
六自由度机器人本体设计及轨迹虚拟仿真
2019-09-09 13:33王晓丽孙晓莉
数码世界 2019年6期
王晓丽 孙晓莉

摘要:随着科技的发展,机器人技术已经用在各行业,尤其在工业生产制造领域,机器人技术是高科技的体现。本文设计7六自由度工业机器人身体的各个构件,并对其进行运动学分析,并建立动力学数学模型,最后用Matlab仿真软件模拟其运动轨迹。最终得到六自由度工业机器人身体各关节随时间变化曲线。
关键词:工业机器人运动学动力学运动轨迹Matlab仿真
引言
20世纪50年代末第一台工业机器人诞生于美国,随着工业机器人技术的发展,机器人技术更加智能化,我国的机器人技术起始于20世纪70年代,目前我国的机器人技术在汽车制造业方面得到了广范使用。纵观国内外现状,工业机器人技术是新世纪世界各国发展的重要的高新技术之一。
1本文的研究意义
机器人轨迹是机器人在实际工作过程中,根据工作要求所走的路线。在其行走过程中末端执行器关节随时间的变化。本文对机器人行走轨迹规划,对提高运动效率和控制精度有很重要的作用。本次设计采用虚拟技术,缩短机器人试验研发周期,达到化繁为简从而对对虚拟仿真模型控制,达到研究目的。
2本文主要研究内容
设计六自由度机器人,并对机器人模型参数建模,用运动学知识推算机器人运动轨迹,以及对各项运动参数建模,用仿真软件对机器人本体运动验证,使其达到设计要求。
3六自由度工业机器人的结构设计
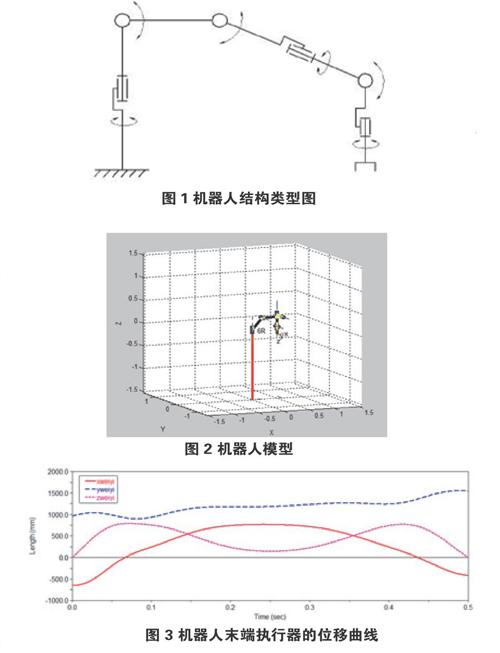
该机器人结构包括:底座、腰部回转部件、大臂部件、小臂部件、手腕部件、手部部件、六个轴,其中三个旋转轴,三个摆动轴。采用步进电机驱动机器人的各个关节,通过计算传动装置的参数,完成机器人整体结构的装配。确保了本次设计在实际工况中运行的可靠性。从而达到控制要求。总体设计如图1所示。
4六自由度工业机器人的运动学分析
机器人正运动学分析:本次设计的机器人采用开环连杆机构,通过调节机器人各关节变量,推算各关节的相对位置,使机器人以不同的位姿到达其运行位置。建立相邻关节坐标系,各关节之间的矩阵,求出末端位姿。
5机器人动力学分析及轨迹规划
5.1机器人动力学分析
机器人动力学方法有很多,本文采用拉格朗日方法进行六自由度机器人动力学分析[3],在分析机器人动力学过程中忽略机器人各关节部件之间的摩擦力。
矩阵形式如下:
综上所得建立其动力学参数模型。
6机器人运动学动力学以及轨迹仿真
6.1机器人运动学仿真
本文运用matlab的Rob。tlCs T。olbox模块对机器人运动学仿真。和该系统的运动特性理论上分析。
6.2机器人动力学仿真分析
机器人动力学采用adams软件仿真,末端位置Marker的位移曲线如图3所示:
6.3機器人轨迹规划仿真
本文运用matlab对所设计机器人的运动路径仿真,仿真结果如图4所示:
从图4可知在该段轨迹中机器人各关节随时间变化曲线。
7小结
通过机器人设计并仿真满足本文要求设计。本次设计具有可行性,可以达到国内领先。
参考文献
[1]陈成,六自由度工业机器人虚拟设计及仿真分析[D]:南京信息工程大学,2013.
[2]王鸿鹏,杨云,刘景泰.高速移动机器人的研究现状与发展趋势.自动化与仪表,2011,26(12):14.
[3]徐扬生,智能机器人引领高新技术发展,科学时报,2 010,(8):1-4.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
科学与财富(2020年6期)2020-05-19
小学语文教学·会刊(2019年2期)2019-09-10
智富时代(2018年1期)2018-03-26
智富时代(2018年1期)2018-03-26
文教资料(2017年15期)2017-09-18
中学生理科应试(2017年7期)2017-08-09
新高考·高一物理(2016年11期)2017-07-07
中学物理·高中(2016年8期)2016-08-08
电脑爱好者(2016年9期)2016-05-16
