15米翼展太阳能飞机机翼颤振分析和刚度设计
2019-08-30 09:29毛一青杨飞谷迎松
航空工程进展 2019年4期
毛一青,杨飞,谷迎松
(1.上海奥科赛通用航空有限公司 设计部,上海 201210)(2.上海飞机设计研究院 试飞运营支持部,上海 201210)(3.西北工业大学 航空学院,西安 710072)
0 引 言
随着军事侦察、监测和通信中继等任务的需求增加,高空长航时太阳能无人机作为研究热点逐渐兴起[1-2]。太阳能飞机的展弦比很大,一般超过15,机翼结构面密度较小,小于3 kg/m2,并且气动静载荷引起的机翼变形较大,可达到半展长的25%[3-5]。相比于传统刚度较大的机翼,这类飞机的重量轻、刚度小、变形大、普遍存在颤振、突风响应等气动弹性问题。无人机不开展全模的颤振试验,通常按照航模的设计方法,设计完成后直接进入飞行试验,将会导致飞行颤振,造成飞行事故。上海奥科赛飞机公司设计的15米翼展太阳能飞机2号机,2017年7月28日飞行中,飞行高度670 ft(204.2 m)、飞行速度92 km/h(25.5 m/s)发生了颤振,导致飞机坠毁,如图1所示。因此,在设计阶段,对太阳能飞机进行合理的动力学建模和颤振分析,具有重要的工程意义。

图1 太阳能飞机飞行试验中的机翼反对称颤振Fig.1 Solar airplane anti-systemic wing flutter in flight test
国外对太阳能高空长航时无人机开展了大量研究[6-8],主要是考虑大变形的变参颤振计算,对柔性太阳能无人机的建模研究较少。无人机设计中,无人机颤振计算的困难是设计阶段缺少准确的刚度数据、重量数据,难以建立准确的动力学模型。在太阳能飞机的动力学建模方面,有限元法得到了广泛的应用[9-12],研究人员多采用梁单元和壳单元进行建模。在建模过程中,太阳能飞机的刚度设计尤为重要。朱鲜飞等[9]综合考虑扭转角、上倾角和后掠角影响,提出了一种适用于大展弦比复杂机翼刚度计算的方法。曹岩等[12]以最大载荷工况下的飞机强度为约束条件,调节结构刚度,实现了动力学反向建模。在太阳能飞机的颤振分析方面,季辰等[13]采用p-k法计算了某型太阳能无人机的颤振速度和颤振频率。谢长川等[14]考虑了弹性变形对结构刚度的影响,通过V-g法和p-k法计算了大展弦比柔性机翼在静变形位置附近的线性颤振特性。王伟等[15-16]推导了太阳能飞机机翼结构变形后的切线刚度矩阵和质量矩阵,引入准模态假设,采用p-k法研究了太阳能飞机的气动弹性稳定性。上述太阳能飞机的动力学建模和颤振分析中,大多根据确定性的结构参数进行正向建模和分析,但实际上在太阳能飞机的设计阶段,缺少准确的刚度数据、重量数据,因此难以直接进行建模和分析。曹岩等[10]进行的太阳能飞机动力学反向建模是以飞机强度为约束条件的,以颤振速度为约束条件的太阳能飞机动力学反向建模还没有进行相关的研究。
以上方法不能解决15米翼展太阳能飞机的颤振分析动力学建模难题,本文提出以目标颤振速度为约束条件,根据均布质量和几何尺寸,开展结构动力学反向建模方法研究。并进行结构动力学分析和颤振分析,最后提出太阳能飞机防颤振设计的工程建议。
1 机翼的动力学反向建模方法
1.1 动力学反向建模方法
太阳能飞机通过飞机机翼和平尾表面铺设的太阳能晶硅面板提供能源。在飞机动力约束的情况下,飞机重量受到限制,而要求的机翼面积又比较大,从而导致飞机的机翼刚度较小,在飞行中受气动力静载荷的影响产生大变形;大变形会降低机翼的模态频率,从而降低机翼的颤振速度。太阳能飞机的小刚度和大变形特点导致了太阳能飞机普遍存在颤振问题。按照常规航模设计的10米到15米翼展的太阳能飞机,颤振速度通常在20~28 m/s范围内,颤振速度较低。
在动力学建模方面,太阳能飞机通常没有准确的刚度参数、重量参数,缺乏正向动力建模数据。这个问题是太阳飞机和改装类飞机颤振模型的一个技术难点。本文提出一种基于大展弦比长直机翼的目标颤振速度,根据太阳能飞机的实际颤振速度、几何尺寸、称重重量数据,调节飞机的机翼刚度特性,进行动力学反向建模的方法。动力学反向建模方法如图2所示。动力学反向建模方法也称为长航时太阳能无人机颤振约束刚度设计方法,通过该方法可以获得目标刚度和目标颤振模型。
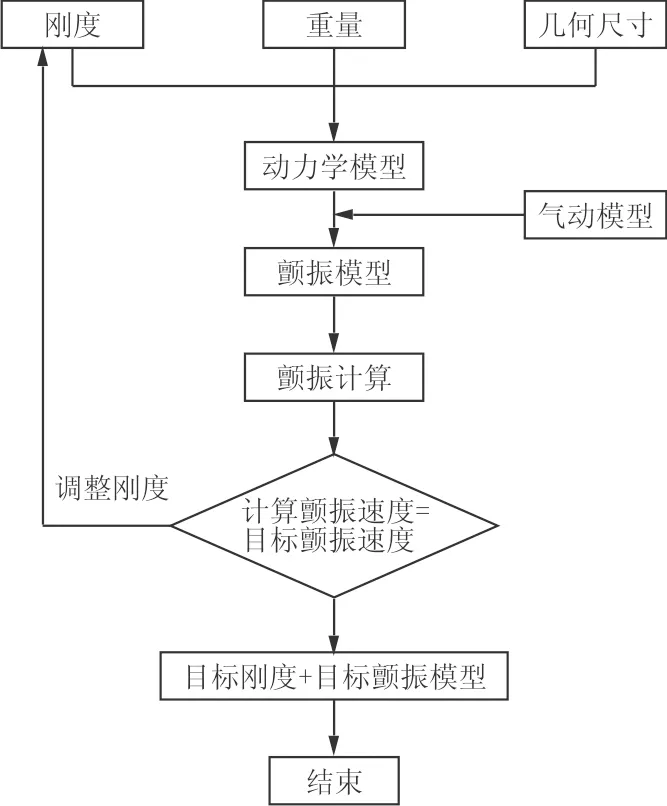
图2 动力学反向建模方法Fig.2 Dynamic model reverse build method
1.2 机翼结构动力学反向建模
本文的研究对象为上海奥科赛飞机有限公司先后研制的太阳能飞机3号机。这架飞机为长直机翼,采用太阳能电池和蓄电池供电,装备电传飞控。全机最大起飞质量70 kg,展弦比17.9,几何平均弦长0.84 m,机翼质量为25 kg,翼展15 m,面积12.56 m2,单位面积机翼平均质量为1.99 kg/m2。
太阳能飞机3号机的设计最大飞行速度为70 km/h,即19.5 m/s。根据飞机几何尺寸建立气动力模型,刚轴位置为机翼主梁。太阳能飞机机翼左右对称,可建立半模进行动力学分析。机翼刚度用梁单元模拟,质量用集中质量单元进行模拟。建立的梁架式结构动力学有限元计算模型如图3所示,颤振计算模型如图4所示。
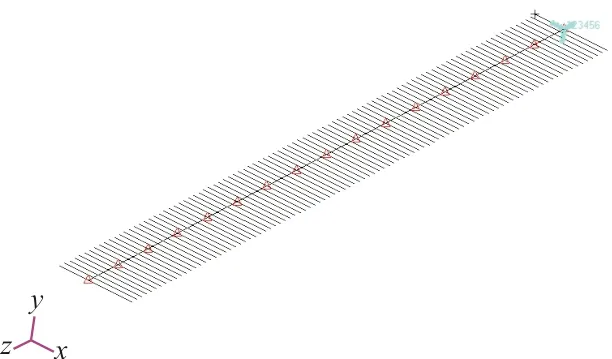
图3 结构动力学模型Fig.3 Structural dynamic model
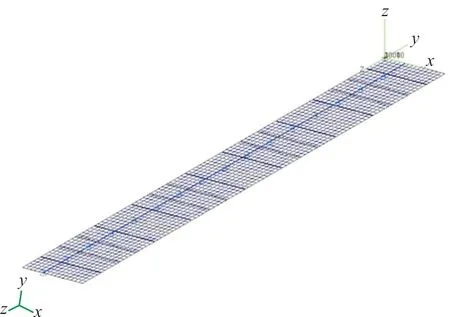
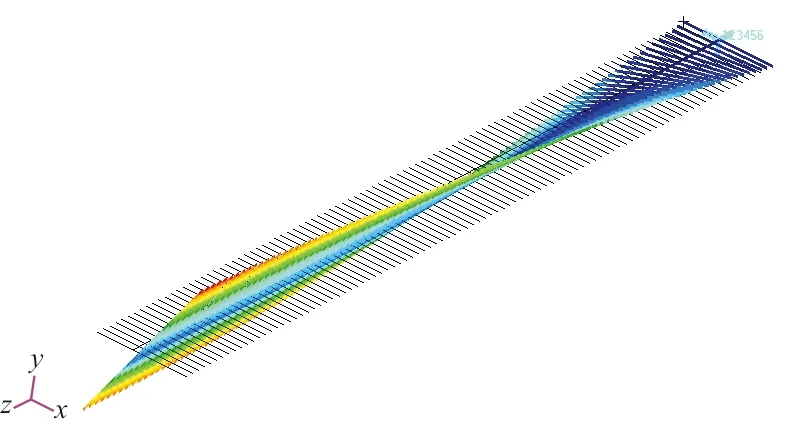
图4 颤振模型Fig.4 Flutter model
1.3 分析方法
计算模型的固有振动特性分析采用国际通用的大型结构分析程序MSC/NASTRAN SOL 103求解器、修正GIVENS法完成,计算模型的颤振特性分析采用MSC/NASTRAN SOL 145求解器、p-k法完成。全机分析总共包括21阶弹性模态。为保守考虑,颤振分析中不考虑结构阻尼,计算马赫数(Ma)为0.05,高度为海平面,大气密度为1.225 kg/m3。
2 固有振动特性分析和颤振分析
2.1 固有振动特性分析
满足目标颤振速度19.5和25.5 m/s的机翼动力学固有振动特性,模态振型和频率如表1所示。机翼垂直一阶弯曲模态频率0.69 Hz,机翼垂直二阶弯曲模态频率与机翼一阶扭转频率比较接近,分别为4.26和7.30 Hz。这三支机翼关键模态对应的模态振型如图5所示。
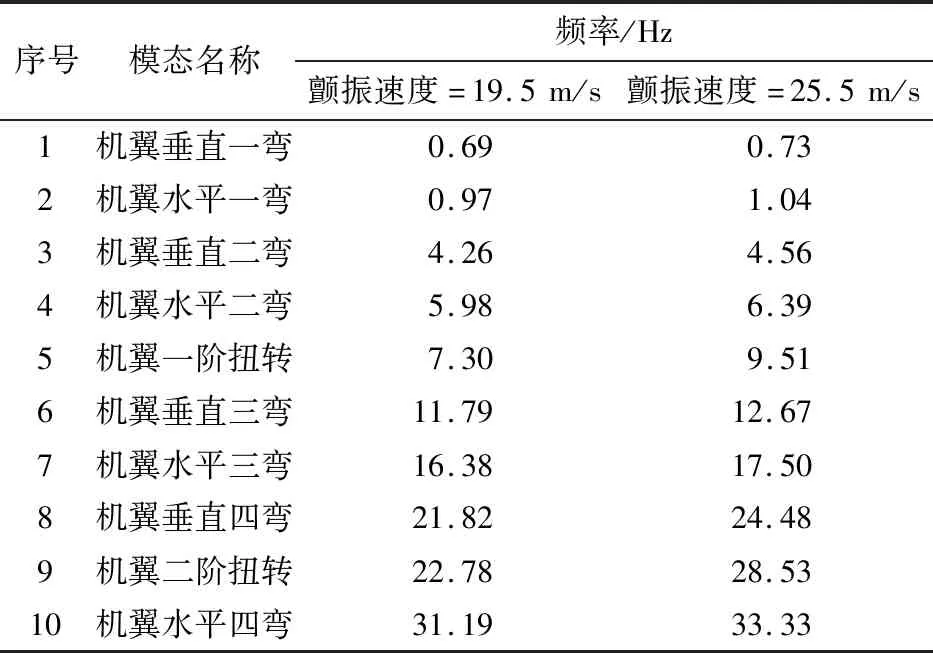
表1 机翼固有振动特性Table 1 Wing mode frequency
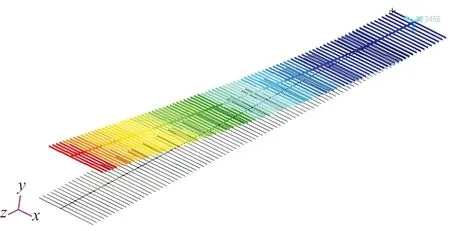
(a)机翼垂直一弯模态
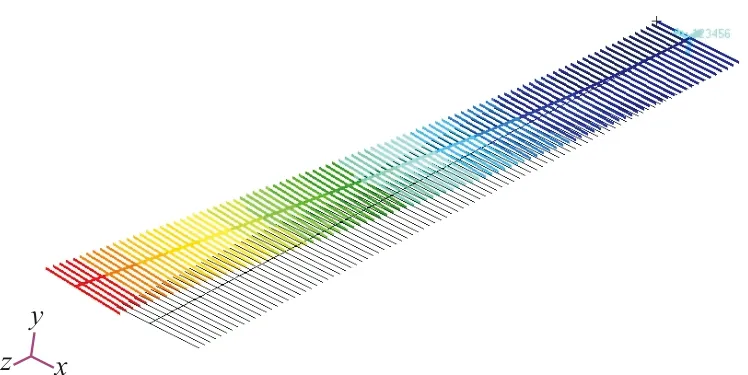
(b)机翼水平一弯模态
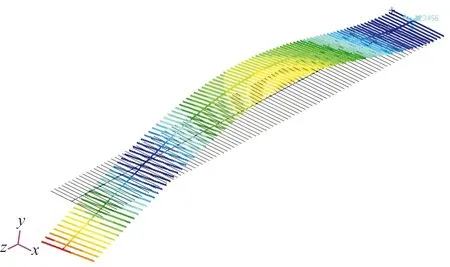
(c)机翼垂直二弯模态
(d)机翼一阶扭转模态图5 机翼固有模态Fig.5 Wing natural mode
2.2 颤振特性分析
计算得到机翼的颤振速度和颤振频率如表2所示,所得V-g曲线和V-f曲线分别如图6~图7所示(H=0 m,Ma=0.05)。
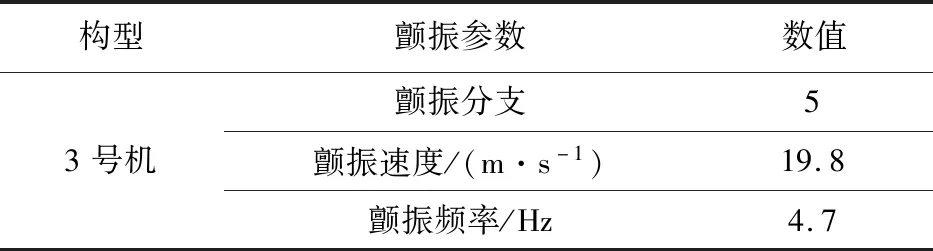
表2 机翼颤振计算结果Table 2 Wing flutter result
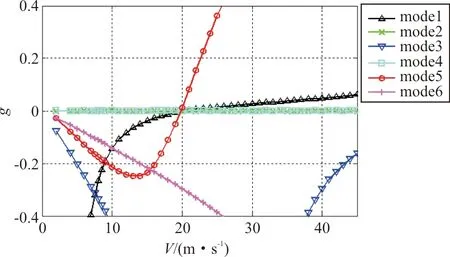
图6 机翼颤振的V-g图Fig.6 Wing flutter V-g curve
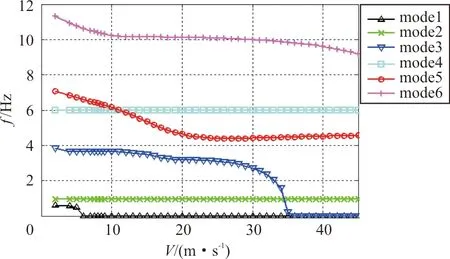
图7 机翼颤振的V-f图Fig.7 Wing flutter V-f curve
从图6可以看出:穿越分支为第5支机翼一阶扭转模态。从图7可以看出:机翼一阶扭转模态频率降低,与机翼二阶弯曲模态频率靠近,两个模态耦合导致机翼颤振。
分析结果表明:机翼颤振主要是机翼垂直二阶弯曲和机翼一阶扭转模态耦合,表现为爆发型颤振。颤振速度19.8 m/s(71.28 km/h),颤振频率4.7 Hz,满足实际颤振速度19.5 m/s的目标。
2.3 变刚度颤振特性分析
在上述刚度基础上,进行变参分析,变刚度对应的颤振速度如表3所示,可以看出:机翼扭转刚度增大70%,颤振速度增大29%。
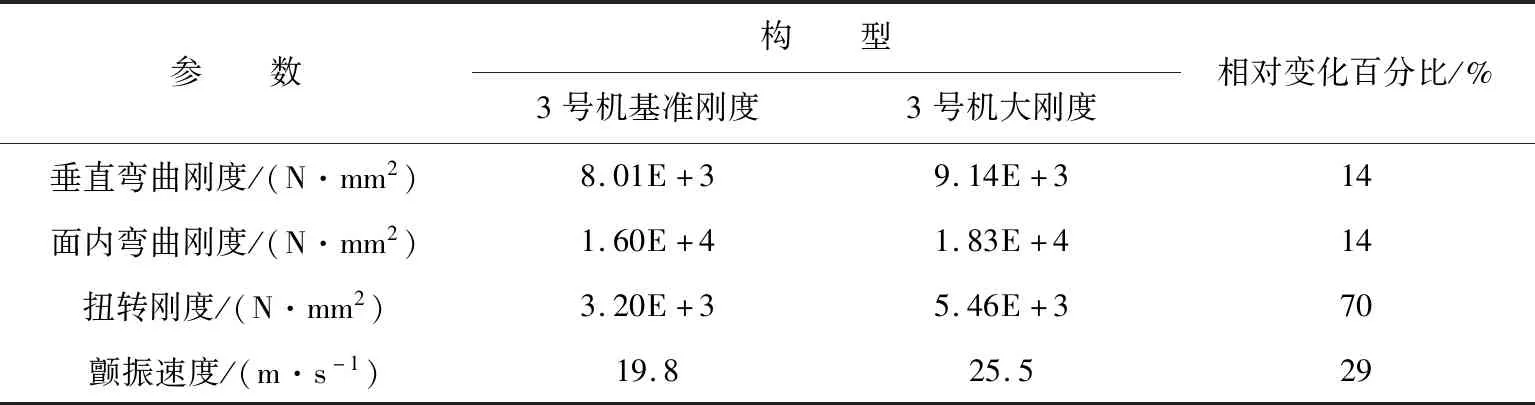
表3 机翼刚度计算结果Table 3 Parametric flutter study with respect to varied wing stiffness
3 工程建议
太阳能飞机的颤振设计存在以下问题:
(1)由于太阳能飞机的机翼翼展很大,太阳能飞机的刚度数据难以准确分析,因此难以建立准确的颤振计算模型。
(2)目前,低速风洞试验最大口径为5 m,大型太阳能飞机无法直接在风洞中进行颤振试验。
(3)试飞中飞行速度难以控制,一旦达到颤振速度,飞机就会发生颤振,导致飞机损伤,引起飞行事故。
基于以上问题,本文认为,通过以下两方面措施,可以解决太阳能飞机的颤振问题:
(1)在设计阶段,就要考虑颤振约束,进行初步的颤振分析,并开展地面模态试验,进行模型修正;
(2)未来可考虑采用地面车载颤振模型试验技术,可以进行太阳能飞机全模的地面车载颤振试验[17]。试飞前,在地面获得太阳能飞机的颤振速度和颤振频率,保证试飞安全。
4 结 论
(1)本文提出的颤振速度约束的动力学反向建模方法能够适用于建立太阳能飞机的动力学模型和颤振模型,获得机翼的目标刚度。
(2)增大扭转刚度,可显著提高太阳能飞机的颤振速度。
(3)太阳能飞机在设计阶段,需要考虑颤振约束,进行初步的颤振分析,或者采用地面车载颤振模型试验技术,获得颤振速度和颤振频率。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
汽车实用技术(2022年10期)2022-06-09
昆明医科大学学报(2022年3期)2022-04-19
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2020年10期)2020-11-14
科普童话·百科探秘(2019年5期)2019-08-27
成长·读写月刊(2018年8期)2018-08-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18