
智能材料驱动的高速开关阀
2019-08-29 02:34朱玉川
压电与声光 2019年4期
罗 樟,朱玉川
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
高速开关阀作为一种数字阀,因其具有抗污染,重复性好,非线性现象对数字阀控制系统影响小等特点,而被广泛应用于汽车与航空发动机燃油喷射,汽车与飞机刹车等领域,通常由脉宽调制(PWM)数字信号驱动,通过调节PWM信号占空比输出离散化流量[1]。目前,市场上的高速开关阀多采用电磁铁作为其电-机转换器,其工作频率通常低于50 Hz。与电磁式高速开关阀相比,将智能材料应用在高速开关阀上,可以提高其频响与流量输出精度,如文献[2-3]中的电-机转换器分别利用压电叠堆和超磁致伸缩材料驱动,其工作频宽大于400 Hz,响应时间小于1 ms。
应用于高速开关阀驱动的智能材料主要包括磁致伸缩材料、压电叠堆、磁流变液及形状记忆合金等,这些材料在外界的激励下其形状或状态会发生快速改变,利用智能材料的这种特性可以将其作为高速开关阀的电-机转换器。
1 智能材料及其电-机转换器
压电材料在施加一定的电压时会发生形变。可以利用压电材料作为液压控制阀的电-机转换器,图 1为郭亚子等设计的基于压电叠堆的电-机转换器原理图,其结构简单,响应速度小于0.5 ms,频宽大于600 Hz[2]。但压电叠堆在高频方波工作状态下,其电极和叠堆间的粘接层易脱落,将导致压电叠堆击穿损坏。
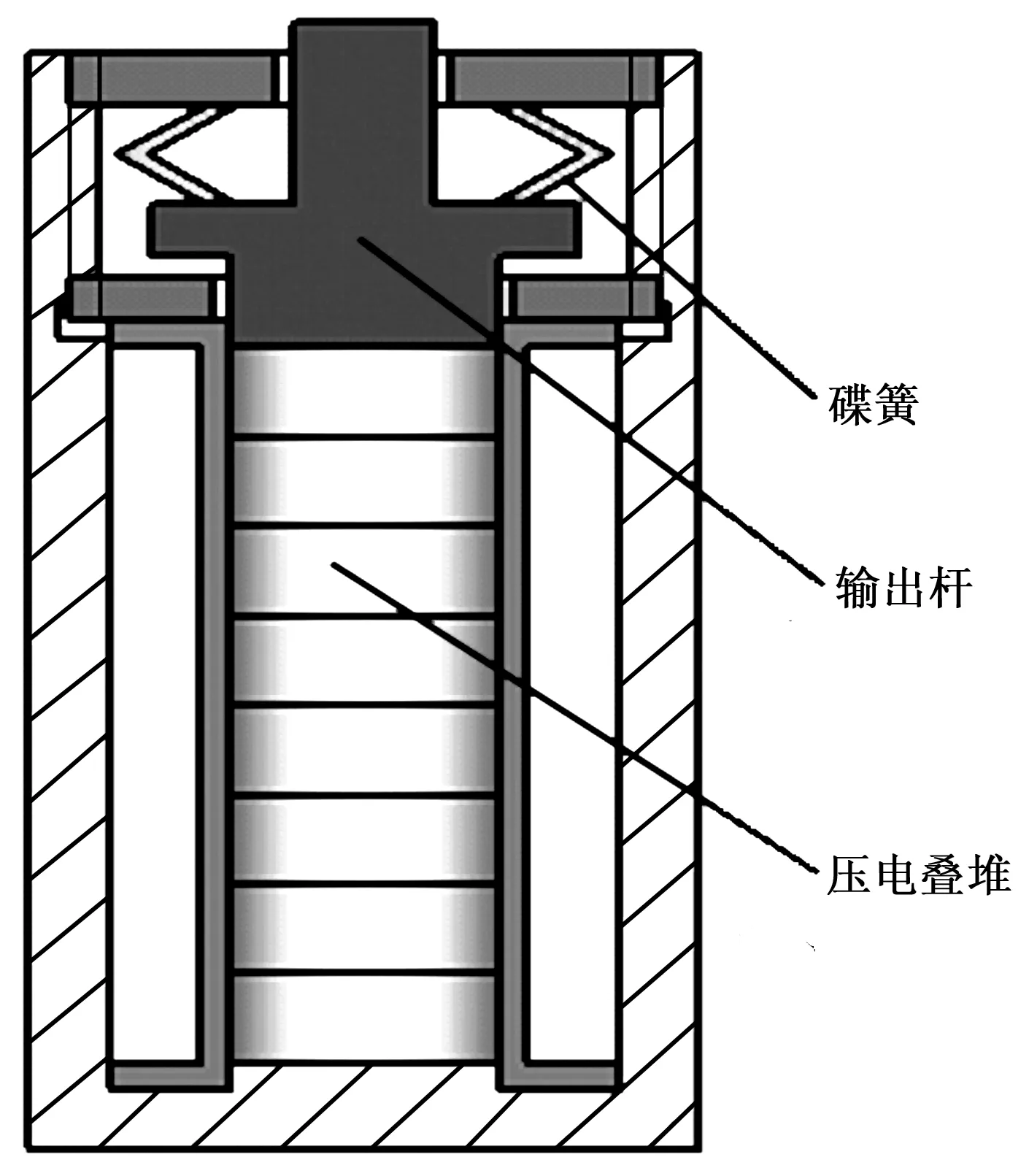
图1 压电电-机转换器
磁致伸缩材料在磁场作用下会发生一定形变,不施加磁场时磁致伸缩材料恢复原形,具有响应快,输出力大及能量传输功率密度高等优点。图2为杨旭磊等设计的基于超磁致伸缩材料的电-机转换器,其响应时间小于1 ms,在实验中其频宽大于400 Hz[3]。与压电叠堆相比磁致伸缩材料需使用线圈,体积较大,易发热。

图2 磁致伸缩电-机转换器
形状记忆合金分为温控形状记忆合金和磁控形状记忆合金,温控形状记忆合金在一定的温度下发生相变,可以为液压控制阀提供一定的驱动力。但是温度控制难度相对较大,且响应时间过大[4]。
磁控形状记忆合金通过磁场来控制孪晶变异体的重新调整定向,而使磁控形状记忆合金宏观上发生形变[5]。与温控形状记忆合金相比其响应速度快,与压电和磁致伸缩材料相比其应变大,且兼备了大应变和响应速度较快的优点。但其形变不能自动恢复需施加外力,且居里温度相对较低[6]。图3为Adapta Mat公司的一款磁控形状记忆合金作动器,其输出位移为5 mm,工作频率为300 Hz,但输出力只有5 N。
图3 磁控形状记忆合金作动器
磁流变液在外加磁场的作用下,可以从牛顿流体转变为粘性流体,撤去磁场后可以恢复为牛顿流体[7-8]。磁流变液高速开关阀结构较简单,但系统工作介质需替换为磁流变液,目前的磁流变液可控流量较小,且稳定性差限制了其应用[9]。
由于智能材料本身的特性(如磁致伸缩材料和压电材料),其阀芯位移小,导致高速开关阀可控流量较小,可利用放大装置放大其输出位移。
微位移放大装置按放大方式可分为柔性铰链放大式、压曲放大式和液压放大式[10]。柔性铰链放大根据原理的不同又可分为杠杆放大、三角放大和平行四边形放大(见图4)。它具有无机械摩擦,动作灵敏度高等优点[11],但通常要达到相应的放大倍数都要做成多级放大,其具有结构复杂,易疲劳损坏及带载能力差等缺点[12]。

图4 柔性铰链放大
压曲放大机构利用薄板或薄壳体受压或受拉变形原理,薄板的初始曲率越小其放大倍数越高。智能材料有两种布置方式。布置在中间时如图 5所示,当智能材料伸长或缩短时压曲放大机构的输出形式分别为收缩和扩张;智能材料布置在两侧时(见图6),压曲放大机构输出形式与布置在中间时相反[10]。压曲放大机构具有结构简单,加工精度要求不高的特点。但该放大机构产生的反力较大,输出力偏小。
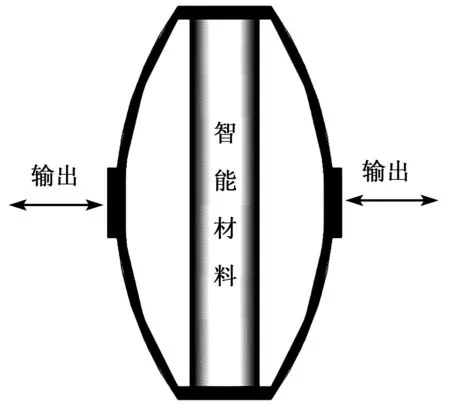
图5 中间布置式
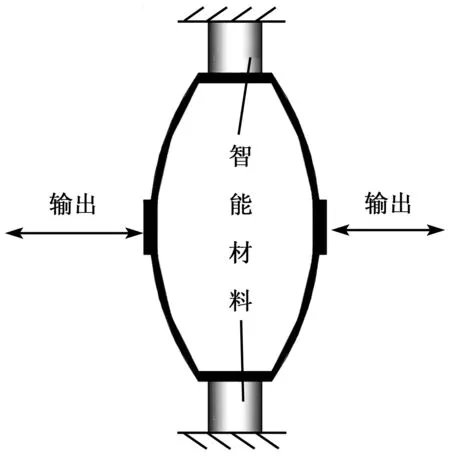
图6 两侧布置式
液压放大机构是一个密闭的容腔(见图7),里面充有液体,驱动装置推动液压放大装置的大活塞动作,挤压液压放大装置容腔内液体,在容腔内产生一定的压力,从而推动液压放大装置中的小活塞动作,由于两活塞面积不同,工作时小活塞的位移大于大活塞的位移,在不考虑腔内液体体积压缩量时,大、小活塞的位移之比与其面积之比成反比;液压放大机构具有结构简单,承载能力高,放大倍数为直径之比的平方,可在一定的体积内达到更大的放大倍数[13-14]。但是液压放大装置存在泄漏、动态性能较差等问题。

图7 液压放大原理图
2 高速开关阀基本原理
高速开关阀的控制信号为数字信号,它的输出流量为离散流量[15],其控制原理图如图8所示。高速开关阀主要由电-机转换器、阀芯和阀套组成。在工作时由上位机将控制程序导入下位机,下位机产生数字信号通过控制电源(一般通过继电器控制电源或通过功率放大器将下位机产生的数字信号放大)驱动高速开关阀电-机转换器,电-机转换器将数字信号转换成阀芯的动作,其阀芯始终处于两端极限位置,故高速开关阀阀芯通常只有两位,其中两位两通的高速开关阀最常见。

图8 高速开关阀控制原理图
单个高速开关阀的控制方式一般有PMW、脉频调制(PFM)和脉数调制(PNM)等方式,或上述控制方式的复合控制。高钦和等针对高速开关阀流量控制存在的死区和饱和区的问题,利用PFM和PWM相结合的控制方式,使其控制流量线性化[16]。为提高高速开关阀的动态特性,张斌等在传统PWM控制的基础上,提出了三电压控制,降低了阀芯的开启时间[17]。
多个不同控制流量高速开关阀集成的控制方式为脉码调制(PCM)。2015年,Matti Linjama设计了数字式液压阀系统(DVS)将4组126个高速开关阀集成在一个油路块中,油路块采用PCM控制方式(见图9),实验结果表明,该系统可以代替传统的CETOP3伺服阀或比例阀[18]。

图9 DVS油路块
3 智能材料驱动高速开关阀
3.1 磁致伸缩高速开关阀
Hirohisa等提出了一种超磁致伸缩材料(GMM)驱动的共轨比例喷油器,利用3对长度为30 mm、直径为3.5 mm的磁致伸缩棒以间隔120°的角度均匀布置,以保证输出杆稳定,并且两组棒状结构在套筒中串联耦合,这种结构可以在一定轴向尺寸下获得更大的位移,但该结构增大了阀的径向尺寸。GMM棒在套筒中的排布关系如图 10所示。该喷油器中的高速开关阀阀芯最大开口为50 μm,开启时间和关闭时间分别为0.3 ms和0.5 ms,在160 MPa供油压力下流量为1.8 L/min[19]。

图10 GMM棒在套筒中的排布关系
石延平等提出了一种大流量高速开关阀,该阀采用二级控制,其中先导阀(见图11)利用两个磁致伸缩棒,通过杠杆放大机构分别驱动阀芯和阀套,从而增大阀的通油面积,为便于装配,活动阀套设计为分体式。该阀的切换时间为1.4~1.8 ms,5 MPa下最大输出流量为1.24 L/min[20]。

图11 双磁致伸缩先导阀结构
2013年,马孝忠以超磁致伸缩致动器和高速开关阀为研究对象,设计了新型的高速开关阀结构(见图 12),该高速开关阀采用多通流面阀芯结构,阀芯由超磁致伸缩材料直接驱动,在阀芯上开有宽为1 mm,深度为阀芯长度的一半且为均匀布置的2个环形槽,在阀芯均匀布置多个小孔以沟通环形槽进行引流,该结构在相同阀芯位移下提高了通油面积[21],但该阀阀芯结构复杂,装配时由于有多个接触面,易产生油液泄漏。
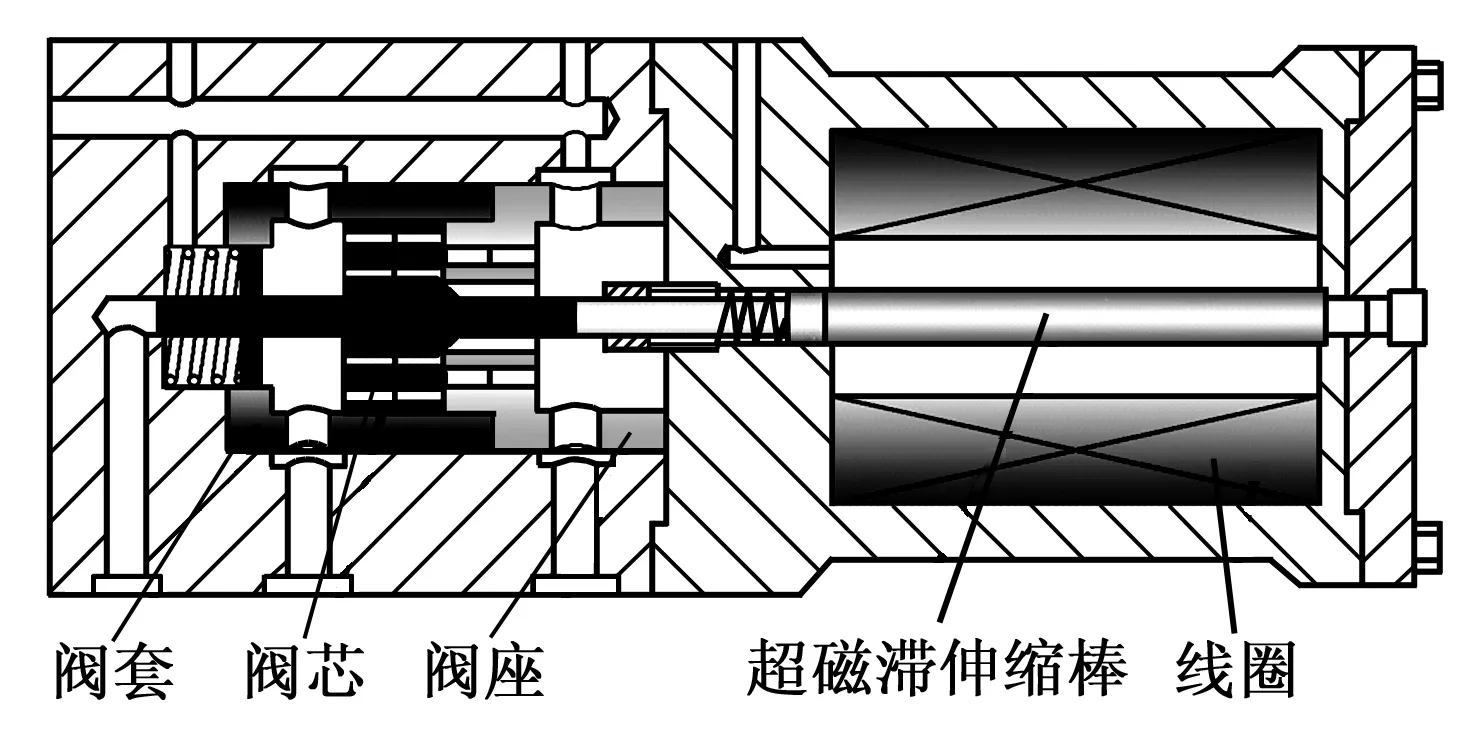
图12 基于GMA的多通流面高速开关阀
3.2 压电叠堆高速开关阀
压电叠堆高速开关阀利用压电叠堆作为电-机转换器,1991年,横土真一提出一种利用压电叠堆材料驱动两位三通高速开关阀作为先导阀,如图 13所示。该阀阀芯采用锥阀结构,压电叠堆两侧布置,一侧有滑动器,可以调节阀芯的零位,该阀的响应速度很快,开关时间小于0.1 ms,控制流量的精度较高,但是阀芯位移只有0.015 mm[22],控制流量较小。

图13 双压电叠堆高速开关阀
图14、15为德尔福公司的第三代共轨系统DFI3压电喷油器。压电叠堆通过液压放大机构直接控制喷嘴针阀的运动,压电叠堆通电时通过液压放大机构使针阀关闭,断电时针阀通过高压燃油的压力开启[23-24]。
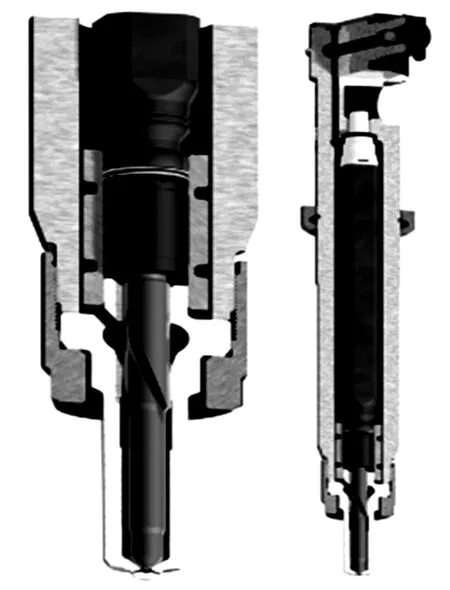
图14 DFI3压电喷油器
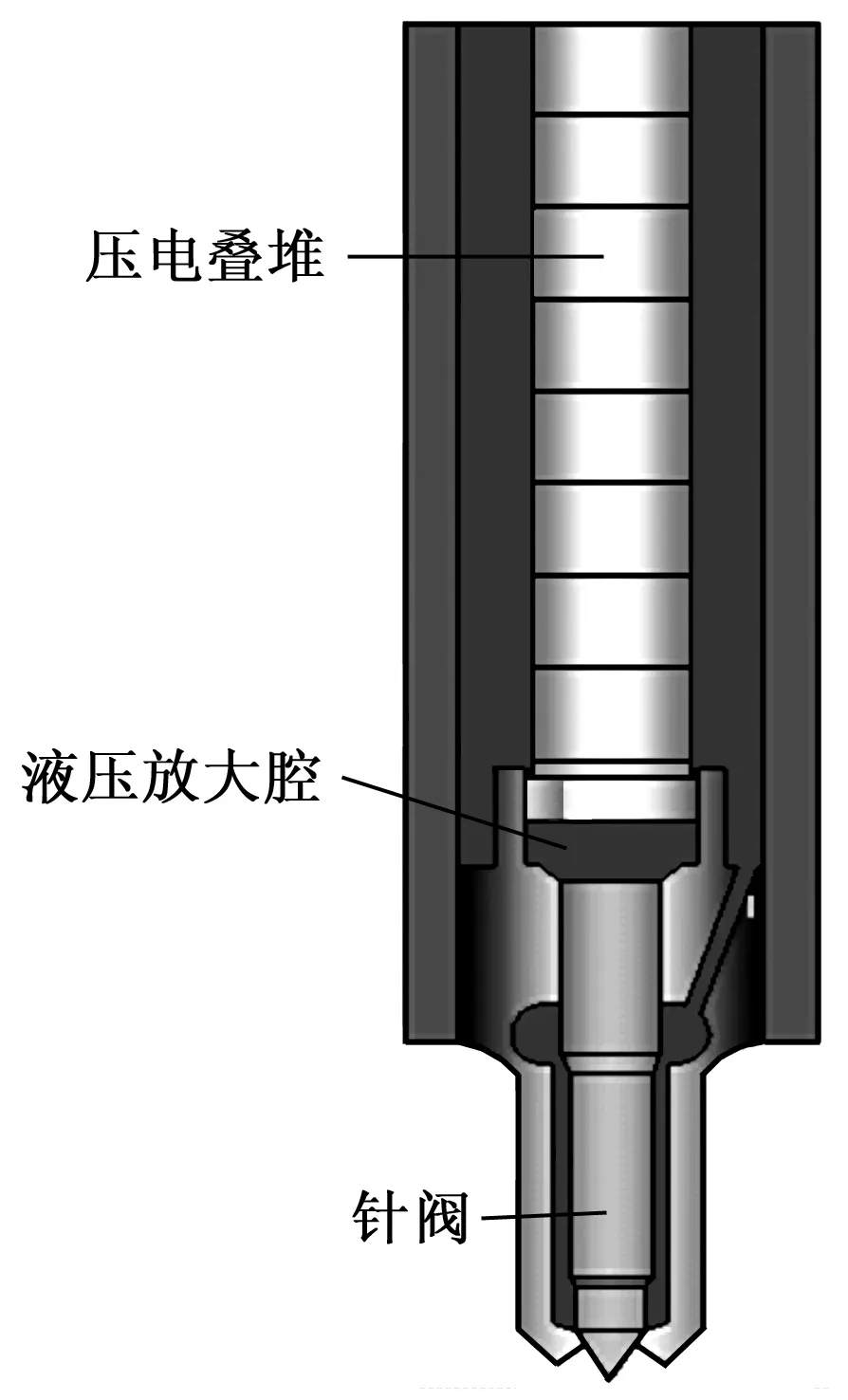
图15 DFI3压电喷油器原理图
2010年,许有雄等研究了一种压电叠堆驱动的两位三通高速开关阀,如图16所示。该阀采用杠杆放大原理对压电叠堆位移进行放大,阀芯设计为挡板式结构,与弹性铰链放大机构做成一体。工作时由压电叠堆通过弹性铰链放大机构带动挡板运动,在150 V输入电压下阀芯位移为47 μm,压电叠堆位移为11.2 μm,其开启时间约为0.57 ms,关闭时间约为0.3 ms,其调制频率达1 kHz,0.5 MPa时空载流量为19.7 L/min[25],但是该结构的挡板打开时需克服静压力,不适合在较大供油压力下工作。
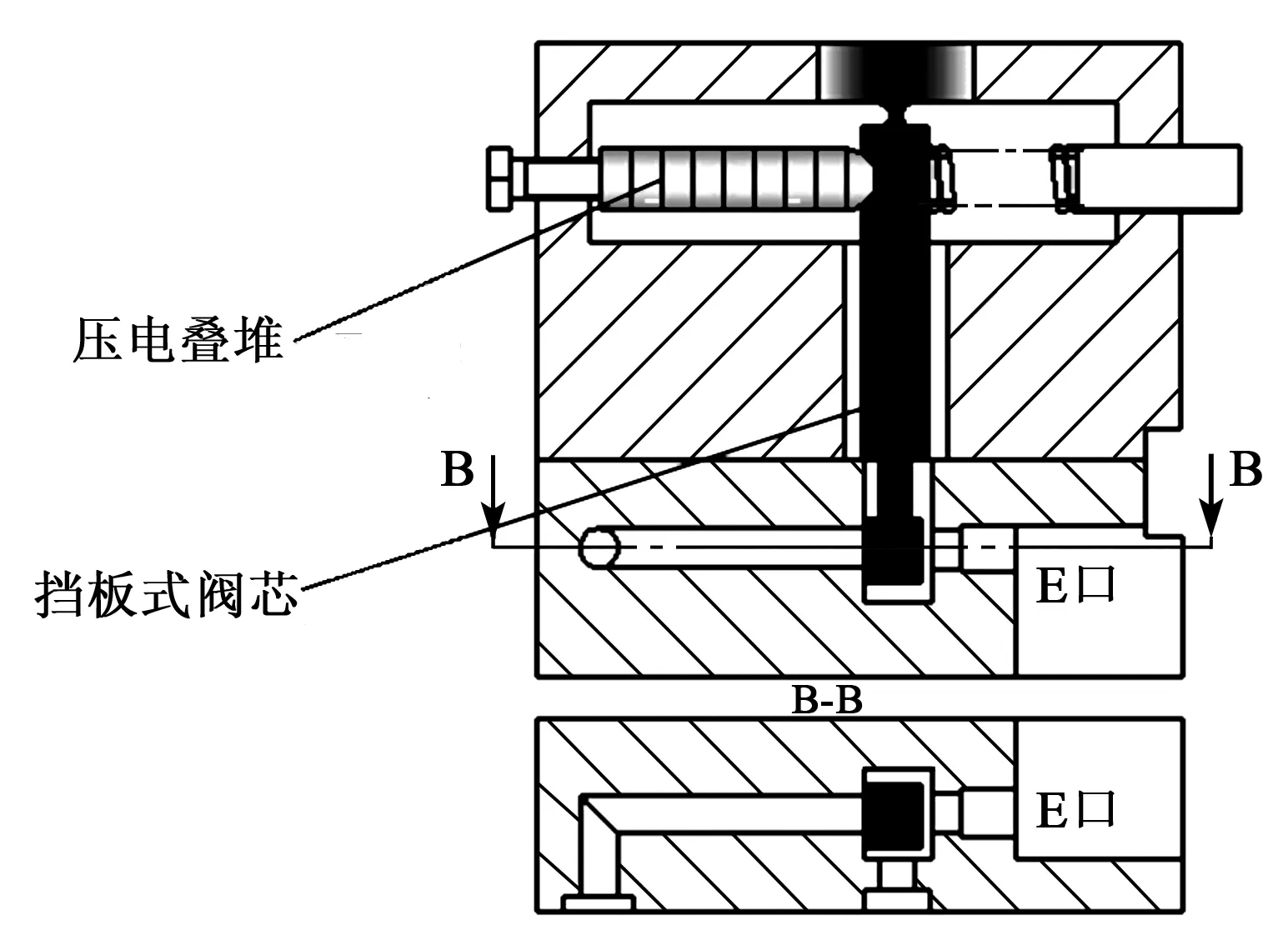
图16 压电挡板式开关阀
3.3 形状记忆合金高速开关阀
SophieNalbach等提出一种基于温控形状记忆合金(SMA)的高速开关阀(见图 17),形状记忆合金丝拉动阀芯动作,阀芯靠弹簧复位。当形状记忆合金丝线径为0.25 mm时其阀芯最大行程为3.5 mm,在控制电流为4 A时阀芯开口时间小于0.3 s,阀芯最大关闭时间为0.8 s。但是当线径为0.5 mm时最大关闭时间达到2 s[26]。

图17 SMA高速开关阀
覃艳金等设计了基于磁控形状记忆合金(MSMA)两位三通高速开关阀,原理图如图 18所示。由对称布置的两个磁控形状记忆合金电-机转换器通过差动方式直接驱动阀芯动作,其中磁控形状记忆合金的激励磁场由线圈通电产生[27]。

图18 磁控形状记忆合金高速开关阀
3.4 磁流变高速开关阀
NORMAN M Wereley教授在混合液压作动器中使用磁流变液(MR)设计高速开关阀,并利用4个磁流变液高速开关阀构成液压桥路控制液压缸运动[28],其结构原理和实物分别如图19、20所示。在该状态下,Q2和Q4关闭,Q3和Q1打开,液压缸向上运动。

图19 混合液压作动器原理图

图20 混合液压作动器实物图
2012年,莫子勇设计了一种基于磁流变液的高速开关阀,采用双线圈控制(见图21),该阀利用磁流变液作为先导阀控制主阀芯运动,主阀为二通插装式锥阀。先导阀通电时,其工作间隙处磁流变液变为近似固体,此时先导阀关闭,主阀控制腔油压与主阀进油口油压相等,在弹簧力作用下,主阀阀芯关闭。先导阀断电时,其工作间隙处磁流变液为牛顿流体,先导阀处于打开状态,进油腔压力大于控制腔压力,主阀阀芯打开[29]。

图21 磁流变液插装式高速开关阀
3.5 国内外智能材料驱动的高速开关阀对比
综上所述,国内、外智能材料驱动的高速开关阀部分参数对比如表1所示。在智能材料驱动的高速开关阀方面,国内、外都进行了大量的研究,国外在1991年就有相关方面的研究,且取得了一定的成果,压电叠堆驱动的高速开关阀已在汽车的燃油喷射器上使用。国内在相关方面的研究略晚,且大多都处于仿真研究阶段,与国外相比还有一定的差距。对于不同智能材料驱动的高速开关阀,通过对比可知,利用压电叠堆驱动高速开关阀的响应时间最快,磁致伸缩材料次之,温控形状记忆合金最慢。
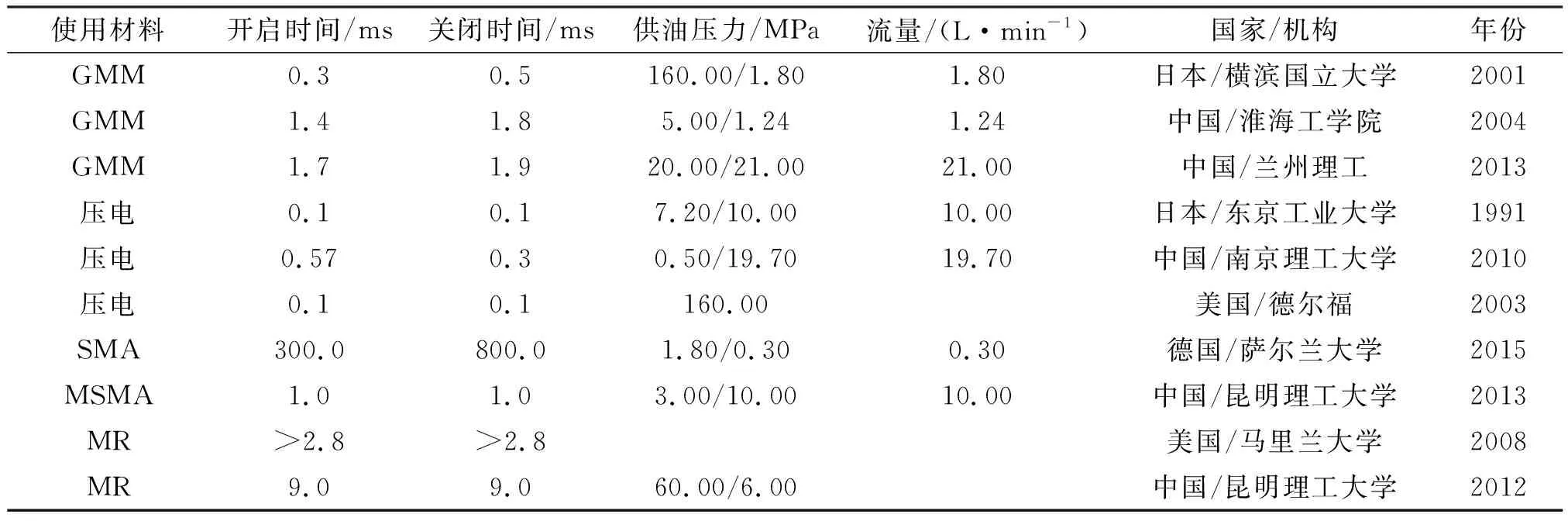
表1 国内外智能材料驱动的高速开关阀对比
4 总结与展望
高速开关阀可利用其高频特性,即快速的开关动作而达到近似连续的流量或压力控制效果,由于传统电磁式的电-机转换器存在频响不高,推力不足等问题,利用智能材料作为电-机转换器可以提高高速开关阀的频响和流量输出精度。在具体应用上,由于压电和磁致伸缩材料的高频响,高输出力和小输出位移的特性,可以牺牲一部分频响和输出力来控制更大的流量,如通过增加阀芯通径、增加微位移放大装置或作为先导阀。对于温控形状记忆合金,迅速准确的温度控制较难,基本上不适合应用于高速开关阀。MSMA的变形率可以满足高速开关阀的要求,但输出力较小,且形变需靠外力才能恢复,较大的外力可以提高频响但会降低输出位移,在高速开关阀上使用需综合考虑频响和输出位移,还要考虑温度对MSMA的影响。基于MR设计的高速开关阀无运动部件,其结构和加工最简单,因此阀的成本较低,但使用工作介质MR较贵,设计时需综合考虑高速开关阀和MR的成本。
本文阐述了不同类型的智能材料电-机转换器性能特点,并分析了各类型智能材料电-机转换器在高速开关阀上应用的优缺点,综述了国内外智能材料驱动高速开关阀的研究现状和特点。
猜你喜欢
科学咨询(2020年53期)2020-03-19
科学技术创新(2020年21期)2020-01-06
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
航天器工程(2019年1期)2019-03-06
振动工程学报(2017年6期)2018-04-11
科学家(2015年12期)2016-01-20
综合智慧能源(2015年12期)2015-04-24
中国工程咨询(2015年8期)2015-02-16
