一种卫星反作用飞轮延寿方法
2019-03-06 01:10:46
航天器工程 2019年1期
(西安卫星测控中心,航天器在轨故障诊断与维修重点实验室,西安 710043)
反作用飞轮(以下简称飞轮)是卫星姿态控制系统中重要的惯性执行机构,具有可靠性好、控制精度高和功耗低等优点[1-2]。它通常采用轴承组件作为旋转和支撑的组件单元,长期频繁使用会造成轴承磨损。例如,基于零动量控制的在轨侧摆机动成像卫星,需要频繁采用飞轮实现高精度姿态控制,导致飞轮因长期轴承摩擦引起工作电流、温度增大,出现性能退化或失效,影响卫星姿态安全。因此,研究飞轮延寿方法,对于确保卫星姿态安全,进而确保航天任务的有效完成具有重要作用。
要延长飞轮寿命,就要减少其工作时间,这就要求卫星上能够产生其他形式的力矩进行姿态控制。磁力矩器的工程应用已经十分成熟[3-6],通过引入磁力矩器工作,实现磁力矩器与飞轮的联合姿态控制,能减少飞轮工作时间,是一种可行的飞轮延寿策略。目前,对磁轮联合控制的研究取得了一定的成果。文献[7]中研究了飞轮故障时通过磁轮联合控制实现小卫星三轴高精度姿态控制问题,文献[8]中研究了使用磁轮联合控制实现小卫星初始姿态快速捕获问题,文献[9]中研究使用磁轮联合控制实现小卫星姿态机动的问题。以上磁轮联合控制研究主要针对磁轮力矩分配问题,用于解决小卫星的姿态控制问题,而对于卫星在飞轮性能退化条件下如何减少飞轮工作时长、延长其在轨使用寿命这一问题,针对性不强。
本文提出一种姿态机动时轮控、正常稳态模式时滚动轴磁控(飞轮不接入系统)的磁轮联合控制方法,通过仿真分析对联合控制方法中滚动轴稳态磁控算法进行验证,最后对所提出的控制方法进行了在轨验证。
1 磁轮联合控制方法
磁控在微小卫星中可用于单独的姿态控制,或者磁控与飞轮同时工作实现姿态控制。由于磁控力矩较小,大多数卫星常使用飞轮进行姿态控制,使用磁控进行飞轮卸载。磁控力矩虽然较小,但可替代飞轮进行稳态模式下的姿态保持,从而减小飞轮工作时间,延长飞轮的工作寿命。因此,本文提出姿态机动过程采用三轴轮控,姿态稳态过程滚动轴采用磁力矩器进行控制,滚动轴飞轮不接入系统工作。
姿态机动模式下采用比例积分微分(PID)轮控,在正常稳态模式下使用比例微分(PD)磁控,从而减少飞轮稳态工作时间,延长其在轨工作寿命。由于磁力矩器在卸载或入轨捕获外的其他阶段并不工作,因此要在正常稳态模式下使用磁控,首先要确定磁控力矩大小,具体是通过三轴磁力距器磁控电流大小来确定。确定磁控力矩大小后,再进一步确定磁控与轮控方式的切换条件及过程。
1.1 正常稳态模式下滚动轴PD磁控
磁控工作原理为:根据卫星姿态信息,在卫星本体坐标系下,磁力矩Tc主要由图1所示的磁力矩器产生的磁矩M=[MxMyMz]及地球磁场强度B=[BxByBz]作用产生,见式(1)。

图1 卫星本体坐标系下磁矩及磁感应强度分解
(1)
由于太阳同步轨道By较小,产生X轴(滚动轴)控制力矩主要依靠Y轴(俯仰轴)磁棒的磁矩My和Z轴(偏航轴)磁场强度Bz。因此,通过My和Bz控制X轴干扰力矩引起的姿态和角速度超差,而Y轴和Z轴干扰力矩引起的姿态和角速度超差采用轮控。
若已知卫星的姿态偏差e和角速度偏差ω,采用PD控制算法,则三轴控制力矩可表示为
Tc=-Kpe-Kdω
(2)
式中:比例系数Kp=[KpxKpyKpz]T;微分系数Kd=[KdxKdyKdz]T。
Tc确定后,由地磁场强度B及组合控制矩阵Λ(b),可确定磁力矩器三轴控制磁矩为
Mc=BΛ-1(b)Tc/‖B‖2
(3)
式中:地磁场强度单位矩阵b=B/‖B‖。
由式(3)得Mc,则三轴磁力矩器控制磁电流Ic可由式(4)[10]得到。
(4)
式中:μe为磁棒有效磁导率;N为线圈匝数;l为磁棒长度;V为磁棒体积。
1.2 姿态机动模式下PID轮控
PID控制算法是将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制[11]。姿态机动采用飞轮PID控制算法,控制律如下。
(5)
式中:积分系数Ki=[KixKiyKiz]T;φ,θ,ψ分别为滚动角、俯仰角和偏航角;t0为控制开始时刻。
飞轮采用开环+闭环的姿态机动模式,如图2所示。接收到姿态机动控制角a时,首先进行开环运行,飞轮以一定的速率先加速运行至a/2,然后以同样的速率减速运行,减速时间与加速时间相同;开环结束后,在正常稳态(包括零姿态和偏置姿态)接入飞轮PID闭环控制,用于消除开环控制的姿态误差,并维持姿态稳定。非机动轴(俯仰轴和偏航轴)始终采用飞轮PID控制算法。

图2 滚动轴机动和稳态控制示意
1.3 姿态控制方式切换
滚动轴姿态机动结束恢复至零姿态后,在滚动角及角速度小于一定值时接入滚动轴磁控;磁控状态下,滚动轴飞轮处于不工作状态,保持零转速;若滚动轴磁控姿态超差或者偏航轴飞轮转速偏高,为确保安全,控制系统将自主切换到三轴飞轮PID控制;磁控制切换到飞轮控制后满足磁控接入条件时,控制系统又自主切换回磁控。通过增加稳态滚动轴磁控时间,可减少稳态飞轮工作时间。
姿态机动模式仍采用开环+闭环形式,开环控制结束后接入单飞轮PID控制,用于消除开环控制的姿态误差并维持偏置姿态稳定,见图3。非机动轴(俯仰和偏航轴)控制算法不变,仍为飞轮PID控制。稳态下,滚动轴磁力矩器和飞轮联合控制接入流程见图4。

图4 稳态模式下磁控与飞轮联合控制切换流程
1.4 磁控接入条件分析
由于地磁场强度B在卫星本体坐标系中的表达式是相当复杂的,因此采用磁控未必总能得到理想的控制力矩Tc。稳态控制的目的主要是克服内外干扰力矩对卫星姿态的影响,对于滚动轴磁控,地磁场强度与卫星本体滚动轴夹角存在接近0°情况,即B与卫星本体滚动轴平行(升降交点附近),此时无法产生滚动方向理想磁控力矩,在干扰力矩作用下,姿态误差变大。
滚动轴磁控62 400 s的数学仿真结果如图5所示。滚动姿态误差变大是在地磁场强度与卫星本体滚动轴夹角接近0°时,此时无法产生该滚动方向理想磁控力矩,在干扰力矩作用下,滚动姿态出现较大姿态控制误差。

图5 滚动角磁控曲线
综上分析,由于磁力矩器的磁矩较小,磁控力矩较弱,地磁场强度复杂,升降交点附近不能产生滚动轴理想的控制力矩,因此,为确保卫星安全,需要在地磁场强度与滚动轴夹角较大时接入磁控,同时要具备稳态磁控时姿态超差退回轮控的能力。
2 仿真分析
设置具体的磁控接入对应的滚动角及角速度大小,对磁轮联合控制方法进行地面仿真分析,以验证稳态模式下滚动轴磁控和飞轮控制自主切换功能,仿真结果如图6~8所示。稳态模式下,滚动轴采用磁控,俯仰轴、偏航轴采用轮控;磁控制状态下,滚动轴飞轮保持零转速,均为不工作状态;假设磁控接入条件为卫星滚动角小于6°,滚动角速度小于0.02(°)/s。通过判断滚动角及角速度大小,稳态滚动磁控与轮控能够实现自主切换,切换轮控后可恢复到卫星上原来的三轴飞轮PID控制模式,轮控稳定后,判断姿态满足设定条件,因此又恢复磁控状态。

图6 稳态控制三轴姿态曲线

图7 稳态控制飞轮转速曲线

图8 稳态控制滚动磁控与轮控自主切换Fig.8 Autonomous switching of flywheels and magnetorquer in steady state rolling control
3 在轨验证
以某在轨卫星为例,对本文提出的延寿方法进行验证。该卫星采用零动量轮控的姿态控制方式,控制系统共配置6台飞轮,在卫星上的安装位置如图9所示。在正常稳态工作时,启用Xa,Ya,Za主份飞轮工作;当滚动轴进行姿态机动时,同时启用滚动轴的Xa和Xb飞轮进行姿态机动。该卫星在轨期间Xa和Xb主备份飞轮出现电流、温度小幅增大趋势,经分析发现是因为飞轮保持架问题导致轴承摩擦力矩增大。将本文方法应用于此在轨卫星,磁控实施前后飞轮转速变化如图10所示。由图10可知:磁控接入前,在轨稳态运行采用飞轮PID控制,转速在150 r/min以内;实施磁控后,滚动轴Xa飞轮转速始终为0 r/min,俯仰轴Ya飞轮、偏航轴Za飞轮转速在50 r/min以内,表明卫星滚动轴(X轴)始终处于磁控模式下,没有切换到轮控模式,同时卫星滚动轴姿态角始终小于6°,三轴角速度始终小于0.02(°)/s,分别如图11和图12所示。
稳态情况下,滚动轴飞轮停转后,飞轮电流为0,Xa飞轮温度开始下降,稳定于16°左右。磁控前后Xa飞轮电流、温度变化如图13所示,磁控前电流、温度缓慢增大,磁控接入后,由于飞轮不工作,电流、温度迅速下降,并趋于稳定。

图9 飞轮配置示意

图10 磁控实施前后飞轮转速变化曲线Fig.10 Speed change curve of flywheel before and after magnetic control implementation
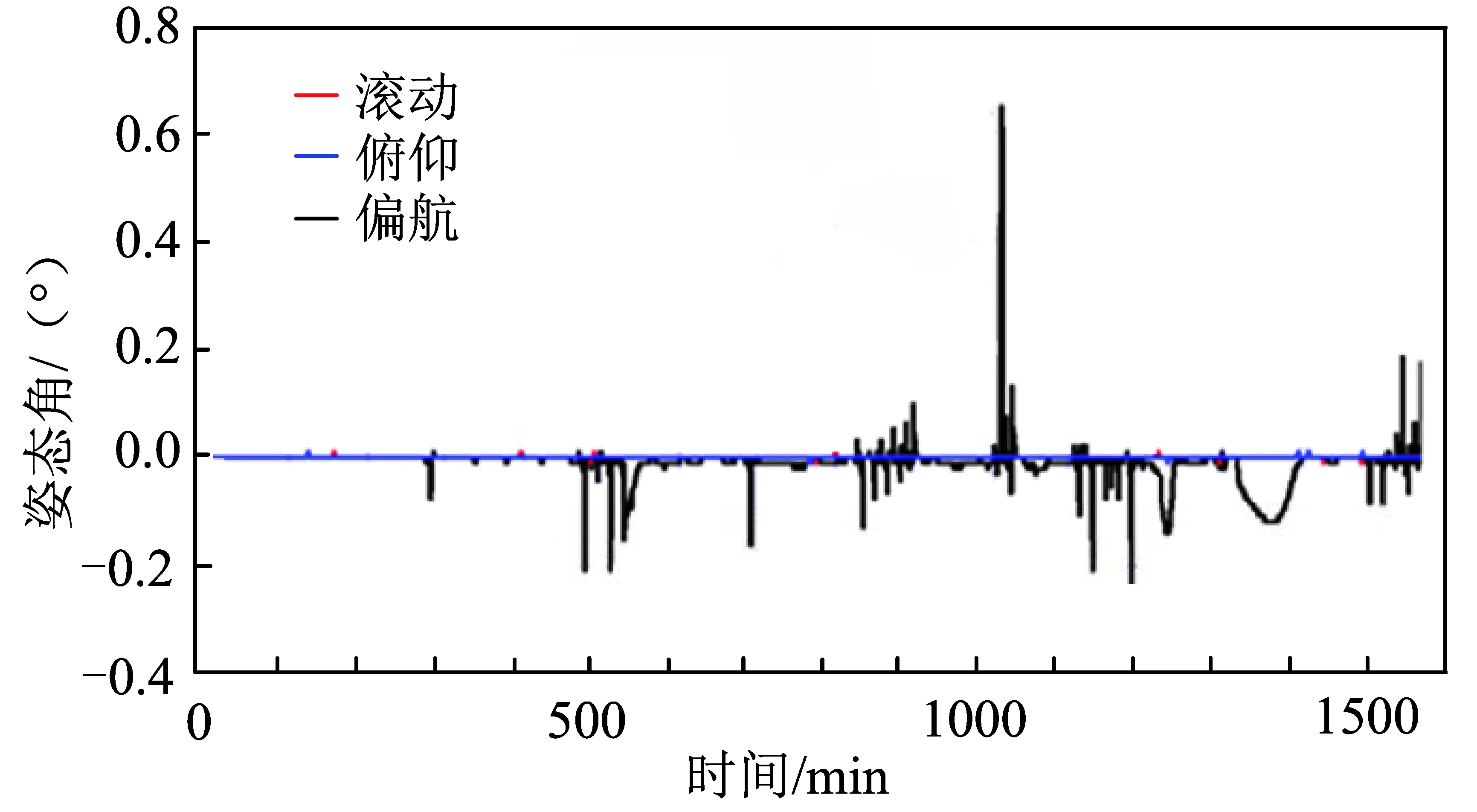
图11 稳态飞行情况下卫星三轴姿态角遥测曲线Fig.11 Telemetry curve of three-axis attitude anglein satellite steady state flight
稳态情况下,实施磁控前,磁电流不为0,磁电流与磁场相互作用产生的磁力矩用于飞轮卸载,其目的是把飞轮转速维持在设定的阈值附近。实施磁控后,滚动轴飞轮停转,转速电流均为0,完全不产生作用力矩,仅靠磁力矩来抵消空间环境干扰力矩,所以滚动轴较实施磁控前需要较大磁力矩。滚动轴磁力矩靠俯仰轴和偏航轴磁棒产生(磁力矩的方向垂直于磁电流和磁场强度所在的平面),实施磁控后,俯仰轴和偏航轴磁棒磁电流会增大,由于环境干扰力矩是周期性的,因此磁电流也是周期性变化的,如图14所示。

图13 磁控实施前后Xa飞轮电流、温度变化曲线

图14 磁控实施前后磁棒电流变化曲线Fig.14 Change curve of magnetic bar current before and after magnetic control implementation
磁轮联合控制方法实施以后,卫星遥测数据显示,滚动轴姿态超差最大约2.6°,且绝大部分时间均小于1°,卫星稳态情况下没有自主切换回PID轮控方式,与数学仿真结果一致。同时,实施磁轮联合控制以前,飞轮1天(24 h)一直处于工作状态,实施磁轮联合控制后,卫星遥测数据显示,飞轮工作电流、温度均在门限值内,1天平均工作时间为56 min,可见飞轮工作时间显著减少,飞轮寿命得到延长。
4 结束语
本文提出的应用磁轮联合控制的飞轮延寿方法,可实现卫星的三轴稳态控制,滚动角采用俯仰轴磁矩和偏航轴方向的磁场分量控制,俯仰轴和偏航轴仍采用飞轮PID控制方式。在轨卫星飞轮性能下降后,控制系统在稳态接入磁控,在姿态机动过程中和滚动角超过设定阈值后,卫星三轴仍采用PID轮控方式。卫星滚动轴采用磁控方式后,大大减少飞轮工作时间,飞轮状态有所恢复,控制系统所采用的策略可以延长飞轮在轨使用寿命,对其他采用轮控的在轨卫星,在飞轮性能退化情况下延长其使用寿命具有一定借鉴意义。
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:22
装备制造技术(2021年1期)2021-05-21 07:54:44
模具制造(2019年7期)2019-09-25 07:30:00
自动化学报(2018年2期)2018-04-12 05:46:05
中国自行车(2017年11期)2017-04-04 02:51:30
电气技术(2016年3期)2016-10-14 06:06:50
通信电源技术(2016年4期)2016-04-04 02:57:36
校园英语·中旬(2015年7期)2015-08-10 01:35:27
综合智慧能源(2015年12期)2015-04-24 07:15:22
意林(2014年1期)2014-07-05 05:54:04