
特深水库近坝库岸变形快速应急检测技术
2019-09-04 09:02何高峰
上海电机学院学报 2019年4期
罗 旻, 何高峰
(1. 中国地质大学 机械与电子信息学院, 武汉 430074; 2. 上海交通大学 船舶海洋与建筑工程学院, 上海 200240)
自人类建设水库大坝用于防洪发电以来,库岸滑坡事故不断发生,导致了巨大的财产和生命损失。1963年10月9日22:39时,意大利瓦依昂水库南坡一块南北宽超过500 m、东西长约2 km、平均厚度约250 m的巨大山体忽然发生滑坡,事故导致1 900余人死亡,700余人受伤。长江三峡大坝建成后,沿岸多次发生边坡滑移和崩塌事故。
特高大坝及近坝库岸边坡在特高水头和水位变幅长期作用下,加上复杂地质条件,近坝库岸的稳定是大坝安全运营的保障。在发生地震、特大暴雨、爆炸、撞击、地质灾害等突发事件的情况下,库岸结构极有可能发生损伤或破坏,给安全运营带来极大威胁。突发事件发生前,对近坝库岸进行水下应急快速检测,确定近坝库岸水下地形、获取水下地层信息和边坡在水下损伤、损毁程度,能够为安全评估和维修加固提供基础数据,对水库的长期安全运营具有重要的理论意义和工程实用价值。
1 国内外研究现状和发展趋势
1.1 特深水库近坝库岸表面成像及水下结构检测
目前特深水库近坝库岸表面成像和三维建模的难点在于水下摄影困难,导致实质上无法得到完整的库岸整体鸟瞰图。目前成像多采用人工潜水的方法,针对特定部位进行定点摄影,因此,得到的影像成果多是局部的表面影像,很少有立体测图。
水下结构检测主要采用潜水探摸、录像和声呐地形扫测等方式。这些方法的缺点在于:
(1) 潜水探摸,工程潜水不超过60 m,一次水下检测时间仅有30 min,工作效率低,仅适用于小面积(30 m水深条件下100 m2)地域检测。可见该方法不适用于特高水坝库岸检测;
(2) 水下录像方法应用已相对成熟,浅水环境一般采用潜水员操作,深水环境采用遥控水下机器人(Remotely Operated Vehicle, ROV)携带,水面控制方式。但均用于颜色信息记录,无定位和测量功能,不能用于特高大坝库岸的大范围精确调查;
(3) 水下地形检测方法在工程上应用已比较成熟,将测深仪安装到测量船上,船沿固定测线巡航,测深仪将沿线区域的水深测量并记录下来,最终结合GPS定位数据建立整个区域的三维地形模型。这种方法适用于水深和地形起伏不大的环境,在特高大坝条件下,深度可达300 m以上,分辨率和精度低于0.9 m(3‰),而库岸边坡坡度陡,不适用该方法;
(4) 目前已有旁侧声呐技术或水下三维成像技术,但精度均不超过1 m,且操作流程极其复杂,不适用于快速检测需要;
(5) 深水ROV库岸检测应用场合比较多[1-2],市场上国内外相关产品也比较丰富,但仍集中于摄像检查领域,能够得到的信息十分有限,对于控制库岸结构稳定的岩体强度现状和内部缺陷信息无法获取;
(6) 携带地形成像的深水ROV也有应用,但是主要用于目标搜索和航行过程中的前方障碍物探测,不能用于库岸边坡高精度测量。
由此可见,目前已有方法和设备均无法满足高坝库岸灾后快速检测的环境、效率和成果质量要求。
1.2 特深水库近坝库岸地层信息
地震勘察是一种勘测地层信息的常用方法,通过观测地质剖面对地震波的响应,求解出响应特征中蕴藏着的丰富的地质信息。地震映像法主要应用弹性波的动力学特征对波场进行解释,没有繁杂的资料处理流程,是一种能适应各种工作环境、简便、快速的工程物探勘查手段。目前地震映像法解译过程中大部分情况下,只是利用了地震信息中绕(散)射波的特征形态及各种波的相位特征,只能进行定性的解释[3]。大多数工程采用综合物探的方式,例如综合电法或其他地震勘探方法实现定量解译[4-6],指出充分利用观测到的地震波场特征进行定量解译的研究较少[7],通过分析已知地质条件的地震波频谱的时间与空间分布的关系,研究综合利用频域和时域信息进行地震映像数据处理的效果情况,有利于提高地震映像数据的解译精度和准确性[8]。目前用于地震属性提取和分析中的数学工具主要考虑原始地震信息中地质结构、成因等客观存在的地质特征和规律(如地震地层学、层序地层学等理论)是不够的。
2 水下机器人基本类型及基本原理
水下机器人也称为无人水下潜水器(Unman-ned Underwater Vehicles, UUV),是一种可在水下移动、具有视觉和感知系统、通过遥控或自主操作方式、使用机械手及其他工具代替或辅助人去完成水下作业任务的装置。按照与水面控制系统联系方式的不同可以分为拖航式、自航式、能在海底结构物上爬行式和载人水下机器人4种。
有缆水下机器人(自航式水下机器人的一种),或者称为ROV。ROV需要从母船接受动力,不完全自主,同时,需要人为通过电缆对ROV进行遥控操作。海马号ROV是中国2014年研制成功的下潜深度4.5 km、国产化率最高的无人遥控潜水器系统。
无缆水下机器人(自航式水下机器人的一种),或称为自治水下机器人或智能水下机器人(Autonomous Underwater Vehicle, AUV),自身拥有动力能源和智能控制系统,能自行决策和控制,完成人们赋予的工作使命。该类设备优点是活动范围可以不受空间限制,并且没有脐带缆,不会发生脐带缆与水下结构物缠绕问题,但是水下的续航能力和负载能力受到自身能源的强烈制约,只能完成一些短程和轻载的工作,而自身的CPU处理能力又很大程度上限制了AUV所能从事工作的复杂程度。2012年我国首个自主研制的AUV“潜龙一号”,可以在水下6 km处以2节的巡航速度,连续工作24 h。
可爬行机器人(Crawler ROV)。美国Sea-Botix Inc公司LBC多功能水下可爬行机器人带1个吸盘和4个轮胎,安装在水下机器人底部,可以贴住水下任何坚硬平面(水电大坝、船闸表面)爬行,对水下结构(裂缝、脱落、损坏等)进行仔细的检查。
载人水下机器人(Human Occupied Vehicle, HOV)。“蛟龙号”是中国2016年第1台自行设计、自主集成研制的载人深海潜水器可下潜7 062 m。
3 水下勘探技术的不足及其解决方案
水下勘探技术包括:侧扫声呐(Side Scan Sonar)[9]、浅层剖面仪(Sub-bottom Profiler)[10-11]、多波束测深系统(Multibeam Bathymetry System)[12]、地震映像法(Seismic Imaging Method)[13],每个技术各有侧重[14]。
3.1 不足之处
目前,水下机器人定位系统和检测系统主要有侧扫声呐、浅层剖面仪和多波束探测系统,用于实现水下地形和地质调查[15]。在水下勘探方面还存在:① 集中于深水ROV坝体摄像检查能够得到的信息十分有限;② 不利于在水质浑浊的水体中检测目标的细部详细情况,如裂缝、破损等;③ 控制库岸结构稳定的地层信息、岩体强度现状和内部缺陷数据较难获取。
3.2 解决方案
针对以上不足,解决方案为:① 选用开放式构架,便于搭载传感器及实验装置。摄像头和照明设备同时转动,保证摄像头旋转角度内无照明死角。② 利用ROV搭载地震映像法、面波仪、超声波等设备,并使用遥控机械手可将传感器运载到贴近水底位置进行工作。③ 综合利用ROV搭载多波束声呐系统,侧扫声呐、浅层剖面仪、地震映像法勘察设备,并使用遥控机械手可将传感器运载到贴近水底位置进行工作。
4 主要研究开发内容
结合成熟的深水ROV技术设备,进行针对性改造,从3个层面上进行近坝库岸地形地貌、地层信息和边坡破坏情况的应急快速检测研究。
4.1 高精度惯性导航方法
检测系统的水下精确导航与定位,采用高精度惯性导航方法。惯性导航方法用于水下ROV检测系统的定位,具有快速高效的优点,在该项目中需要进行两方面内容的研究。
(1) 研究并制定一套满足近坝边坡应急快速检测的标准化校准和水下测量流程,包括初始定位、测量过程误差分析、中间过程的动态校验方法、设备和标准化实施流程。
(2) 满足上述应用场合的最优化算法研究和开发,目前的惯性导航定位算法采用二次积分的方法,在快速应急检测中直接使用存在滞后、失真、突变、误差过大的问题,需结合操作开发滤波、定位、校准算法,保证结果的准确性。
4.2 表面成像与三维建模
携带相机和地形成像设备贴近库岸区域,进行表面成像和三维建模。表面影像和精细地形特征是边坡稳定性判断的最直观信息,对应急检测研判的准确性有十分重要的作用,该项目中需要进行3方面内容的研究突破。
(1) 参考现有水下观测型ROV操作规程,并根据本项目环境和检测要求,研究并制定一套满足近坝边坡应急快速摄像和地形检测的标准或规程。
(2) 研究基于刺点、边缘特征线信息的图像与地形匹配分析方法,保证研究区域两种关键信息获取与研判的同步性。
(3) 近距离获取高精度地形信息与三维模型构建方法研究,以及运用微分算法提取影响边坡稳定的缺陷特征方法与算法研究。
4.3 勘查和成像
携带地震映像勘察设备对库岸内部结构进行勘查和成像。地震映像法以水为耦合介质,采用声波反射方法进行边坡地质结构探查,对于探明岩体内部结构和影响边坡稳定的内部缺陷有重要作用,该项目中需要进行3方面内容的研究。
(1) 参考现有海上地震勘探的作业规程,考虑近坝边坡地形、周边环境的特殊性,制定一套相应的检测标准或作业规程。
(2) 根据波动方程和本项目的特殊边界条件建立分析模型,推导得出适用于该检测环境的测线与设备参数选择、优化依据,并研究内部结构的反演方法。
(3) 利用表面影像、地形与内部结构数据建立现状三维模型的方法与流程研究,为后续边坡稳定性分析提供依据。
5 实施方案、技术路线
首先利用已有部分科研成果ROV,针对特深水库近坝库岸变形快速应急检测特点,对水下精确导航与定位展开研究。
对水下地形地貌、水下地层信息和水下边坡变形破坏情况监测方法、设备展开室内试验研究。研制出1台“深水库近坝库岸变形快速应急检测机器人”。
ROV与水下勘探仪器的整合工作,实现集水下勘探、无损检测技术和水下机器人技术的一体化无缝搭接,并应用于实际工程中。选择锦屏一级水电站近坝库岸作为中试基地,将“深水库近坝库岸变形快速应急检测机器人”用于实际工程,检验、调试、完善设备性能。
课题可以分解为:① ROV搭载部分(含水下照明、摄像系统基本配置);② 水下地形测试系统(声呐、激光、多波速);③ 水下地层测试系统(浅层剖面仪、面波仪、地震映像法)。
技术路线如图1所示。
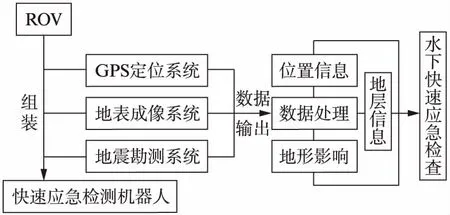
图1 技术路线图
深水库近坝库岸变形快速应急检测机器人,搭载了水上常用勘测仪器设备,如定位系统、地表成像系统和勘测系统等,并进行了针对性改造和完善,适用于较复杂的水下环境,不仅可以实现近坝库岸进行水下应急快速检测,确定近坝库岸水下地形、获取水下地层信息和边坡在水下损伤、损毁程度及相应防治或监测工程措施现状,也能够为安全评估和维修加固提供第一手基础数据,并快速形成相应建议措施,防止突发事件造成的进一步灾害。
6 实施结果
主要利用前期改造好的ROV及其相关测试设备、测试方法和软件进行工程应用测试,开展了位于雅砻江锦屏水电站坝址上游11.5 km的呷爬滑坡的现场勘测、数据采集、数据分析与处理等工作。
6.1 工程概况
呷爬滑坡位于四川省凉山州锦屏一级水电站坝址上游11.5 km,前缘高程1 655 m,与枯期河水位持平,后缘高程2 120 m,滑坡纵长约880 m,宽约260~300 m,滑体平均厚度约60 m,体积约1 300万m3。滑体物质主要为块碎石土,滑带厚1~8 m,主要由灰黑色泥夹碎石组成。该近坝库岸滑坡整体情况如图2所示。
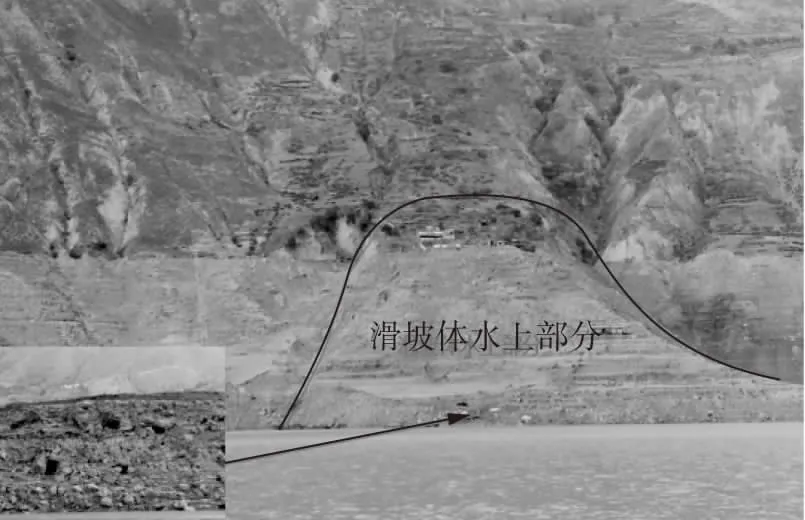
图2 呷爬滑坡水上部分图
6.2 检测结果
深水库近坝库岸变形快速应急检测机器人通过携带RESON7125多波束测深仪、Trimble-356GPS接收机3、CTD(SBE37)、水下激光扫描仪、侧扫声呐等,获取现场滑坡水下点云数据,并经过数据处理获取边坡水下数字地表模型及地层信息,如图3、图4所示。
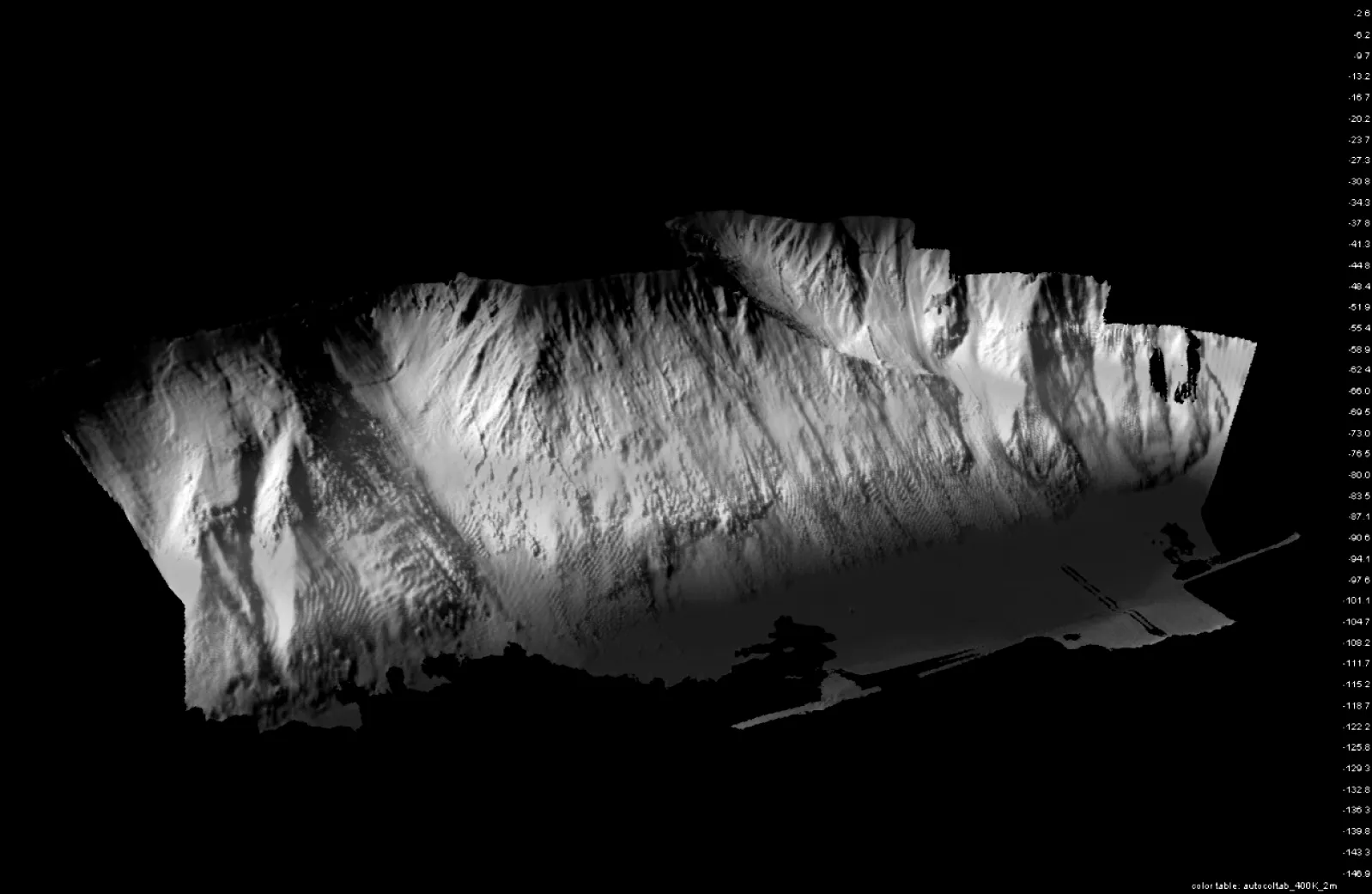
图3 呷爬滑坡体水下部分数字模型
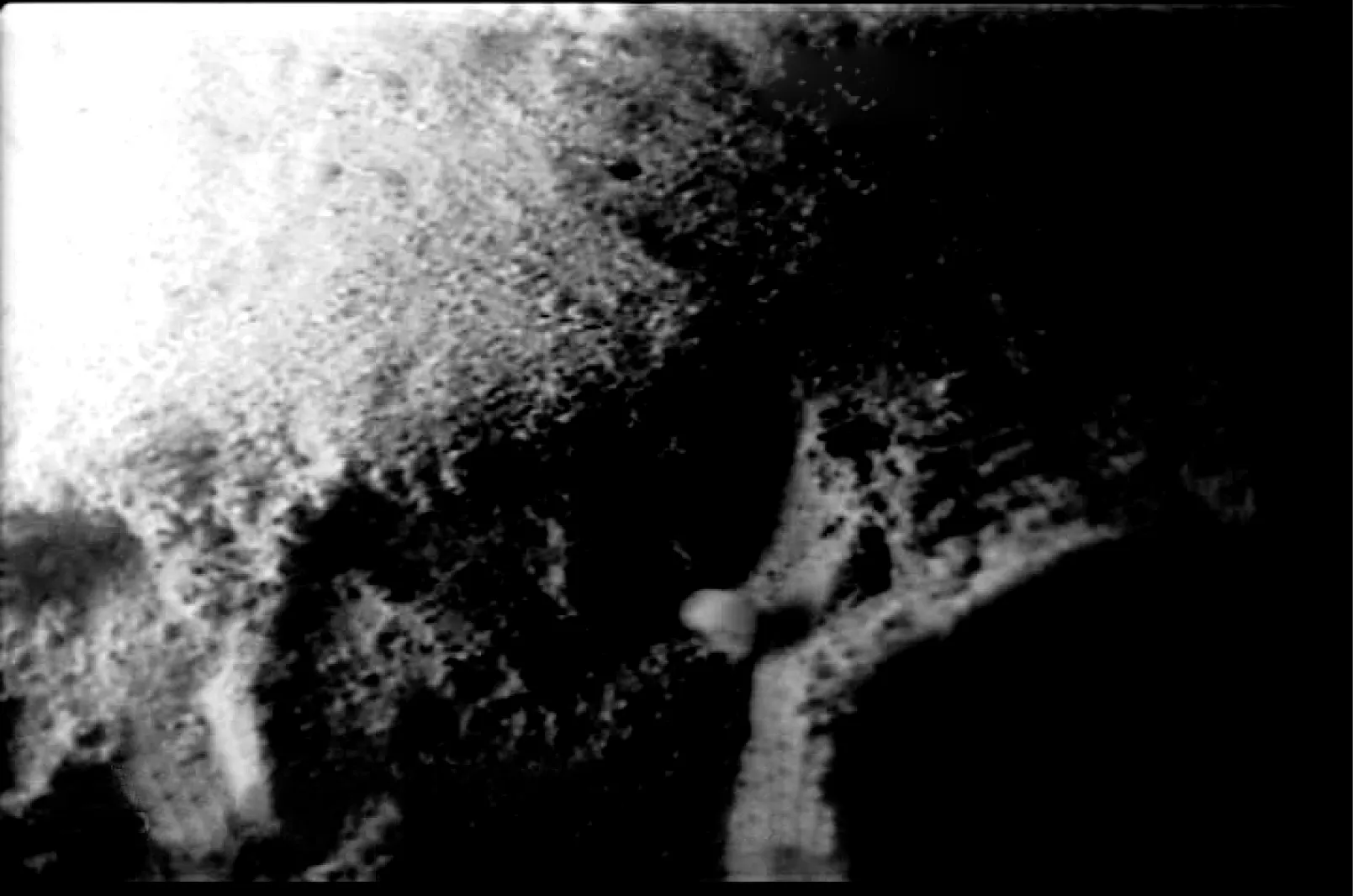
图4 呷爬滑坡水下影像
7 结 语
深水库近坝库岸变形快速应急检测机器人利用多波束系统获取了水下滑坡的位置、大小等点云分析数据,对呷爬滑坡水下地形地貌进行了展示;最后利用ROV携带摄像机对呷爬滑坡前缘变形区域进行了勘测与拍照。研究得到的相关成果可用于现场滑坡体应急抢险的前期勘察、水库边坡的长期监控以及水利水电工程中的常规测绘及地质调查,具有快速、高效、高精度、低成本等特点,在水利水电工程中具有广泛的应用前景。然而这是以水下勘测为主,后期也需要结合三维激光扫描、无人机航测获取滑坡区域水上地形三维空间信息,对其进行纠正与填充处理,并实现水上水下多源数据融合之后精度较高的地形数据,构建逼真的近坝库岸现场三维模型。
猜你喜欢
建材发展导向(2022年4期)2022-03-16
有色金属(矿山部分)(2021年4期)2021-08-30
河北地质(2021年1期)2021-07-21
科学与财富(2021年36期)2021-05-10
黑龙江水利科技(2020年8期)2021-01-21
水电站设计(2020年4期)2020-07-16
治淮(2020年6期)2020-07-07
水利建设与管理(2020年4期)2020-05-11
治淮(2018年3期)2018-03-21
中国公路(2017年18期)2018-01-23
