
激光跟瞄系统粗精复合轴协同控制策略优化研究
2019-08-23 01:20姜晓明王旭烽张伟芳刘宜罡
空天防御 2019年3期
姜晓明,王旭烽,张伟芳,刘宜罡
(上海机电工程研究所, 上海 201109)
0 引 言
高能激光武器系统的高精度跟踪瞄准性能是保证激光毁伤效果的关键。激光跟瞄系统利用粗跟踪系统的大视场、大运动行程以及精跟踪系统的高精度、快速响应的复合轴跟踪控制来实现精密跟踪和瞄准。在工程领域,为提高激光跟瞄系统的性能,粗精复合轴控制结构和方法的应用和优化是必要的。
文献[1-2]探讨并给出了激光武器高精度跟踪瞄准控制技术的一些关键问题。文献[3]给出了高精度跟瞄系统的性能指标需求,分析了激光跟瞄系统中的误差源。文献[4]讨论了双探测器复合轴跟踪控制及其工程应用,详细探讨了探测器视场和带宽匹配问题。文献[5]从频域的角度分析了粗精复合轴跟踪控制的稳定性。文献[6]讨论了单CCD探测器复合轴跟踪控制和解耦策略,解决了大视场和高帧频的矛盾。文献[7-8]给出了双探测器复合轴跟踪控制的仿真结果。
本文讨论了复合轴跟踪控制在工程应用中的一些问题,例如复合轴跟踪系统中粗精交班的稳定性问题等。本文第一章给出了粗精复合轴跟踪控制系统的传统应用;第二章描述了粗精协同跟踪控制策略,利用双模式切换策略实现粗精复合轴跟踪系统在单探测器和双探测器引导模式下的切换控制;第三章给出了仿真和实验结果,验证了方法的有效性;最后给出了本文的结论。
1 粗精复合轴跟踪控制系统
1.1 粗跟踪系统
如图1所示,在激光跟瞄系统中,粗跟踪系统利用粗探测设备和二维跟踪转台实现对目标的捕获和粗跟踪,完成大运动范围的方位和高低运动,粗跟踪系统的主要负载为二维跟踪转台和大口径的发射望远镜。粗探测设备固定在二维跟踪转台的高低俯仰运动轴上,随高低俯仰轴运动。在应用中,为实现粗跟踪系统向精跟踪系统的稳定交班,精跟踪视场一般大于粗跟踪系统跟踪精度的3倍[5]。
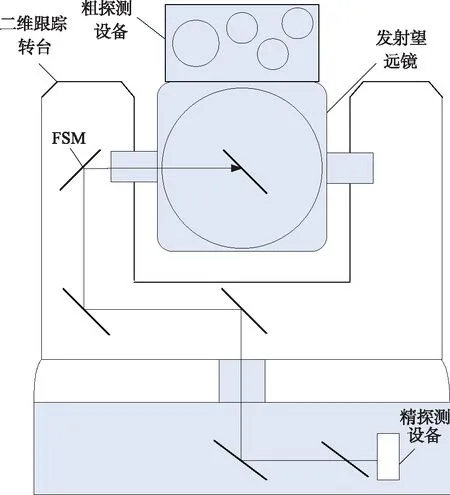
图1 激光跟瞄系统结构示意图Fig.1 Structural diagram of laser tracking and aiming system
为保证跟踪精度,粗跟踪系统采用直接驱动方式,例如采用多级永磁同步电机作为驱动机构,从而减小齿轮传动系统带来的传动误差。粗跟踪系统采用高分辨率、大视场红外/可见光电视探测设备实现对目标的图像跟踪,在跟踪过程中通过粗跟踪电视和粗跟踪红外探测融合的方式,提高粗跟踪系统的抗干扰能力。当电视取差数据有效时,利用电视取差数据进行闭环跟踪;当红外取差数据有效时,利用红外取差数据进行闭环跟踪;当电视和红外取差数据同时无效时,则采取记忆跟踪。设图像采样周期为T,则第k个周期得到的图像处理取差值分别描述为δ(kT)和ε(kT)。
在目标预测过程中,需利用转台的实时方位角α(kT)、高低角β(kT)与取差值进行综合。由于图像处理需要一定的处理周期,因此图像处理结果相对于转台的角度信息有延迟。以τ为处理周期,在处理过程中,将方位角和高低角人为延迟τ的周期,与取差值进行综合。在极坐标下,滞后的目标方位角和高低角分别为

(1)

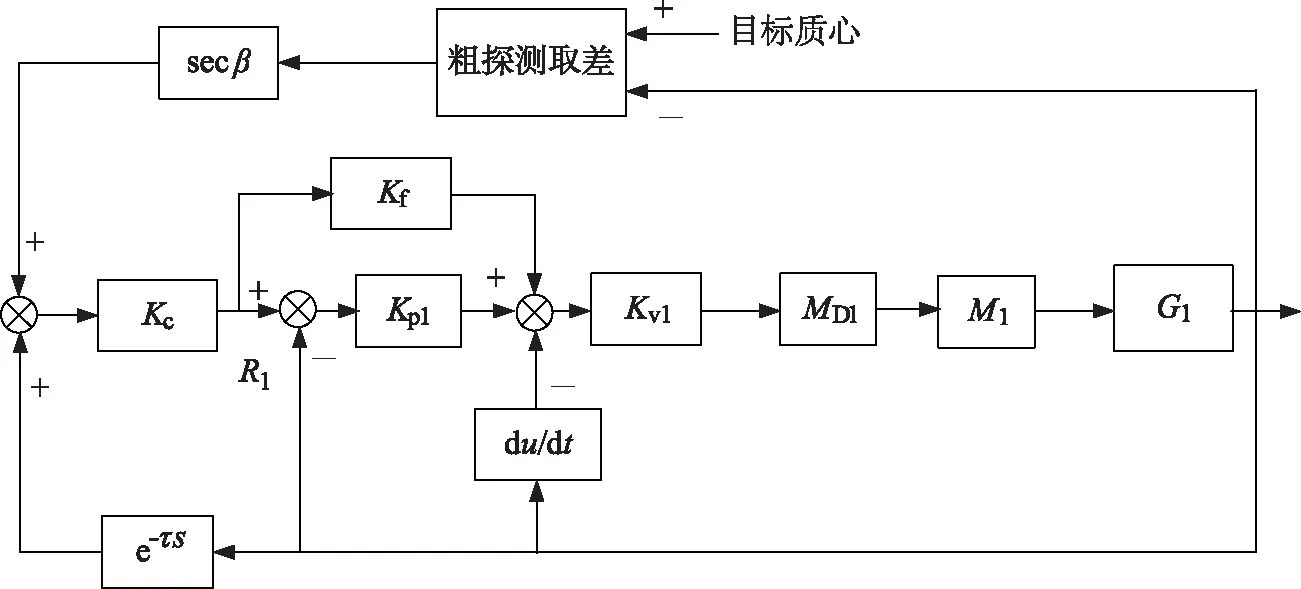
图2 粗跟踪控制系统Fig.2 Coarse tracking control system
1.2 精跟踪系统
如图1所示,精跟踪系统由发射望远镜、快速反射镜(fast steering mirror, FSM)、反射镜组等构成的探测光路以及精探测设备等组成。通过FSM可以实现跟瞄系统的小范围精密跟踪与瞄准。精跟踪系统在粗跟踪系统的基础上改变激光跟瞄系统的发射和跟踪光轴,其中,跟踪光轴包括方位和俯仰两个自由度。通过多组小范围运动的压电陶瓷(piezoelectric ceramic transducer,PZT)驱动的FSM,结合小视场可见光探测器实现高精度精密跟踪,每一组PZT控制原理相似。精探测光路相对于精探测设备产生方位和高低相对运动,导致精探测视场发生旋转,也称“像旋”现象。因此,需要将精探测的取差值经过旋转变换后才能作用到FSM中。“像旋”不是本文主要关心的问题,因此本文后续会省略精跟踪的“像旋”问题。
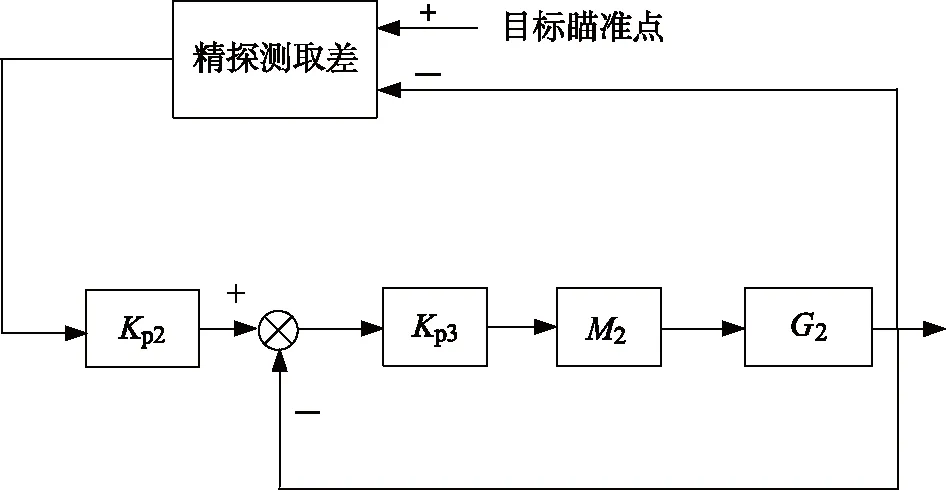
图3 精跟踪控制系统Fig.3 Fine tracking control system
精跟踪系统的控制结构与粗跟踪系统的控制结构相似,如图3所示。图3中:Kp2为精跟踪控制器,Kp3为包括位移反馈控制的PZT控制器,M2为压电陶瓷执行机构,G2为快反镜FSM。与粗跟踪系统相比,精探测设备的视场更小,图像帧频更高,作为运动执行机构的压电陶瓷具有上千赫兹的谐振频率,其滞回、蠕变等非线性特性已经得到了妥善的解决,因此可以保证精跟踪系统的响应速度更高,精度更高。除此之外,应该注意的是,精跟踪系统的探测视场具有小的景深,可以有效地抑制空中复杂背景的影响,换言之,精跟踪视场内的目标/背景对比度(信噪比)更高。若能将其与粗跟踪系统相结合,则能够很好地提高系统的抗干扰性能,后续章节将对此进行讨论。
1.3 复合轴跟踪控制系统
由粗跟踪系统和精跟踪系统组成复合轴跟踪控制系统,利用粗跟踪系统的大运动范围以及精跟踪系统的高动态响应特性和高精度来实现对目标区域或瞄准点的精确跟踪。以双探测器复合轴控制系统为例进行说明,激光跟瞄系统中的双探测器复合轴跟踪控制结构如图4所示,LOS1为粗探测轴的视轴指向,粗探测系统以此视轴方向与目标视轴重合为跟踪目标,视轴输出为YLOS1;LOS2为精探测轴的视轴指向,精探测系统以此视轴方向与目标视轴方向重合为跟踪目标,实现复合轴跟踪后系统总的视轴输出为YLOS2。图4中有以下几点需要说明:粗跟踪系统的目标截获以整个目标为特征进行图像跟踪,往往以目标图像的“质心”或者“形心”为图像跟踪依据;而精跟踪系统通常以目标瞄准点或打击特征点为图像跟踪依据,因此两者的跟踪特征是不同的。即使两者的视场中心点在跟踪前是重合的,在跟踪过程中,精跟踪系统相对于粗跟踪机构也会出现相对偏差。
在上述跟踪控制结构中,粗跟踪系统的控制相对独立,粗跟踪系统的控制稳定性由自身的稳定性决定。粗跟踪系统的输出相当于叠加在精跟踪系统中的“扰动量”,在精跟踪系统的视场范围内,精跟踪系统的控制稳定性只取决于精跟踪系统自身。但是,若粗跟踪系统引起的目标取差值过大,则会导致目标超出精探测系统的视场范围或PZT的行程范围,从而导致精跟踪系统无法正常工作。复合轴跟踪控制系统的稳定性取决于粗跟踪系统和精跟踪系统自身的稳定性,系统工作的稳定性取决于粗精复合轴跟踪系统的视场匹配和带宽匹配情况。复合轴跟踪控制系统的精度最终取决于精跟踪系统的取差值ef。
尽管复合轴控制系统被广泛应用,但在激光跟瞄系统的实际应用过程中,发现以下问题:当粗跟踪系统向精跟踪系统交班后,粗跟踪系统发生背景干扰或目标机动会导致目标丢失或目标跟踪点漂移。当目标在精跟踪视场中丢失,复合轴跟踪系统会退出精跟踪过程,粗跟踪系统需要重新捕获目标,精跟踪所有的作动机构直接“归零”,重新进行粗精交班控制。若粗跟踪的目标跟踪点发生漂移,则会出现精跟踪系统作动机构运动到极限位置或精跟踪视场不能捕获目标,无法实现复合轴跟踪控制。因此若粗精跟踪系统不进行协同控制,还是会发生粗精交班不稳定或粗精复合轴跟踪控制异常的现象。针对上述问题,将在第2章中给出一种粗精复合轴协同跟踪控制策略,实现两种工作模式的切换。
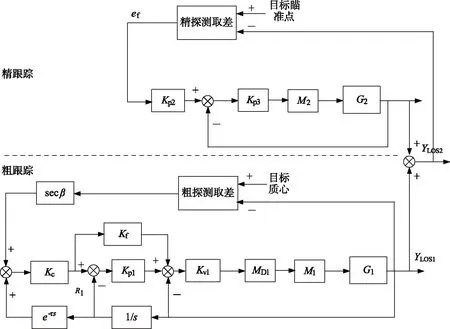
图4 双探测器粗精复合轴跟踪系统Fig.4 Dual detectors coarse-fine compound axis tracking system
2 粗精复合轴协同控制策略优化
2.1 粗精复合轴协同控制结构
在传统复合轴控制系统的基础上,在粗跟踪系统中增加两路协同控制信号和一路切换开关,一路是精探测设备的输出经过光学变换系数λ作用到粗跟踪回路上,另一路是精跟踪快反镜的输出信号经过变换系数作用在粗跟踪回路上,如图5所示。在目标捕获过程中,粗跟踪切换开关切到模式1,粗精跟踪相对独立运动,粗跟踪系统利用粗探测设备的取差信号进行粗跟踪;当粗跟踪精度满足要求时,目标出现在精跟踪系统的视场上,精跟踪系统经过对焦后,将提取目标特征瞄准点(瞄准区域),并进行精跟踪。在提取目标特征点后,粗跟踪系统的跟踪点与精跟踪系统的跟踪点不同,会导致FSM移动到接近极限的位置,影响精跟踪系统的扫描范围。此外,由于粗跟踪系统的视场较大,若粗探测设备发生背景干扰等,将导致目标在粗跟踪系统的视场中丢失,从而精跟踪系统会退出跟踪过程,进行“归零”操作。
粗跟踪系统需要重新开始进行目标捕获,系统的反应时间显著增长。此时,粗跟踪切换开关切到模式2,采用精跟踪引导粗跟踪的单探测器工作模式。在该工作模式中,粗跟踪系统将利用精跟踪得到的取差信息以及架位信息等综合目标信息进行粗跟踪。精跟踪系统的视场更小,分辨率高,景深小,目标背景对比度更好,因此有更好的抗干扰性能。若精跟踪系统发生目标瞄准点丢失的情况,则切换开关切换回模式1,重新进行粗跟踪,并进行粗精复合轴跟踪控制。粗精复合轴协同控制过程如图5。
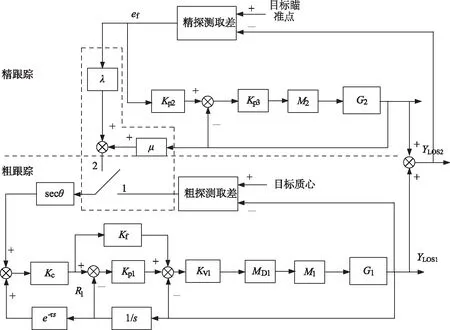
图5 粗精协同控制系统Fig.5 Coarse-fine compound axis cooperative control system
结合上面的控制策略,对系统的跟踪稳定性进行分析。当切换开关切换到模式1时,粗跟踪系统和精跟踪系统利用各自的探测器进行闭环跟踪控制,粗跟踪系统和精跟踪系统的稳定性是独立的,如第1章所述。当切换开关切换到模式2时,粗跟踪系统和精跟踪系统同时利用精跟踪系统探测器的信息进行闭环控制。此时复合轴跟踪控制结构等效为图6。图6中,为了便于描述,省略了实际工程应用中的共轴跟踪控制结构,Kp1仍为粗跟踪控制器,Kp2仍为精跟踪控制器,Gv1为粗跟踪系统的速度闭环控制系统,Gv2为精跟踪系统的位置闭环控制系统。当精跟踪系统丢失目标后,重新切换至模式1,粗跟踪系统重新进行引导,重新进行粗跟踪系统向精跟踪系统的交班,当满足交班条件后,切换开关切换到模式2。
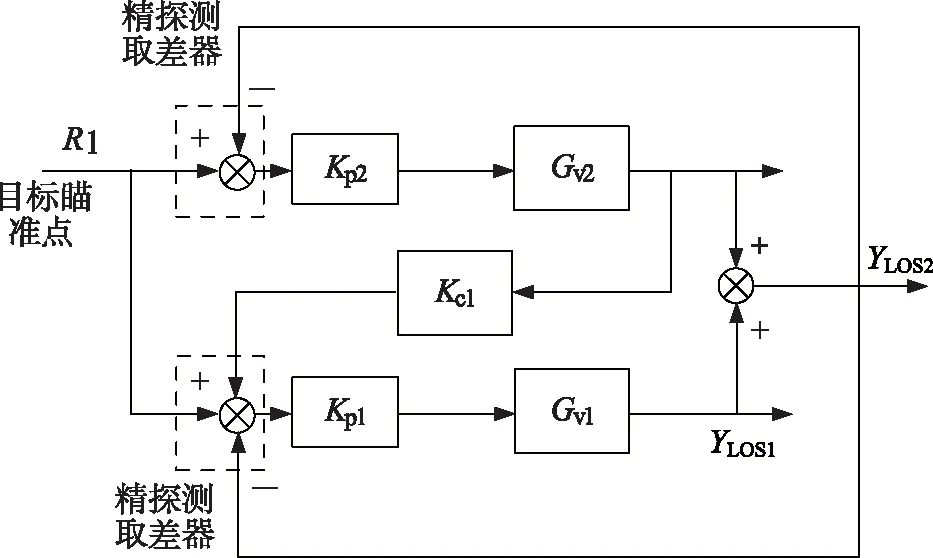
图6 粗精复合轴协同控制模式2结构框图Fig.6 Block diagram of compound axis cooperative control mode 2
2.2 粗精协同跟踪控制的稳定性
对粗精协同跟踪控制系统的稳定性进行简要分析。若将交叉解耦控制器Kc1忽略,则系统总的视轴输出Ylos2为
(2)
式中:R1为目标参考输入。
由式(2)可以得出以下结论:系统的稳定性由粗跟踪系统和精跟踪系统的稳定性决定,即如果粗跟踪和精跟踪系统都是稳定的,则粗精协同控制系统也是稳定的。当加入解耦控制器Kc1后,系统输出总的视轴输出Ylos2为
(3)
由式(3)可知,当Kc1=1时,粗精协同控制系统可以完全解耦。此时,精跟踪系统相对于粗跟踪系统的偏差值为
Ylos2-Ylos1=
(4)
尽管系统本身是稳定的,但由于精跟踪系统的带宽较宽,可以达到上百赫兹的响应频率,而粗跟踪系统的带宽较窄,因此精跟踪系统的输出容易激发粗跟踪系统的机械谐振,产生运动噪声。为了不激发粗跟踪系统的谐振频率,将Kc1设计成带比例增益的低通滤波器的形式,比例增益确保系统的稳定,并对粗精协同控制系统的相对运动行程有衰减作用,增大了精跟踪系统的可调整范围,低通滤波器的带宽介于粗跟踪系统和精跟踪系统的带宽之间。
3 仿真和实验结果
3.1 仿真结果
第2章给出了粗精复合轴协同控制优化策略,该控制策略可以在两种粗精复合轴控制模式下进行切换。通过仿真来验证激光跟瞄系统粗精复合轴跟踪控制方法的有效性。根据第2章中描述的方法得到粗跟踪系统的跟踪误差曲线,如图7所示。图7中,data1代表工作模式1下复合轴跟踪控制的仿真结果,data2代表工作模式2下复合轴跟踪控制的仿真结果。当复合轴跟踪控制从模式1切换到模式2时,粗跟踪系统的跟踪误差从0.9 mrad 减小到0.3 mrad。
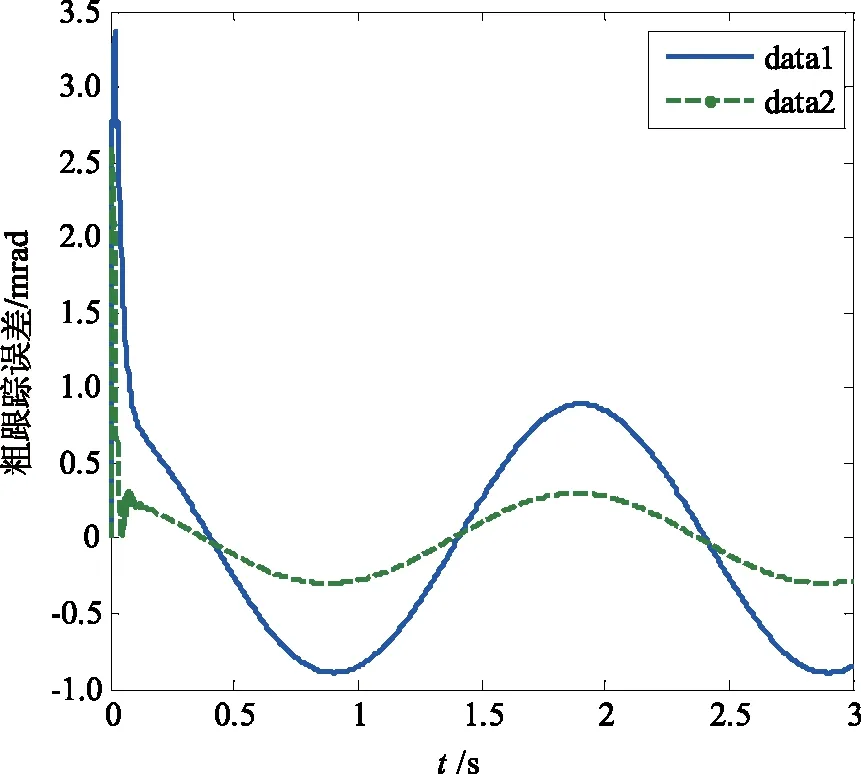
图7 粗跟踪控制误差Fig.7 Coarse tracking control error
图8中,data1给出了协同控制在工作模式1下精跟踪系统的跟踪误差;data2给出了协同控制在工作模式2下精跟踪系统的跟踪误差。在稳定跟踪过程中,当复合轴跟踪控制从工作模式1切换到工作模式2时,精跟踪系统的跟踪精度从3 μrad降低至1 μrad。
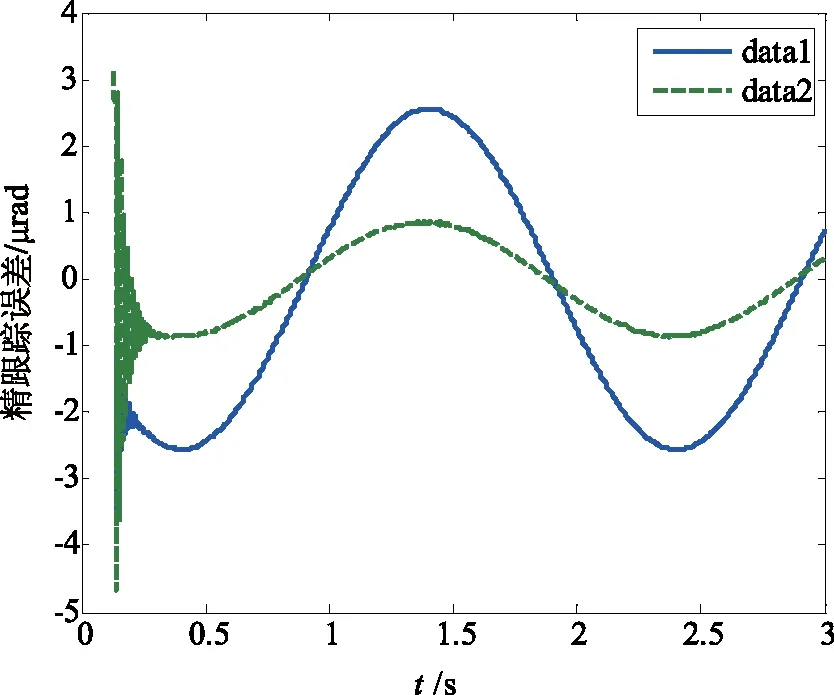
图8 精跟踪控制误差Fig.8 Fine tracking control error
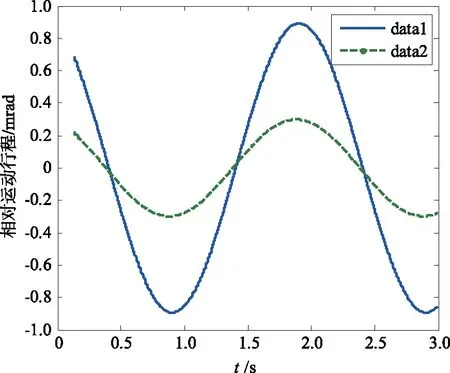
图9 精跟踪相对运动行程Fig.9 Relative motion distance of the fine tracking system
图9给出了精跟踪系统和粗跟踪系统相对运动位移,该位移代表了FSM的行程。FSM的有效行程小于1~2 mrad 。当复合轴协同跟踪控制从模式1切换至模式2时,精跟踪系统的相对运动行程从0.9 mrad 降低至0.3 mrad,这意味着精跟踪系统具有更大的可调整范围,提高了精跟踪系统的抗干扰性能。
3.2 实验结果
通过实验来验证激光跟瞄系统的粗精复合轴协同控制方法,实验系统的控制结构如图1所示,包含一个两自由度运动转台和两自由度运动FSM。两自由度运动转台具备方位360°、高低70°的运动行程,两自由度FSM的运动行程为毫弧度量级,相对应的是粗精跟踪系统具有不同视场范围、不同分辨率的图像跟踪设备。在实验过程中,将无人机作为典型的跟踪目标。
激光跟瞄系统的跟踪图像如图10~11所示,粗精跟踪系统有不同的瞄准点或瞄准区域。图10给出了粗跟踪系统的跟踪图像,为点目标跟踪,跟踪点为无人机的图像质心;图11给出了精跟踪系统的跟踪图像,为面目标跟踪,跟踪区域为无人机尾部机翼。当粗精复合轴协同控制处于模式1时,为双探测器跟踪模式,粗跟踪系统利用粗跟踪探测器捕获目标。当目标进入精跟踪探测器(此时粗跟踪偏差小于1 mrad)时,选择目标特征区域,进行粗精复合轴跟踪控制(此时精跟踪偏差小于10 μrad),将跟踪控制模式切换至工作模式2。在工作模式2中,粗跟踪系统利用精跟踪的综合目标信息进行跟踪。精跟踪的目标综合信息能够抑制背景的影响,克服粗跟踪系统抗干扰能力差的缺陷,即使粗跟踪系统丢失目标,仍然能够完成有效的跟踪,保证精跟踪的特征跟踪区域位于精跟踪的视场中心。在工作模式2中,精跟踪系统引导粗跟踪系统进行跟踪,为单探测器工作模式,在实验过程中得到了充分的验证。

图10 粗跟踪图像Fig.10 The coarse tracking image
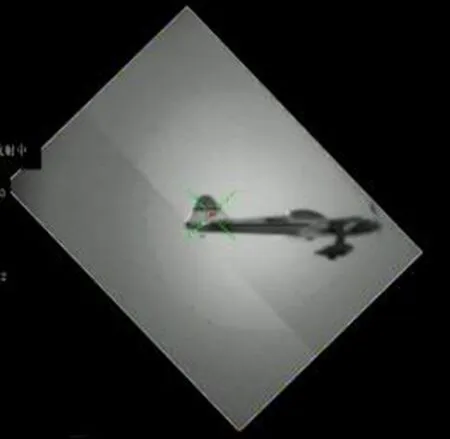
图11 精跟踪图像Fig.11 The fine tracking image
4 结束语
为了保证激光跟瞄系统的跟踪精度、响应速度和抗干扰性能,引入粗精复合轴协同控制策略,使粗精复合轴跟踪控制在两种工作模式下进行切换。一种工作模式为双探测器粗精复合轴跟踪控制,此时粗精复合轴运动相对独立;另一种为单探测器复合轴跟踪控制,引入解耦控制器,此时精跟踪系统引导粗跟踪系统进行粗精复合轴跟踪控制。不同工作模式的切换充分利用了精跟踪系统的快速运动响应、高分辨率以及粗跟踪系统大运动行程的优点。仿真和实验结果验证了方法的有效性。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
现代仪器与医疗(2022年1期)2022-04-19
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
科学与财富(2018年28期)2018-11-16
航空知识(2017年4期)2017-06-30
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
