基于显著几何特征的古木建筑关键构件多LoD尺寸信息提取方法
2019-09-09 03:35:50石力文解琳琳侯妙乐李爱群胡云岗刘浩宇
图学学报 2019年4期
石力文,解琳琳,侯妙乐,李爱群,胡云岗,刘浩宇
基于显著几何特征的古木建筑关键构件多LoD尺寸信息提取方法
石力文1,2,3,解琳琳1,4,侯妙乐1,2,3,李爱群1,4,胡云岗1,2,3,刘浩宇1,2,3
(1. 北京未来城市设计高精尖创新中心,北京 100044;2. 北京市建筑遗产精细重构与健康监测重点实验室,北京 100044;3. 北京建筑大学测绘与城市空间信息学院,北京 100044;4. 北京建筑大学土木与交通工程学院,北京 100044)
古木建筑关键构件的尺寸信息是其安全性能评估与提升、历史文化传承的重要基础,然而该信息的提取尚缺乏高效、高精度的方法。三维激光扫描的精细测绘技术为该问题的解决提供了科学手段,但点云数据体量庞大,无法直接获取尺寸信息。针对尺寸信息的多细节层级(LoD)特性,提出了多LoD模型标准,建议了相应的显著几何特征参数。结合高保真点云数据,系统地提出了一套基于点云数据的关键构件多LoD尺寸信息自动化提取方法,可准确、高效地提取多LoD尺寸信息。对典型关键构件进行了多LoD尺寸信息提取,该方法可在7 min内完成百万级点云数据的信息提取,且尺寸相对误差不超过2%,绝对误差绝大部分小于0.5 mm,验证了该方法的高效性和可靠性。
古木建筑关键构件;LoD模型;显著几何特征;点云数据;自动化提取方法
我国木建筑历史悠久、类型多样且体系完整,具有极高的历史、文化和科学价值[1]。以应县木塔为例,其是世界古木建筑遗产的典范。如何高效、精准地记录古木建筑的形态现状和构件损伤现状[2-3],即明确各类构件的尺寸信息,是安全性能评估与提升,以及历史文化传承的重要基础。
在安全性能评估与提升方面,数值模拟已逐渐成为结构安全性能评估与提升的重要手段。采用精细模型可反映微观损伤机理,但需要高精度的尺寸信息,建模工作量大且分析效率低。采用简化模型则可显著提升建模和分析效率,其往往只需要关键尺寸信息,但无法充分反映斗栱等构件细节对结构微观损伤机理的影响。多尺度数值模型的发展解决方法[4],其基本思想是对于重要的关键子结构或构件采用精细模型,对于次要构件则采用简化模型。以应县木塔为例,倾斜严重的二层明层是结构的薄弱层,应视为关键子结构采用精细模型,其余楼层相对完好,可采用简化模型。古木建筑遗产的现状特性符合多尺度数值模型的应用条件,重要性程度不同的构件可采用不同尺度的模型,准确、可靠的多细节层级(level of details, LoD)尺寸信息是建立多尺度数值模型的重要基础。
在历史文化传承方面,现有资料大都为二维建筑图,暂不存在尺寸信息完备的结构图。三维激光扫描等技术的发展为这一难题的解决提供了更为科学的手段。该技术能够以点云的形式高保真、高精度地采集目标表面的阵列式空间点位信息,可为各类构件多LoD尺寸信息的提取奠定基础。然而,点云数据是由构件表面上数以万计的单点组成,而多LoD尺寸信息数量远少于点云数据量。值得注意的是,古木建筑中的关键构件大都为标准构件,其截面形式和连接方式较为固定,即存在一定规律性和重复性的显著几何特征[5-6],可采用特定的显著几何特征参数对其关键信息进行表征。将三维激光扫描技术应用于建筑遗产保护的关键核心是,如何基于海量精细点云数据,提取不同尺度模型所需的显著几何特征。
考虑到点云数据不包含实体特征信息,无法确定数据点在物体表面的具体位置,如何对古木建筑关键构件的点云数据进行特征提取成为一个热点和难点问题[7-11]。具体而言:①古木建筑构件形式不同于传统构件,其形态相对特殊,目前针对此类构件特征提取的研究相对较少;②古木建筑构件目前尚未有表达LoD的模型标准,也不存在与之相对应的显著几何特征参数;③点云数据量庞大且点分布不均匀,从点云中自动、高效、高精度地提取显著几何特征参数的相关研究仍相对较少。值得注意的是,残损信息对于古木建筑的数字化留取、安全性能评估与提升较为重要,但考虑到对于古木建筑多LoD信息留取尚处于初步阶段,所以本文在此暂不考虑其影响,对较为理想的无损构件展开研究。
面向古木建筑遗产保护与发展的迫切需求,针对如何高效、精准地提取关键构件多LoD尺寸信息这一关键难题,本研究首先提出了适用于古木建筑关键构件的多LoD标准,建议了可表征多LoD尺寸信息的显著几何特征参数。在此基础上,结合精细测绘获得的海量高保真点云数据,系统地提出了一套基于点云数据的关键构件多LoD尺寸信息自动化提取方法。通过对典型关键构件进行多LoD尺寸信息提取,验证了该方法的高效性和可靠性。
1 关键构件多LoD模型标准
如何根据构件模型的不同精度需求,基于海量点云数据提取少量尺寸信息是本研究的难点问题。CLARK[12]提出的LoD技术是有效解决这一矛盾的通用方法之一。LoD概念来源于计算机图形学,其根据实际计算能力以及需求选择合适的细节层级进行渲染。随着LoD层级的提升,表达构件模型所需的显著几何特征会有所增加,使得模型能够更精准地反映构件的关键信息。
建筑信息模型(building information modeling,BIM)已建立了较为完善的现代木结构LoD分级标准,然而现代木结构与古木结构存在2方面的差异:①构件形式;②构件连接方式。古代木结构采用复杂的榫卯连接,现代木结构大都采用钢连接件连接。因此有必要借鉴现代木结构BIM模型的LoD分级标准,结合古木建筑关键构件的典型特征,提出相应的多LoD模型标准。
本文提出了适用于古木建筑关键构件的多LoD模型标准:①LoD100:借鉴已有BIM构架,反映构件的体量信息(如长度、宽度、高度等信息);②LoD200:反映构件的主要结构尺寸信息,忽略一些建筑造型所引起的特殊尺寸(如卷杀等),可满足基本的结构安全性能分析需求;③LoD300:反映构件的详细尺寸信息,可同时满足精细模型建立需求和文化传承需求。
为了准确表达不同层级的模型,需指定各层级所需的显著几何特征参数。本文对关键构件进行了分析,建议了可表征多LoD尺寸信息的显著几何特征参数,初步形成了古木建筑关键构件的多LoD体系。表1给出了部分关键构件的多LoD模型及其显著几何特征参数。

表1 古木建筑关键构件多LoD模型及其显著几何特征参数
2 基于点云数据的关键构件多LoD尺寸信息自动化提取方法
本文研究核心是如何从海量点云数据中提取表达不同LoD模型所需的尺寸信息。基于三维激光扫描技术获取的关键构件点云数据量大,难以直接进行多LoD尺寸信息提取,为此本文提出了基于点云数据的多LoD尺寸信息自动化提取方法(图1)。
其步骤如下:
(1) 由体到片——点云切片算法。考虑到关键构件具有典型的截面特性,可根据构件的不同特征需求进行点云切片处理。将点云对象精简为片状点云,提高后续轮廓线提取的精度与效率,并采用了一种基于投影面的点云切片算法。
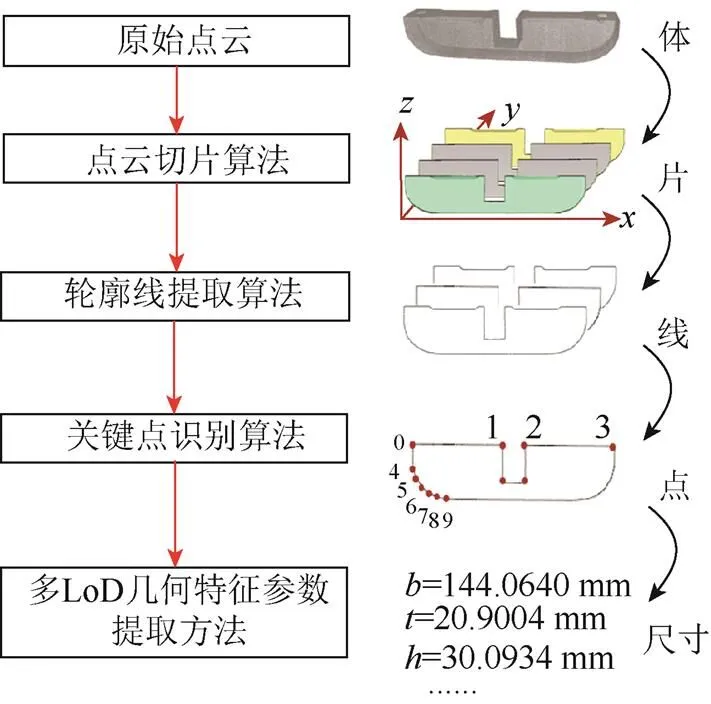
图1 方法整体思路
(2) 由片到线——轮廓线提取算法。关键构件的轮廓可通过几何特征点进行表征,步骤(1)获得的片状点云通过精简可获得清晰的轮廓特征,提取表征轮廓线的几何特征点,为进一步提取确定多LoD尺寸信息的显著几何特征点奠定基础。本文采用了基于点云聚类技术的轮廓线提取算法。
(3) 由线到点——关键点识别算法。表征轮廓线的几何特征点之间一般存在特定几何关系,通过精简获得关键点,为多LoD尺寸信息的提取奠定基础。本文采用了基于3D Harris的关键点识别算法。
(4) 由点到信息——多LoD显著几何特征参数提取方法。尺寸信息可通过提取显著几何特征参数获得,不同的显著几何特征参数表达不同的LoD模型。本文基于步骤(3)获取关键点,逐级提取,得到了一种多LoD显著几何特征参数提取方法。
2.1 点云切片算法
由于点云数据具有采样密度大、速度快、易受环境和系统等因素影响的特点,对原始点云直接进行特征提取将会影响算法的质量和效率,因此一般需要首先对点云数据进行预处理。本文通过点云去噪、配准、重采样以及坐标变换,将点云模型变换至中心线平行于轴正方向且底面平行于平面的方向上,获得可用于切片的关键构件点云模型。
考虑到关键构件具有典型的截面特性,切片算法可在准确反映构件截面特征的同时,有效提高轮廓线和显著几何特征点的提取效率,本文采用一种基于投影面的点云切片算法(图2)[13]。该算法主要通过提取一定厚度的点云,将其投影到中心面上实现对点云数据的切片处理,切片精度与效率均较高。具体方法为,首先对点云的特征进行分析,选择合适的切片法向矢量方向。根据不同特征可选取多个方向分别进行切片(本文选择轴方向),计算点云在切片方向坐标的最大值max及最小值min,设置个分层,则切片距离patch|max–min|,依次等间距提取组点云;然后生成组与切片方向相同的投影平面,投影平面为每组点云的中心面;最后将组点云分别投影到其对应的平面上作为切片点云。
在点云切片算法中,点云分层个数是关键参数,其取值对精度影响较大,因此需合理设置该参数。为了确定的合理取值,本文以泥道栱构件进行切片实验,按照材分制中单位“分”为2 mm制作、厚度为150 mm左右、点云密度为0.2 mm,并分别设置切片个数为300,200,150,50,30,使切片距离patch为0.50 mm,0.75 mm,1.00 mm,3.00 mm,5.00 mm,沿着厚度方向切片,计算第1片切片的算法运行时间和点云个数,对比数据质量,从而确定合理取值。
结果表明,当值较大时会使得每组点云厚度较小,丢失点云的截面特性,无法体现出点云轮廓;如果取值过小则会使投影出的片状点云模型包含数据较多,容易忽略细节。较大的点云厚度对尺寸提取的精度并没有太大变化,对效率影响较小。总之,建立古木建筑精细化数值模型对构件尺寸的精度需求为毫米级[3],建议取值满足切片厚度patch不小于点云密度的5倍和材分制基本单位的较小值,本文patch取值为1.00 mm。

图2 点云切片算法流程示意图
2.2 轮廓线提取算法
基于点云切片算法获得的片状点云数据仍比较庞杂,需进一步提取可表征其轮廓线的几何特征点。轮廓线特征点具有与内部点不同的特点,轮廓点邻域必存在一侧没有数据点,而内部点的邻域点分布则相对均匀。因此,可通过判断点云数据邻域点的分布密度来提取轮廓线[14]。
基于大量点云提取轮廓线时,如果采用直接对片状点云模型进行判断的传统方法,需遍历片状点云模型包含的所有点,逐个计算其邻域点的分布密度,运算效率低,且轮廓特征点存在重叠现象会影响提取的精度。为解决这一问题,本文采用了基于点云聚类技术的轮廓线提取算法(图3)[15],首先使用K-D树的方法对数据进行组织,在计算分布密度前进行一次点云聚类,以点云重心为中心对片状点云模型进行聚类处理,仅保留核心对象,排除非关键点的影响,可显著提高轮廓线提取的精度和效率。
提取轮廓线点云模型的总体思路为:
(1) 设定K-D树的搜索半径,并进行点云聚类;
(2) 计算各点法向量。以点法向量构造最小二乘平面,并将点及其邻域点投影到最小二乘平面上。计算各点与邻域点法向量的夹角,比较连续夹角间的差值,且选择最大夹角差作为迭代结束的条件;
(3) 设定阈值。遍历所有点,判断最大夹角差是否大于阈值,满足条件的为轮廓线特征点,反之则为内部点,最后将轮廓线特征点存储为新对象,得到轮廓线点云模型。
值得注意的是,角度阈值是判断轮廓线几何特征点的关键参数,其取值对精度影响较大,合理设置角度阈值,可以使轮廓线提取算法具有较高的精度。为了确定合理的取值范围,本文将角度阈值分别设置为π/4,π/2,π,2π并进行试算,结果表明轮廓线点云数量在阈值为π/4和π/2之间维持稳定,偏于保守可将该值取为π/4。

图3 轮廓线提取算法流程示意图
2.3 关键点识别算法
确定多LoD尺寸信息的显著几何特征点往往存在于边缘角点等部位,需要进一步精简基于轮廓线提取算法获得的轮廓线点云模型。本文采用了一种基于3D Harris的关键点识别算法,该算法对物体姿态变化鲁棒性好,并且对旋转不敏感,可以很好地检测出物体的角点[16],能够满足本研究的预期效果。
该算法的基本思想是使用一个固定窗口在对象上进行任意方向上的滑动,比较滑动前后窗口包含的点云数量变化程度,如果点云数量在任意方向上均发生了较大变化,可认为该窗口中存在角点(图4)。需注意,在2D Harris中,计算移动窗口的灰度差值时,使用了图像梯度构成的协方差矩阵,本文利用点云法向量构成的协方差矩阵,替换图像中的协方差矩阵,即可拓展获得适用于三维点云的3D Harris算法,又可用于识别关键点。

图4 关键点识别算法流程示意图
值得注意的是,滑动窗口的半径是影响算法准确度与效率的关键参数,其取值对精度和效率影响较大。为了确定合理的取值范围,本文通过大量试算,建议将窗口半径取为20~35倍的点云密度,即为4~7 mm之间,对于后续案例,偏于保守的取值为4 mm。
2.4 多LoD模型显著几何特征参数提取方法
基于2.3节获得的关键点,根据各点之间的几何关系,逐级提取不同LoD模型的显著几何特征参数,形成了一种多LoD模型显著几何特征参数的提取方法。
(1) LoD100模型显著几何特征参数提取。LoD100模型的显著几何特征参数用于描述构件模型的体量信息,包括四棱柱的长度、宽度和高度。本文通过内省式排序的方法计算得到各个坐标方向的最大值和最小值[17],进而对其求差,得到LoD100模型的长度、宽度和高度,即
=max–min(1)
=max–min(2)
=max–min(3)
(2) LoD200模型显著几何特征参数提取。其用于描述构件模型的主要结构尺寸信息,由于不同构件描述轮廓所需的参数存在差异,所以LoD200模型参数的提取方法因构件而异。古木建筑关键构件具有典型的轮廓特性,即直线,连接部位主要通过凹槽的方式,可通过长度、厚度和深度表达。
本方法选取直线两端特征点,计算直线长度。其中连接方式为凹槽的部分(图5),选取控制凹槽形状的边界点和深度点,计算凹槽长度和深度(一般情况凹槽厚度与构件宽度一致),选取控制凹槽位置的任一角点,计算凹槽角点至与其相邻模型角点的距离。

图5 凹槽显著几何特征参数
(3) LoD300模型显著几何特征参数提取。其用于描述构件模型的详细尺寸信息,相比于LoD200模型主要增加了建筑特征信息。该类信息大致可分为2类,一类轮廓线为直线,另一类则呈现出一定的弧线特征。对于第1类处理方法仍采用LoD200的提取方法。对于第2类,构件的端部往往做成缓和的曲线或折线,营造法式上称为“卷杀”。卷杀可通过作图法表达(图6),其将构件端部沿高度和长度方向均分为相同份数,并沿两方向将各段端点自1至进行编号(图6);高度方向的1,2,···,点分别与长度方向的1,2,···,点采用直线连接;各线段相交后连成的折线,即为卷杀的边缘轮廓线。根据卷杀的起点和终点(可直接提取获得的特征点)坐标计算其高度和长度,结合营造法式确定,进而计算卷杀多段线折点的坐标来表达轮廓。

图6 卷杀示意图
3 算法验证
本文基于Visual Studio 2013开发环境,采用C++语言与PCL1.7.2点云库相结合编写了上述算法的程序。为了验证该方法和相应程序的可靠性,本文以栌斗和泥道栱为实验对象(图7),使用FARO Edge测量臂扫描仪分别获取了4 654 940和3 762 778个点云数据,在Intel(R) Xeon(R) CPU E5-1603 v3 @ 2.80 GHz,RAM (12.0 GB),Windows 7专业版64位操作系统配置环境下,针对关键参数的取值展开讨论,并采用该程序提取多LoD模型显著几何特征参数。
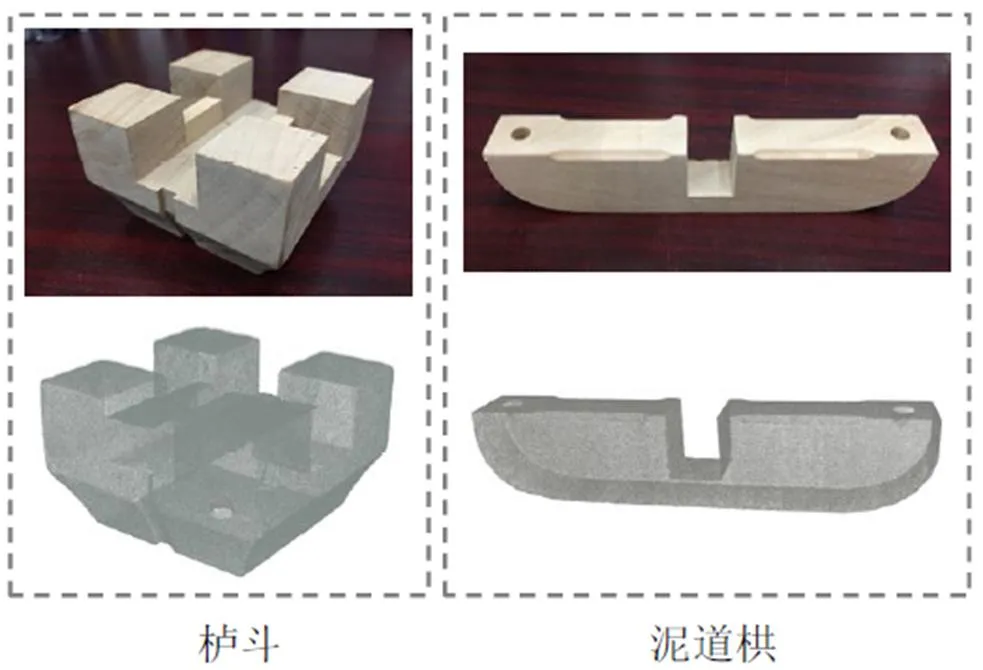
图7 实验对象
本文将提取的结果与实际数据进行对比,定量评价本文算法的精度,栌斗和泥道栱实验的结果对比分别见表2和表3。从表中可以看出,本文方法的提取结果与实际数据之间的绝对误差绝大部分小于0.5 mm;相对误差均未超出2%,局部小尺寸的相对误差为3.15%,绝对误差为0.244 5 mm,在误差可接受的范围内,整体精度较高,可满足本文研究的精度需求。另外,本文根据算法提取的尺寸信息正向建立构件的BIM模型,将其与原始点云模型进行三维偏差对比,结果如图8所示,最大距离均未超过1.8 mm,平均距离均未超过0.1 mm,标准偏差未超过0.5,整体偏差较小。验证了本文基于显著特征参数的表达方法的合理性和可靠性。另泥道栱和栌斗实验的耗时分别为374.137 s和170.352 s,表明本文方法精度好且效率高。
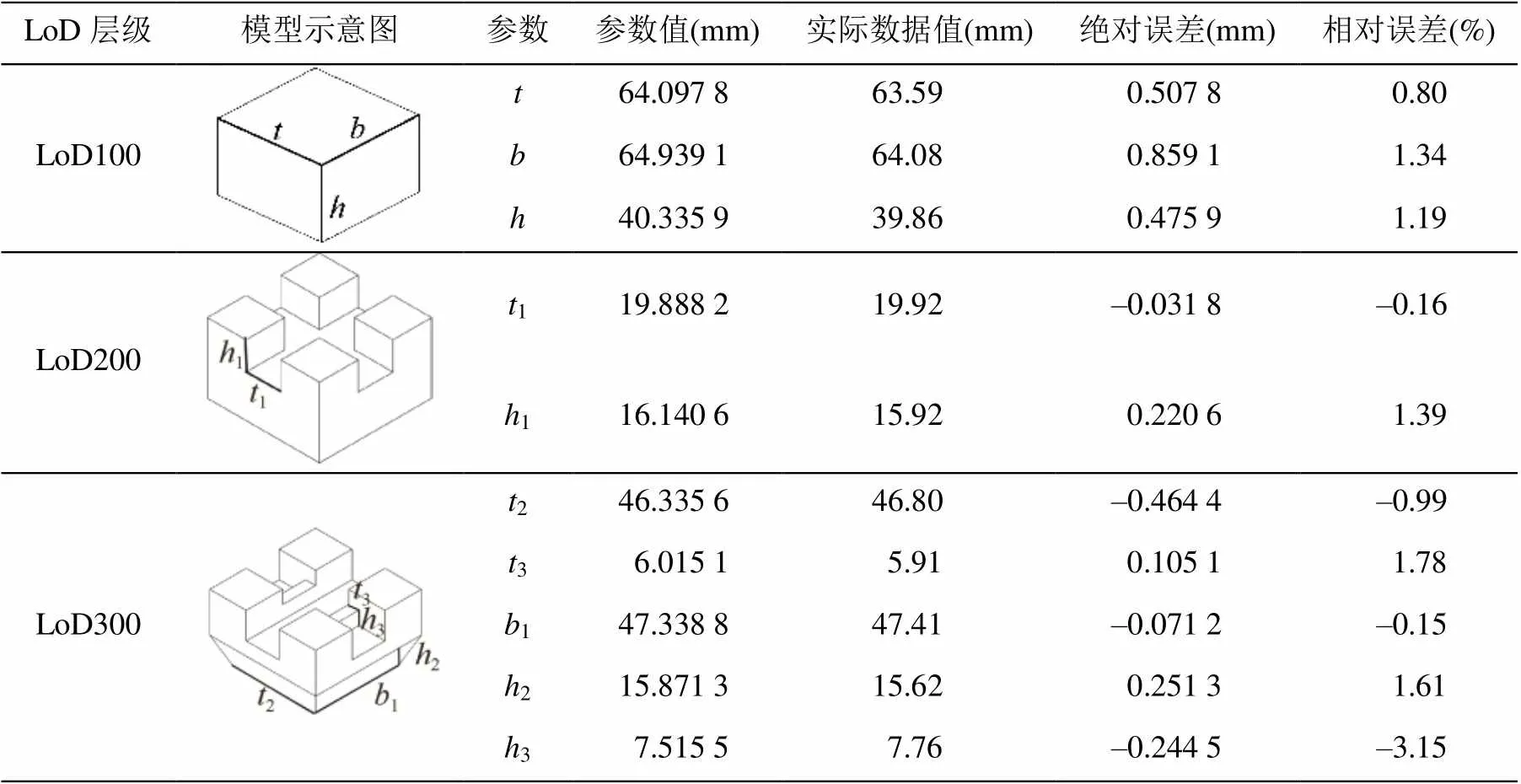
表2 试件1多LoD参数提取结果与误差统计结果
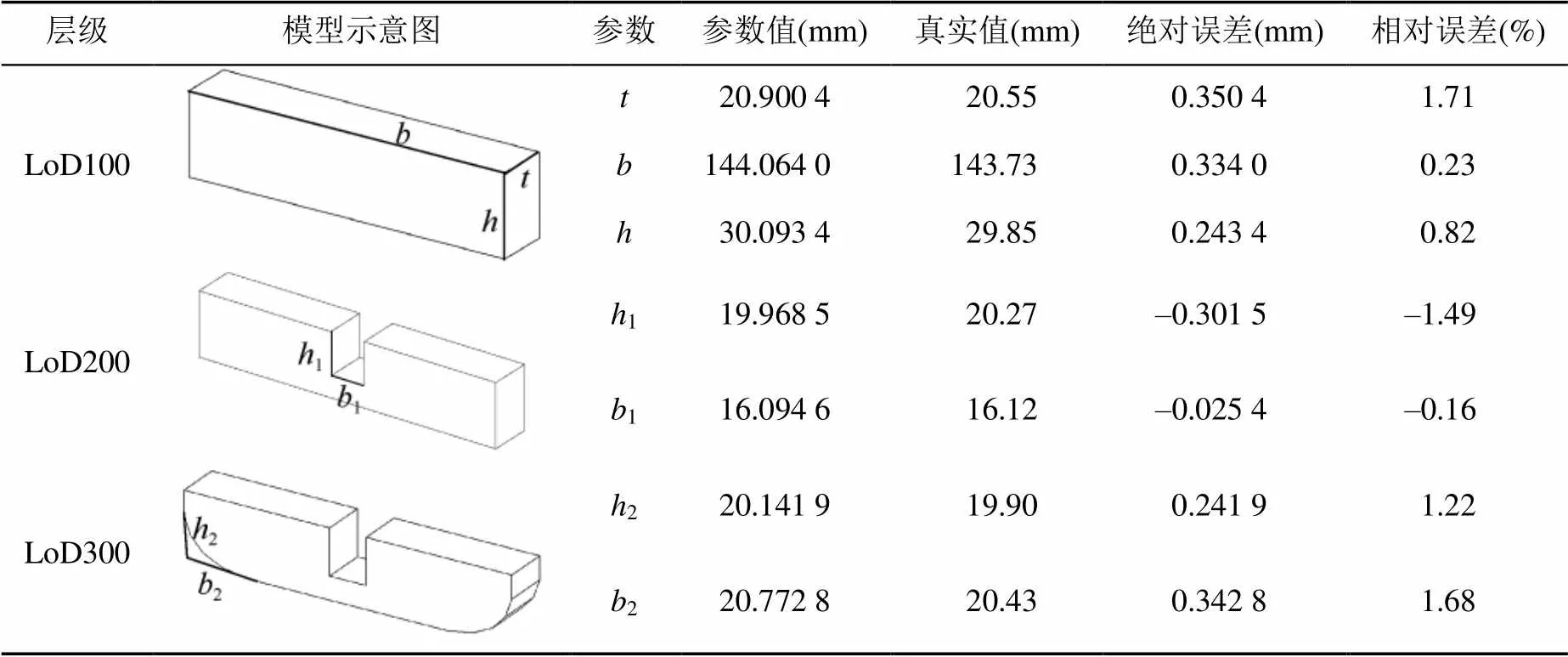
表3 试件2多LoD参数提取结果与误差统计结果

图8 三维偏差对比图
4 结 论
本文面向古木建筑遗产保护与发展的关键难点问题——高效、高精度获取关键构件的多LoD尺寸信息,提出了适用于关键构件的多LoD模型标准,及可表征多LoD尺寸信息的显著几何特征,提出了一套基于点云数据的关键构件多LoD尺寸信息自动化提取方法,对典型关键构件进行了信息提取,验证了该方法的高效性和可靠性。
在实际的古木建筑修缮工程中,存在落架维修的复原大修方式,即当木构架中主要承重构件残损,有待彻底整修或更换时,先将建筑构架全部或局部拆落,修复后再按原状安装的维修方法。本研究的成果可以应用于落架维修,实现各个构件的三维激光扫描和尺寸信息留取。但显然也存在无法落架大修的古木建筑,较难获取各构件的具体尺寸,需要进一步研究智能化对象拆解技术,基于古木建筑关键构件固定的尺寸比例和连接方式获取连接部位等不可见部位的尺寸信息,这也是未来的研究重点。
尽管本研究还存在有待完善的部分,但本文所建议的多层级表达标准理念、基于显著几何特征参数的表达理念以及点云数据的高效自动化提取方法均可为相关工作的深入开展提供参考。总之,本文的研究成果可为古木建筑遗产的历史数据数字化留取和安全性能评估与提升提供参考。
[1] 淳庆, 潘建伍, 董运宏. 南方地区古建筑木结构的整体性残损点指标研究[J]. 文物保护与考古科学, 2017, 29(6): 76-83.
[2] 张建丽. 应县木塔残损状态实录与分析[D]. 太原: 太原理工大学, 2007.
[3] 侯卫东,王林安,永昕群. 应县木塔保护研究[M]. 北京: 文物出版社, 2016: 46-54.
[4] 姜绍飞, 吴铭昊, 唐伟杰, 等. 古建筑木结构多尺度建模方法及抗震性能分析[J]. 建筑结构学报, 2016, 37(10): 44-53.
[5] PAULY M, MITRA N J, WALLNER J, et al. Discovering structural regularity in 3D geometry [J]. ACM Transactions on Graphics, 2008, 27(3): 1-11.
[6] 郝妮, 耿国华, 李姬俊男,等. 基于积分几何的文物表面规律性显著特征提取[J]. 系统仿真学报, 2013, 25(9):2060-2064.
[7] 张继贤, 林祥国, 梁欣廉. 点云信息提取研究进展和展望[J]. 测绘学报, 2017, 46(10):1460-1469.
[8] 詹庆明, 周新刚, 肖映辉,等. 从激光点云中提取古建筑线性和圆形特征的比较[J]. 武汉大学学报: 信息科学版, 2011(6): 674-677.
[9] 程效军, 贾东峰, 刘燕萍. 海量点云数据轮廓特征线的快速生成算法[J]. 同济大学学报: 自然科学版, 2012, 40(10): 1559-1563.
[10] 马骊溟, 徐毅, 李泽湘. 基于高斯曲率极值点的散乱点云数据特征点提取[J]. 系统仿真学报, 2008, 20(9): 2341-2344.
[11] DEMARSIN K, VANDERSTRAETEN D, VOLODINE T, et al. Detection of closed sharp edges in point clouds using normal estimation and graph theory [J]. Computer-Aided Design, 2007, 39(4): 276-283.
[12] CLARK J H. Hierarchical geometric models for visible-surface algorithms [J]. ACM SIGGRAPH Computer Graphics, 1976, 10(2): 267-267.
[13] 万程辉, 程效军, 贾东峰. 基于快速成型技术的点云压缩算法研究[J]. 测绘通报, 2012(6): 10-12.
[14] 丁承君, 孙刚, 尹李亮,等. 散乱点云的边界提取[J]. 计算机技术与发展, 2017, 27(7): 83-86.
[15] STEDER B, RUSU R B, KONOLIGE K, et al. Point feature extraction on 3D range scans taking into account object boundaries [C]//2011 IEEE International Conference on Robotics and Automation. New York: IEEE Press, 2011: 2601-2608.
[16] LV J G, YANG D H, WANG Q S. Fast 3-D feature point detector based on Harris [J]. Applied Mechanics and Materials, 2013, 325-326: 1567-1570.
[17] MUSSER D R. Introspective sorting and selection algorithms [J]. Software: Practice and Experience, 1997, 27(8): 983-993.
An Extraction Method of Multi-LoD Dimension Information for the Key Components of Ancient Wooden Architecture Based on Salient Geometric Features
SHI Li-wen1,2,3, XIE Lin-lin1,4, HOU Miao-le1,2,3, LI Ai-qun1,4, HU Yun-gang1,2,3, LIU Hao-yu1,2,3
(1. Beijing Advanced Innovation Center for Future Urban Design, Beijing 100044, China; 2. Beijing Key Laboratory for Architectural Heritage Fine Reconstruction & Health Monitoring, Beijing 100044, China;3. School of Geomatics and Urban Spatial Informatics, Beijing University of Civil Engineering and Architecture, Beijing 100044, China;4. School of Civil and Transportation Engineering, Beijing University of Civil Engineering and Architecture, Beijing 100044, China)
For the assessment and improvement of the safety performance as well as historical and cultural inheritance of ancient wooden architecture, the dimension information of various key components of such architecture acts as the important foundation. However, an extraction method for such dimension information with high efficiency and accuracy is rarely reported. It is well acknowledged that the three dimensional (3D) laser scanning technology has the potential to provide a scientific solution for this problem. However, the point cloud data obtained by 3D laser scanning technology is usually enormous, and the dimension information herein cannot be directly obtained from this data. According to the important characteristics of the key component (i.e. multi-level of details (multi-LoD)) in ancient wooden architecture, a preliminary framework of multi-LoD models is proposed for various types of key components in the ancient wooden architecture, and the correspondingly salient geometric feature parameters, which aim to represent the dimension information of key components, are also recommended according to different LoD. Based on these multi-LoD models and massive high-fidelity point cloud data, an automatic extraction method of multi-LoD dimension information for the key components in ancient wooden architecture is proposed. This method is considered to be capable of accurately and efficiently extracting the multi-LoD dimension information of key components. To validate the reliability and high efficiency of this method, multi-LoD dimension information of two typical key components are extracted using the proposed method. The results indicate that this method is capable of extracting dimension information from millions of point cloud data within 7 minutes. Furthermore, the relative and absolute errors of such information are less than 2% and 0.5 mm respectively,thusvalidatingthehighefficiencyandreliabilityoftheproposedmethod.
key components of ancient wooden architecture; LoD model; salient geometric features; point cloud data; automatic extraction method
TU 856
10.11996/JG.j.2095-302X.2019040651
A
2095-302X(2019)04-0651-08
2018-11-08;
定稿日期:2018-12-11
北京未来城市设计高精尖创新中心项目(UDC2016030200);北京市属高校高水平教师队伍建设支持计划项目(IDHT20170508);北京市属高校高水平教师队伍建设支持计划长城学者培养计划项目(CIT&TCD20180322)
石力文(1994–),女,河南济源人,硕士研究生。主要研究方向为文化遗产数字化保护。E-mail:sliver_1011@hotmail.com
解琳琳(1986–),男,江苏海安人,讲师,博士。主要研究方向为建筑遗产保护与发展。E-mail:xielinlin@bucea.edu.cn
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
中国教育信息化(2019年22期)2019-12-20 07:31:26
制造技术与机床(2017年11期)2017-12-18 06:46:39
宝藏(2017年5期)2017-07-18 11:54:21
材料科学与工程学报(2016年4期)2017-01-15 13:35:29
娃娃乐园·3-7岁综合智能(2016年1期)2016-10-25 09:32:48
文物保护与考古科学(2016年4期)2016-05-17 05:31:17
电测与仪表(2015年7期)2015-04-09 11:40:04
计算机工程与科学(2015年1期)2015-03-27 07:06:17