
开放GNSS原始测量对安卓平台定位精度影响分析
2019-08-28 09:52:26李四海
导航定位学报 2019年3期
杨 琪,李四海,刘 洋
开放GNSS原始测量对安卓平台定位精度影响分析
杨 琪,李四海,刘 洋
(西北工业大学 自动化学院,西安 710129)

安卓设备;原始测量;接收机;信噪比;定位精度
0 引言
随着全球卫星导航系统(global navigation satellite system, GNSS)技术的不断完善和成熟,便捷的高精度定位信息获取使得基于位置服务(location-based services, LBS)的智能设备(手机/平板/可穿戴设备等)数量急剧增长,LBS智能设备的普及正在逐步影响并改变人类的生产和生活方式。现在广泛使用的基于安卓(Android)系统的智能平台,在系统层面只提供GNSS定位结果的应用程序接口(application programmers interface, API)供手机应用程序进行调用,用户只能得到最终定位信息,无法获取原始测量(伪距和载波相位观测值)。这样的系统框架简化了应用程序开发工作,但在很大程度上制约了Android平台GNSS系统定位精度和可靠性的进一步提高。2016年5月,谷歌宣布从Android Nougat系统开始,开放GNSS原始测量信息[1-2],用于提高Android系统GNSS定位精度和可靠性,促进LBS应用的进一步发展。自2016年5月在谷歌I/O开发者大会上宣布开放GNSS原始测量信息以来,如何用Android智能设备高精度定位,目前的技术能使定位到达什么样的精度就是亟需解答的问题[3]。谷歌对Android系统原始GNSS数据的开放,引起了导航领域的巨大关注,在2017年9月份召开的ION GNSS+ 会议上,专门设置了《智能手机原始GNSS观测应用》议题,来自欧洲宇航中心、联发科、空客、Trimble、GMV、日本卫星定位研究中心等研究机构和意大利、韩国、加拿大等高校的研究人员针对智能手机原始测量和高精度定位应用进行了交流[4-5]。从美国导航协会(The Institute of Navigation, ION)会议交流情况来看,目前国外大部分研究仍处于演示验证阶段,在原始数据质量分析、高精度定位技术实现和对比、不同环境和硬件平台等因素影响等方面都值得展开进一步研究。
在这样的背景下,本文以手机和平板为例,利用2种设备提供的GNSS原始测量信息分析原始信息质量以及不同技术所能达到的实际定位精度,并与不同等级的接收机进行对比[6-8]。
1 原始测量信息的获取
安卓操作系统有一个特殊的接口,称为API(应用程序编程接口),允许用户访问系统的功能。在Android N中嵌入的24级API 中利用GNSS Measurement类和GNSS Clock类增加了对安卓设备中GNSS测量值的访问[9-10]。该接口会输出完整标准RINEX文件需要的所有元素,包括伪距、载波相位、多普勒和信噪比。但是,安卓设备直接提供的是与时间相关的各类参数,而并非标准RINEX格式,具体参数定义以及转换方法如下:
getTimeNanos():获取接收机内部硬件时钟值(单位:ns),是安卓设备启动后的时间计数器;
get Full Bias Nanos():获取接收机内的硬件时钟与实际全球定位系统(global position system, GPS)时间的差值(1980年1月6日开始的GPS参考时间)。如果接收机估计了GPS时间,这个值是可用的。如果计算的时间为非GPS星座,须加上该星座到GPS的时间偏移量。并且此偏差只在开始时使用一次,用来估计接收时钟的额外漂移;
get Bias Nanos():获取亚纳秒级时钟偏差;
get Time Offset Nanos():获取纳秒级时钟偏差;
根据上述时间参数估计出接收时间和发射时间,从而得到RINEX格式中定义的伪距,具体方法如图1所示。

图1 伪距生成原理
get Accumulated Delta Range Meters():获取载波相位测量值,该值是载波相位量测与载波频率相乘再取负所得;
get Accumulated Delta Range State():检测载波相位测量值是否复位或周跳;
get Pseudorange Rate Meters Per Second():获取伪距率值,该值与多普勒频移量成正比;
getCn0DbHz():获取信噪比;
综合上述参数,可以得到RINEX格式的手机原始测量数据。
2 试验设备简介
对于卫星导航产品而言,GNSS硬件的成本和精度是主要参考因素,根据成本高低将试验设备分为3种等级:成本高的测量级接收机NovAtel OEM 638、低成本接收机u-blox m8n、超低成本的安卓平台接收机芯片HuaweiP20及Nexus 9- Broadcom BCM4753,具体参数如表1所示。

表1 不同等级的接收机分类
3 静态试验结果与分析
文中静态试验地点选在西北工业大学自动化学院楼天台,试验点环境空旷,周边无其他物体对其进行干扰,4个设备同时进行数据采集,用单点定位、伪距差分、载波相位差分、单频精密单点定位等不同定位技术进行事后处理,结果如下:
首先分析相同设备同种定位技术在不同算法处理后的定位精度,对平板数据采用单点定位技术进行处理,算法采用加权最小二乘法,未使用多普勒平滑伪距进行计算时水平面误差如图2所示,高方向误差如图3所示。从图2及图3中可以看出以平均误差为参考位置的定位误差图毛刺较大,经计算北()方向标准差为8.2 m、高()方向为25.4 m。
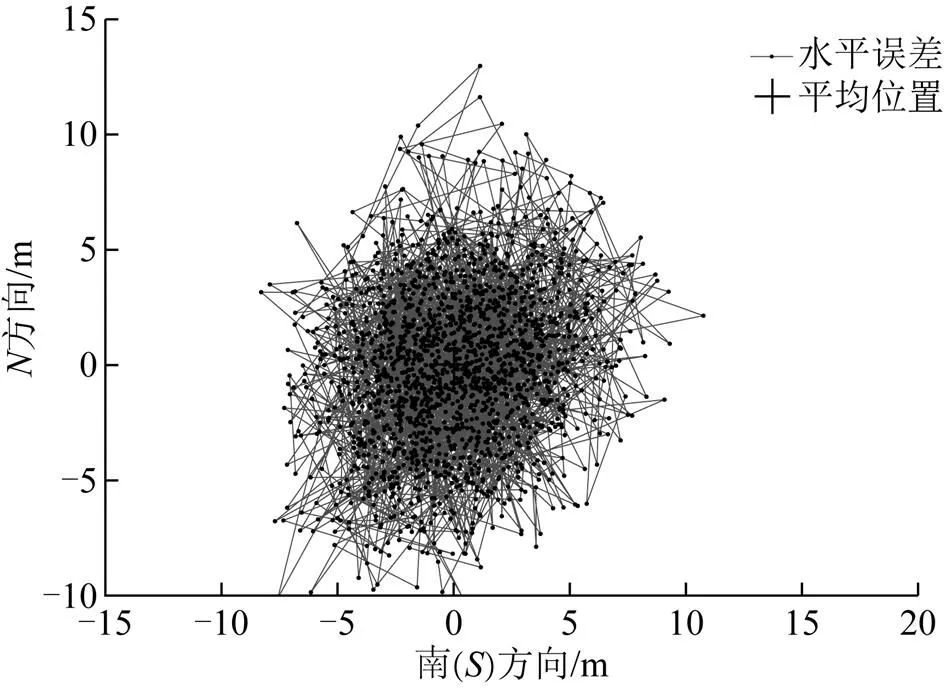
图2 未加平滑水平面定位算法误差
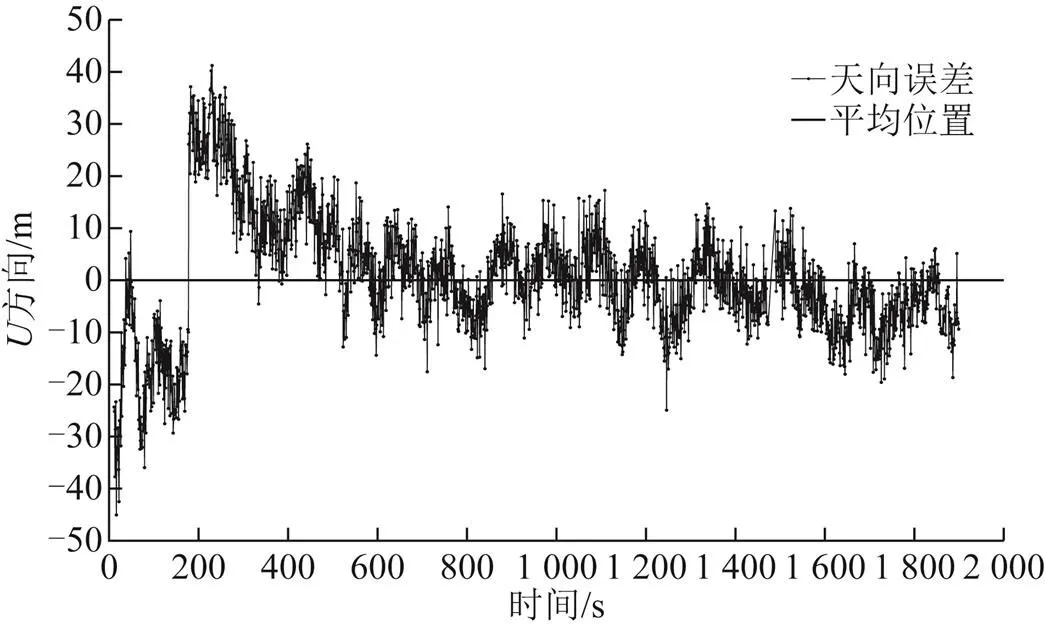
图3 未加平滑高方向定位算法误差
图4、图5是使用平滑后的定位差图,对比可以看出,曲线明显得到平滑,经计算方向标准差为4.6 m、方向为20.7 m。2张图对比可以说明使用多普勒平滑伪距之后单点定位精度和稳定性都有一定程度提高。

图4 加平滑后水平面定位算法误差
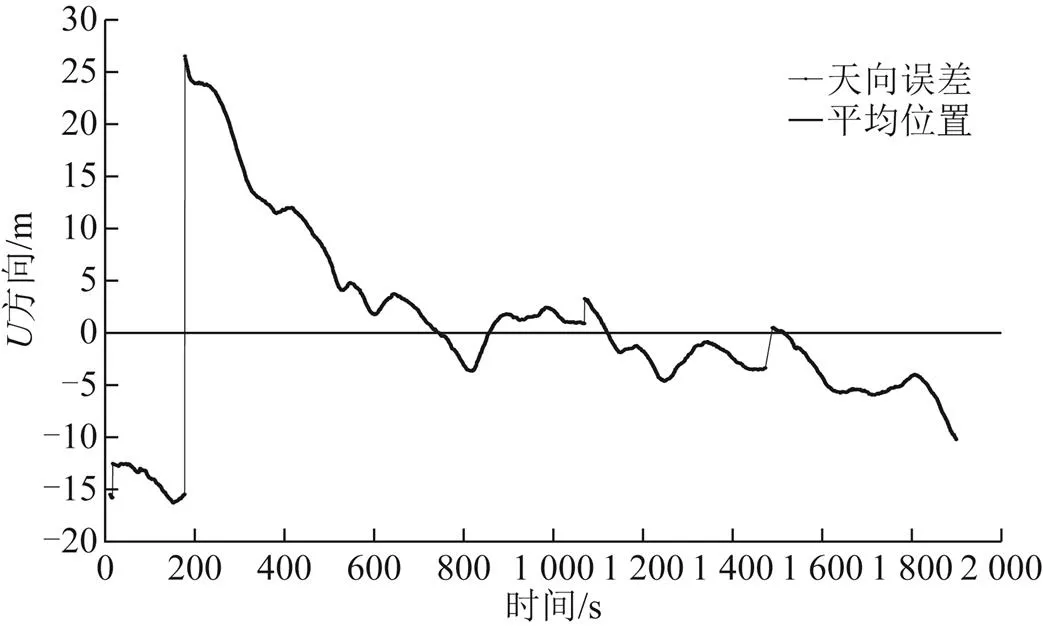
图5 加平滑后高方向定位算法误差
对比试验收集了40 min的的静态数据,图6显示了用于数据收集的3个不同级别4个硬件设备的视图。同时进行数据收集,以确保大气、多路径等环境条件保持一致。
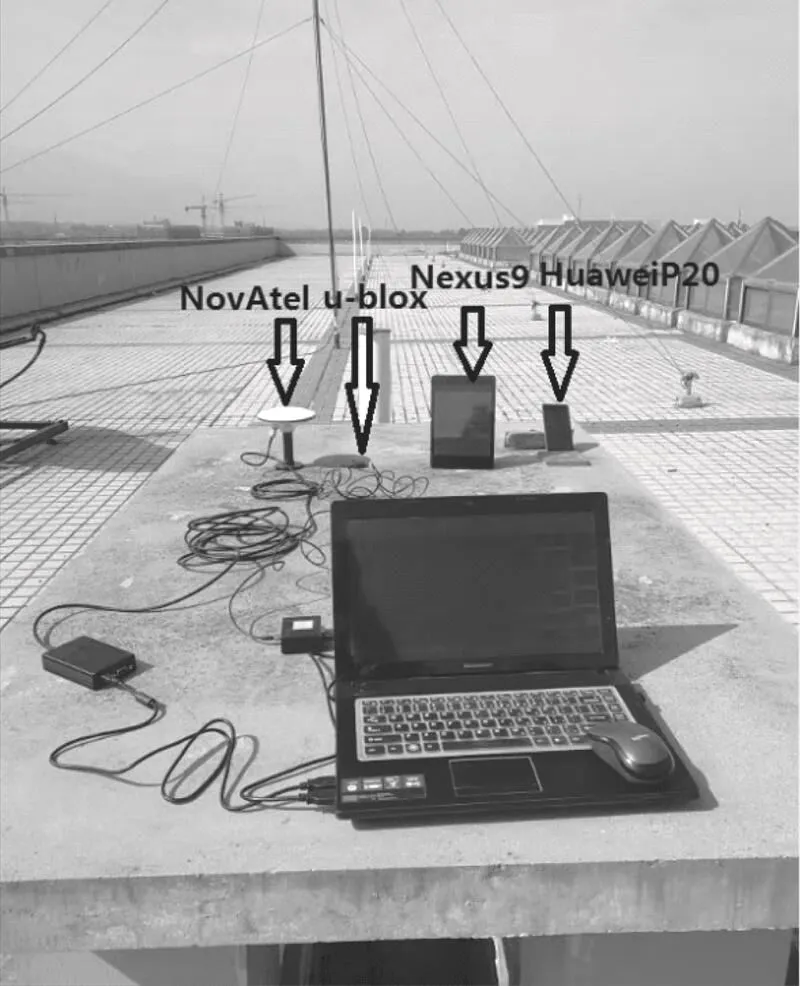
图6 静态试验环境
信噪比即接收的载波信号与干扰噪声功率谱密度之比是影响GNSS接收机测距精度的重要因素之一。GNSS天线接收功率主要取决于3个因素:①接收GNSS信号的功率密度;②天线有效面积;③天线增益。由于u-blox天线限制及华为P20手机原始测量信息并未覆盖整个GNSS星座,图7至图10以GPS星座为例分别展示了Nexus9、华为P20、u-blox及NovAtel 4个接收机接收卫星信号的信噪比。可以看出Nexus9接收到9颗卫星信号,但整体数值扩散在20~40dB·Hz,曲线毛刺较大;华为手机接收到8颗卫星信号,整体数值集中在37~45dB·Hz;u-blox接收机收到9颗卫星信号,数值集中在37~47dB·Hz;NovAtel接收机收到10颗卫星信号且数值集中在45~55dB·Hz。可以看出接收机安卓设备的信号质量明显低于测量级接收机,也略低于低成本接收机。这是由于安卓设备天线形状、极化方式等硬件条件约束导致信号噪声较大且多路径效应增加。
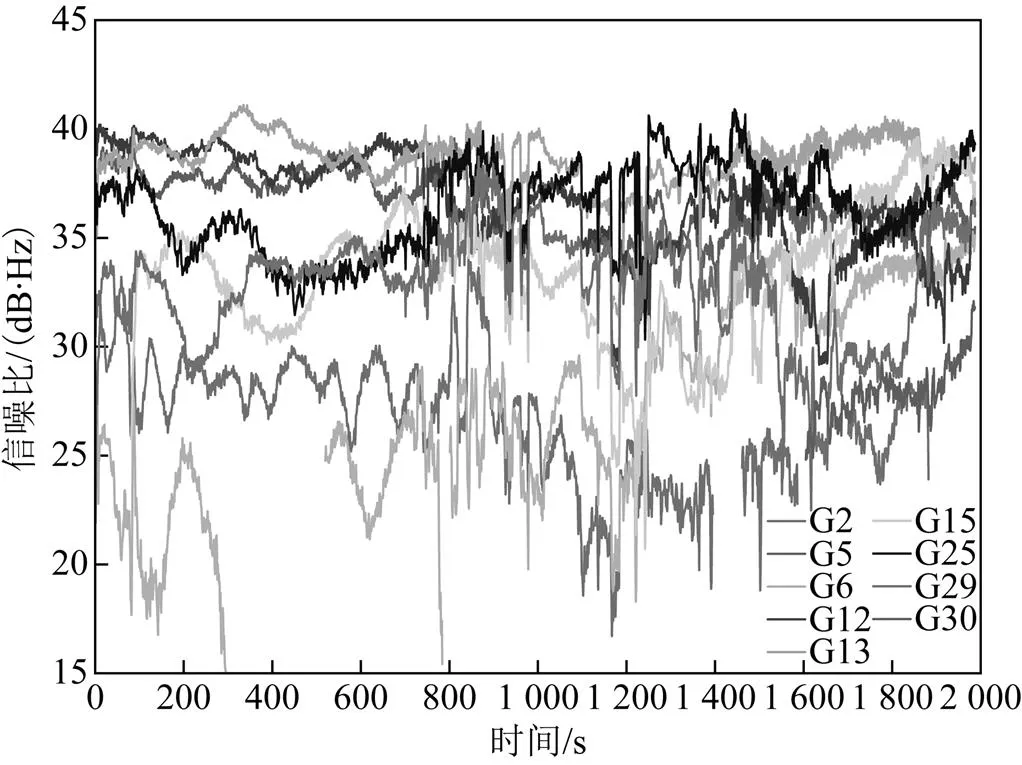
图7 Nexus9接收卫星信噪比

图8 华为P20接收卫星信噪比

图9 u-blox接收卫星信噪比

图10 NovAtel接收卫星信噪比
接下来分析不同设备在同种定位技术下定位精度。鉴于篇幅限制,本文重点分析经度方向定位精度,其他2个方向规律相同(如表3、表4所示)。4种接收机的单点定位误差如图11所示,标准差值(standard deviation, STD)如表2所示。图11和表2结合可以看出,NovAtel接收机定位精度已达到亚米级水平,其余3种均为米级精度。无论是低成本接收机或测量级接收机,定位精度均明显优于安卓设备,其中u-blox与NovAtel定位STD值分别为1.2715、0.8177 m。而手机单点定位STD值为5.7019 m,平板STD值为13.2444 m,这种定位精度可从信噪比角度做出一定解释,平板信噪比值最低,信号质量最差,其定位精度也处于最差水平。
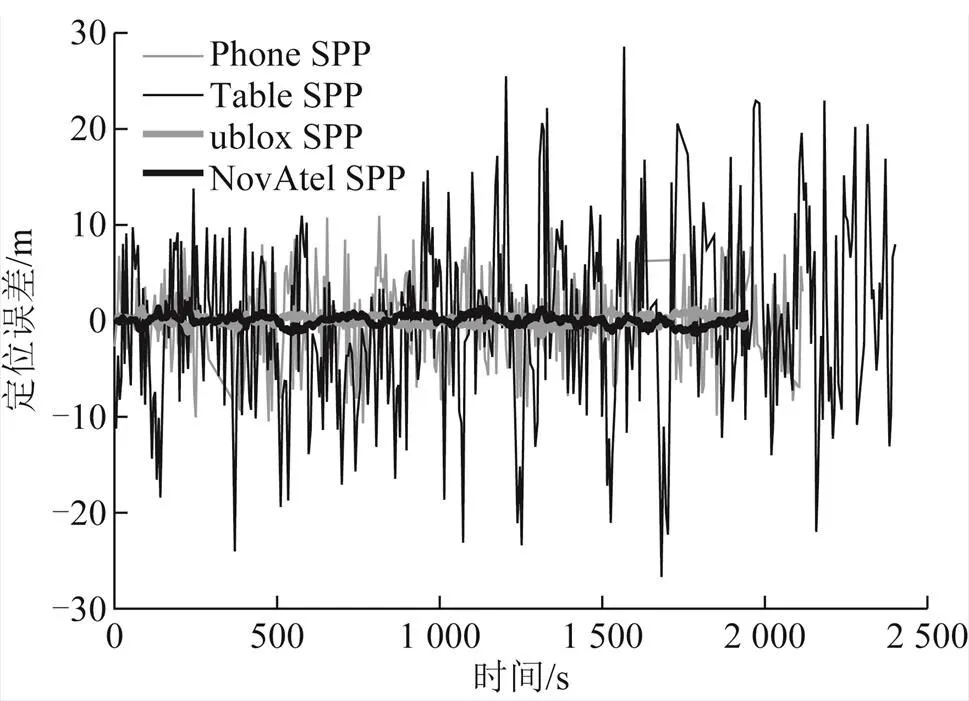
图11 4种接收机经度方向单点定位误差

表2 4种接收机经度方向的STD值 m
图12为手机、平板、u-blox分别与NovAtel进行伪距差分处理后的定位误差图,STD值见表3。结合图表可以看出,相对于单点定位技术,伪距差分处理后定位精度没有明显的提升,这是由于伪距相关原始测量信息受硬件噪声影响较大。

图12 4种接收机经度方向伪距差分定位误差

表3 4种接收机纬度方向的STD值 m
图13为手机、平板、u-blox分别与NovAtel进行载波相位差分处理后的定位误差以及平板精密单点定位误差图,STD值见表4。与上述2种定位技术相比,载波相位差分定位精度明显提高,手机、平板和u-blox分别收敛到0.3、0.6和0.07 m。
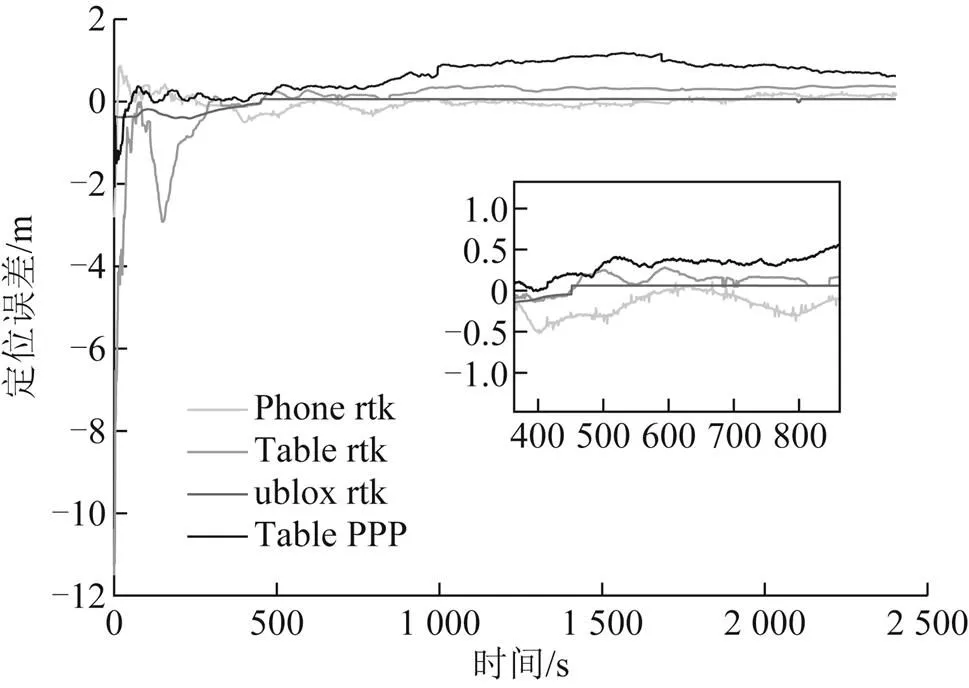
图13 4种接收机载波相位差分定位误差

表4 4种接收机高度方向的STD值 m
最后分析同种设备不同定位技术下的定位精度。就平板而言,4种定位技术定位误差如图14所示,载波相位差分与单点定位和伪距差分定位结果相比定位精度显著提高:静态条件下经过400 s可收敛到0.5 m以内;精密单点定位精度收敛到0.7 m以内。
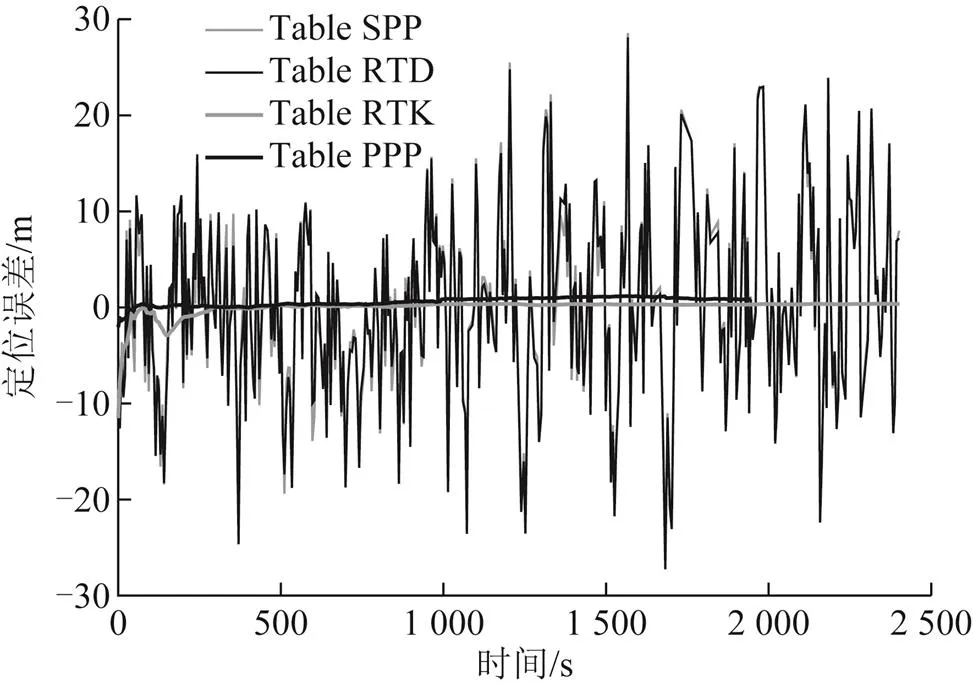
图14 4种定位技术精度对比(平板数据)
4 动态试验结果与分析
为进一步探究安卓平台的定位精度,继续进行一组动态试验,其中Nexus 9平板以及接收机天线沿车身纵向被放置在移动汽车的车顶,基准站数据由NovAtel接收机提供。试验结果如图15、图16所示,定位算法采用载波相位差分算法,其中没有地标标识的直线为NovAtel接收机与基准站差分得到的标准路线,标识地标1线为Nexus 9平板与基准站差分所得的结果,标识地标2线为u-blox与基准站差分得到。造成图15地标1、2线差异的主要原因是安卓设备天线形状及极化方式等硬件条件限制导致信号质量较差,在遮挡较多环境中去除多路径效应的效果较差。在图16遮挡较少的乡村环境中,多路径效应影响较小,安卓设备可以与低成本接收机具有相同的定位精度。
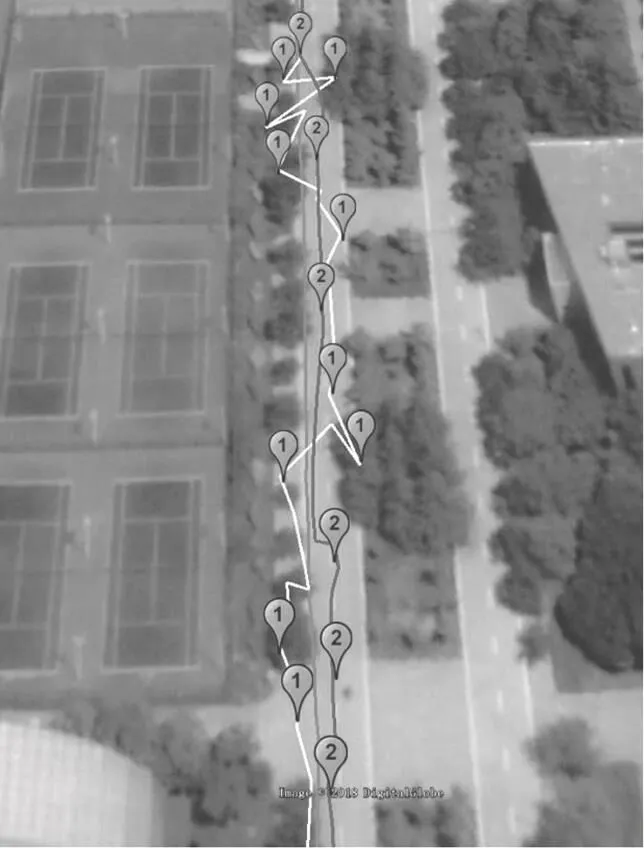
图15 动态试验结果(遮挡较多)

图16 动态试验结果(遮挡较少)
5 结束语
本文选取2个已开放原始测量信息的安卓设备、华为P20手机和Nexus9平板原始测量进行信号质量及定位精度分析,并与低成本接收机u-blox和测量级接收机NovAtel进行对比。结果表明:安卓设备的原始测量质量均低于2种接收机且手机信号质量高于平板信号;安卓设备单点定位水平面内定位精度为5~15m;相对于单点定位,伪距差分对定位精度提升不大,仍为米级水平;载波相位差分和精密单点定位精度均有明显提升,达到分米级水平。动态试验表明,无遮挡条件下采用载波相位差分技术,安卓设备定位精度可达到低成本接收机定位精度相同水平。
[1] PICHAI S. GnssMeasurement[EB/OL].[2018-10-16].https://developer.android.com/reference/android/location/ GnssMeasurement.html.
[2] Anon. European GNSS agency GNSS market report[EB/OL]. (2015-03-20)[2018-10-16]. https://www.gsa.europa.eu/ system/files/reports/gnss_mr_2017.pdf.
[3] SIMON B, FRANK V D. Innovation: precise positioning using raw GPS measurements from Android smartphones[J]. GPS World ,2016(27):43-48.
[4] GILL M, SUNIL B, JOHN A, et al. Precise point positioning (PPP) using low-cost and ultra-low-cost GNSS receivers[C]//The Institute of Navigation. Proceedings of the 30th International technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017). Portland, Oregon: The Institute of Navigation, Inc., 2017: 226-236.
[5] STUART R, WILL L, ADAM C. On the path to precision: observations with Android GNSS observables[C]//The Institute of Navigation. Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017). Portland, Oregon: The Institute of Navigation, Inc., 2017:116-129.
[6] KENNETH P M, ROBERT H W, TODD H E. Centimeter positioning with a smartphone: quality GNSS antenna[C]//The Institute of Navigation. Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014). Tampa, Florida: The Institute of Navigation, Inc., 2014:1568-1577.
[7] PETROVSKI I G. GPS, GLONASS, Galileo and BeiDou for mobile devices[M]. Cambridge: Cambridge University Press, 2014:312-314.
[8] GUAN M, JIAO W, JIA X. Accuracy analysis of BDS pseudorange observation[J]. Geom SciEng, 2017(37):21–25.
[9] Anon. GitHub [EB/OL]. [2018-01-23]. https://github.com/google/gps-measurement-tools.
[10] HERRERA A M, SUHANDRI H F, EUGENIO R, et al. goGPS: open-source MATLAB software[J]. GPS Solutions, 2016(20): 595–603.
Influence of opening raw GNSS measurement on positioning accuracy of Android platform
YANG Qi, LI Sihai, LIU Yang
(College of Automation, Northwestern Polytechnical University, Xi’an 710129, China)
Android device; raw measurement; receiver; carrier-to-noise ratio; positioning accuracy
Sv Time Nanos():获取卫星发送时间(单位:ns),取决于每颗卫星的同步状态。
P228
A
2095-4999(2019)03-0115-06
2018-12-11
西北工业大学研究生创意创新种子基金项目(G2018KY0417)。
杨琪(1995—),女,陕西西安人,硕士生,研究方向为卫星导航与组合导航。
李四海(1962—),男,浙江舟山人,博士,教授,研究方向为惯性系统的对准、导航与标定技术,组合导航与导航综合系统的信息融合技术及应用,民机导航系统等。
杨琪,李四海,刘洋.开放GNSS原始测量对安卓平台定位精度影响分析[J].导航定位学报,2019,7(3):115-120.(YANG Qi, LI Sihai, LIU Yang.Influence of opening raw GNSS measurement on positioning accuracy of Android platform[J].Journal of Navigation and Positioning,2019,7(3):115-120.)
10.16547/j.cnki.10-1096.20190319.
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
少年文艺·开心阅读作文(2019年8期)2019-09-12 03:22:24
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
信息安全研究(2016年4期)2016-12-01 06:06:58
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
导航定位学报(2015年2期)2015-06-05 09:27:38
中国教育网络(2014年10期)2014-03-18 01:27:31
