控制系统在3种不同风场环境下的驻留结果。结果指出,2种控制方法均可实现距离驻留点半径500 km的驻留,但2种技术的具体应用效能则受到所处风场环境影响。例如,当主气球高度处的风场弱时,则采用气动帆控制系统的平流层浮空器区域驻留性能更优;当副气球或气动帆高度风场与主气球风场相当时,则采用双气球系统的平流层浮空器区域驻留性能更优。
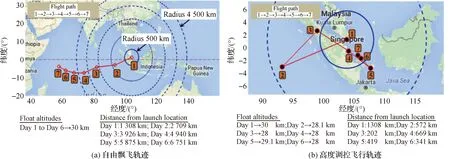
图15 自由飘飞轨迹与基于指定驻留点策略的浮空器轨迹对比[48]Fig.15 Comparison of trajectories between free flying and fix point strategy of stratospheric aerostat[48]
同时,面向一定驻留区域的驻留方法也得到了研究,目前主要是根据浮空器所在位置与驻留区域的关系进行决策。当超出驻留区域范围时,则需要调整至返回驻留区域的风层,否则不进行控制。相对于驻留点模式,该方法的约束范围更大,相应的控制策略和代价更小。文献[66]依据风场特征设置准零风层高度,将风场分为上层东风带和下层西风带,并对东西方向和南北方向分别进行控制。在东西方向上利用副气囊高度调控使得气球在不同风层运动进行风场利用,在南北方向上利用螺旋桨动力系统进行抗风,当浮空器超过设置的经纬区域要求时,则启动相应的调控手段。仿真结果指出,在一定条件内可实现大范围区域驻留。
在东西方向和南北方向分别控制的基础上,文献[67]提出了推进系统的2种工作模式:基于飞行速度约束控制和基于南北偏移位置约束控制。如图16所示,前者在高度调控利用风场的同时,使用推进系统将南北方向上的飞行速度控制在一定范围内,当南北风速小于该范围时,推进系统提供的空速与风速一致,当大于该范围时则动力推进分系统提供最大设置推进能力。后者是指,东西方向上的控制策略与基于推进系统速度控制模式类似,在南北方向上设置浮空器南北方向飞行范围,当浮空器在南北方向上的位置接近设定范围时,推进系统启动并抵抗南北风场的影响。研究结果指出,基于飞行速度约束控制模式在风速较小时,浮空器可以随风自由飘行,当风速较大时,通过推进系统对浮空器飞行速度进行控制,对推进系统的功率要求较低,但开启使用的时间较长,动力系统的控制回路要求高;基于南北位置约束是考虑在南北方向上浮空器与驻留中心的距离,当距离较大时,通过推进系统抵消经向风场的影响,对推进系统开启使用的时间较短,但对推进系统的功率要求较高。
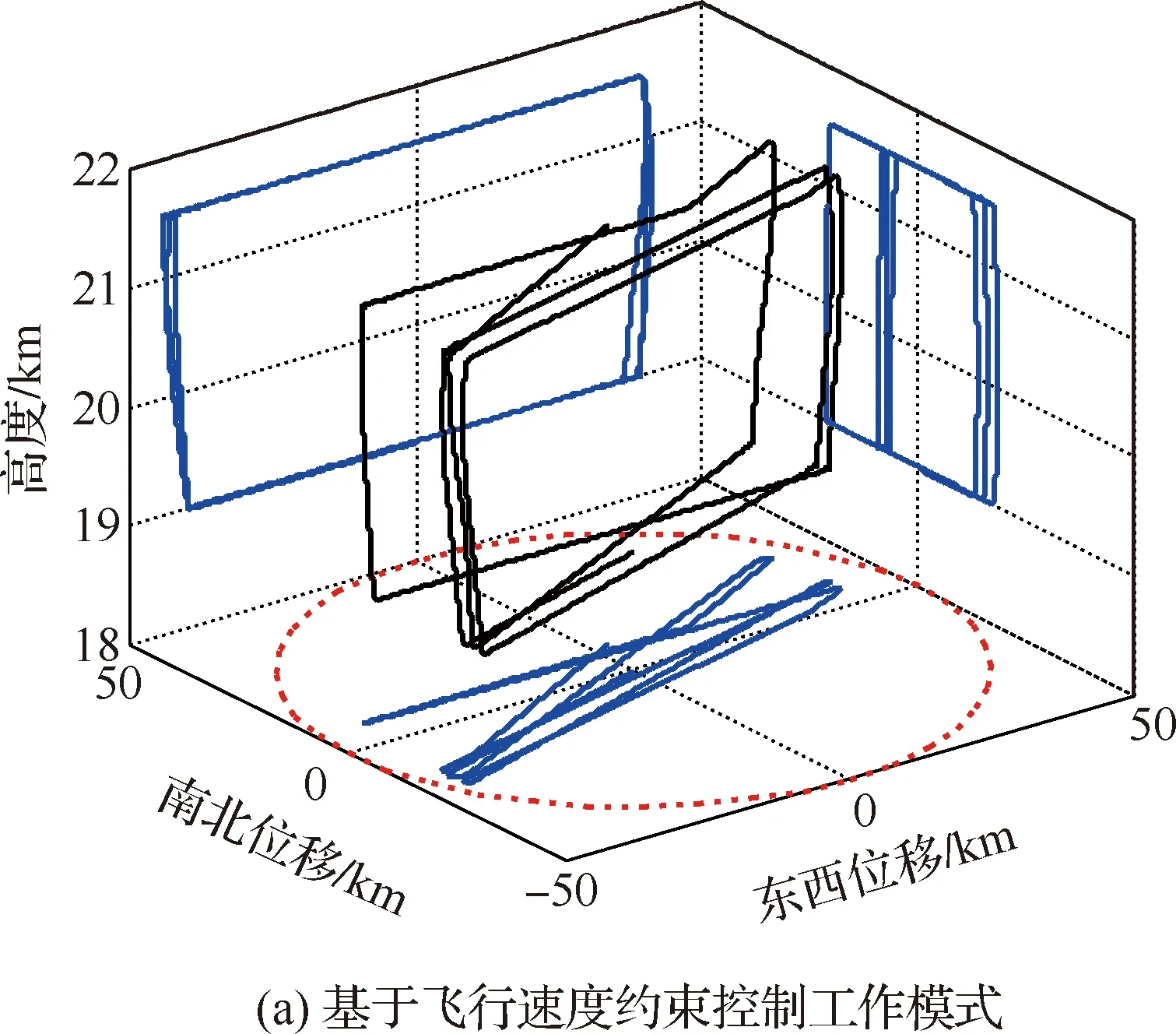

图16 基于速度约束和南北位置约束的平流层浮空器三维轨迹[67]Fig.16 3D trajectory of flying speed constraint and south-north position constraint strategy of stratospheric aerostats[67]
针对东西方向和南北方向独立控制对调控次数多和能源需求大的特点,文献[68]讨论了对风场综合利用的协同控制区域驻留策略,目的是更充分地利用风场能量,减轻推进系统的工作负担,降低系统能耗。该工作模式主要用于在驻空高度范围内径向风及纬向风均存在风向切变的情况,在南北方向也通过高度调控进行风场利用。通过对不同的东西和南北2个方向风场切变高度差的分析,结果指出:在切变高度相近风场条件下,与双通道独立控制策略相比,基于风场综合利用的协同控制策略对风场的利用效率更高,对动力系统的需求相对较小,系统总能耗低;在切变高度相对远离风场条件下,并未显著降低对动力系统的需求,且大幅增加了高度调控系统的工作,导致系统总能耗与独立控制策略的情况相当,表明风场的综合利用程度取决于东西风切变与南北风切变高度差。
综上可知,现有研究主要集中在基于动力学模型的仿真分析,还应进一步开展风场利用机理研究,引入智能决策方法提高风场利用能力相关研究。
4.2 考虑环境与平台特征的驻留能力
由于其特殊的外界环境和技术特点,平流层浮空器的驻留能力受多种外界因素的影响。文献[69]对比分析了基于POD方法的Fourier级数风场预测模型与BP神经网络风场预测模型对平流层浮空器区域驻留能力的影响。结果指出,风场预测模型精度对于区域驻留工作特性有重要影响。由于神经网络算法考虑了误差反向传播,对未来短期风场预测精度更高,使得平流层浮空器的规划轨迹与实际轨迹偏差小,可降低浮空器的调控需求,高度调控过程中所消耗的能源降低,同时也减小对阀门和风机的性能要求。
现有研究通常假设球体为刚体,实际上,浮空器驻空时面临着超热超压现象[70],囊体材料在超压作用下会受到应力作用,材料发生延展,进而对气球体积产生影响。文献[71]对直径24 m超压气球的研究指出,浮空器氦气昼夜温差达46.5 K,相应的昼夜超压量分别为241.7 Pa和1 000 Pa,导致球体体积在7 389~7 876 m3的范围内变化,驻空高度会发生400 m的起伏,基于长沙地区实际风场的轨迹分析指出,驻空阶段的轨迹呈现出西南-东北方向往返飞行现象,这也为平流层浮空器的区域驻留研究提供了新思路。
5 结 语
本文以基于风场环境利用的平流层浮空器为研究对象,综述了最新典型项目的研究情况,并在此基础上梳理了此类平流层浮空器区域驻留的关键技术,重点讨论了风场感知与建模、风场利用以及轨迹控制与规划等核心问题。在风场感知与建模技术中,重点讨论了利用历史风场数据进行风场建模的方法,并提出风场模型预测精度提高的思路。在风场利用技术中,重点讨论了新型平流层浮空器的高度调控技术、气动帆牵引技术、动力微调技术,对比分析了各方案的技术特点和难点。在轨迹控制与规划技术中,重点讨论了当前平流层浮空器风场利用策略的研究进展,并讨论了智能化决策方法在基于风场环境利用的平流层浮空器区域驻留的可行性。本综述对当前提出的解决方案进行讨论,从实际应用的角度探讨了相关技术难题的可行解决方案。
猜你喜欢
科学导报(2022年42期)2022-07-13
北京航空航天大学学报(2022年5期)2022-06-06
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
大气科学学报(2022年2期)2022-05-12
大气科学学报(2022年2期)2022-05-12
科技研究·理论版(2021年20期)2021-04-20
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代农业科技(2019年8期)2019-09-06
环球时报(2019-08-20)2019-08-20