Hermite分数时延滤波器在声纳信号源仿真逆波束形成中的应用
2019-08-22 03:13:22王乐宁喻敏姚直象张晓亮
兵工学报 2019年7期
王乐宁, 喻敏, 姚直象, 张晓亮
(1.武汉理工大学 交通学院, 湖北 武汉 430063; 2.海军工程大学 电子工程学院, 湖北 武汉 430033; 3.中国船舶工业系统工程研究院, 北京 100036)
0 引言
水下信号处理算法研究一直是水声工程学者研究的热点,但由于水下实测数据在水声目标噪声和海洋环境噪声等因素的影响下离散性大,并且试验过程耗时长、成本高,并不适合直接用于新算法、新技术的初步测试和可行性检测。而且各国的真实目标数据保密等级高,不易获得,现有数据也很难取得包含可变信号形式的不同目标在整个模式空间内的全部样本,所以水下信号源仿真不仅是水声技术的仿真基础,也是关乎水下探测技术和水下对抗技术发展的重点问题和热点问题。
从信号源仿真原理上看,阵元信号仿真的过程可以看成是波束形成的逆过程。传统的声纳阵列信号波束形成处理方式可分为两种,即频域和时域波束形成。相对于时域波束形成,频域法易使用于多波束形成,但由于现在主流的频率分解方法不能完全消除子带对阵列流型矢量的影响,并且波束主轴指向的信号特性不随频率变化,波束主瓣宽度内非主轴的其他指向信号会有能量损失,且信号带宽越大、偏离主轴越远,会引起波束偏移和失真[1-2]。时域波束形成是对时域信号进行实时补偿的方法,消除了波束偏移的问题。并且对于宽带信号频域波束形成需要将时域信号变换到频域,划分成子窄带后进行窄带相移波束形成。整个过程要保证声纳测向的高分辨率,将会引起计算量大、所需储存空间多的缺点,相较之下时域直接延时补偿法更适合宽带阵列信号处理,因此信号源仿真采用对基元信号的精确时延即直接时延法来实现。
直接时延法的核心是对各个方向接收的阵列信号进行精确延时补偿以保证快速准确地搜索定位,但现有的模拟/数字(A/D)采样速率是有限的,不可能无限高,因此阵列信号的延时精度受到限制。传统提高时间精度的方法可以分为模拟和数字两类,但模拟延时线成本高,体积庞大且稳定度不高。相比之下,以分数延时技术为代表的数字延迟法结构简单,更易于实现[3]。传统的分数时延滤波器(如最小二乘法分数时延滤波器、Lagrange插值滤波器)的幅频特性与群时延特性在信号高频段性能恶化,因而导致波束形成中信号高频部分衰减失真变大,数字波束形成的增益下降[4]。Soontornwong等[5]给出了后向差分、2阶中央差分和4阶中央差分近似的3阶Hermite滤波器的幅频响应和群延时响应,但阶数较小,相应的分数延时量也较小。Tseng等[6]验证了Hermite高阶分数时延滤波器的可行性。随后,杜强等[1]采用Hermite滤波器对超宽带(USB)雷达时延波束形成的性能优化,但仅考虑了单一延时量的分析。
基于以上研究现状,本文提出了Hermite可变分数时延滤波器,即将Hermite滤波器和Farrow型设计相结合组成可变分数时延滤波器用于精确延时,应用到声纳直接时延法信号仿真中,并对阵列信号源进行频域波束形成验证,以证明Hermite分数时延滤波器在信号直接时延仿真时衰减少、性能好的特点。
1 分数时延滤波器
在模拟信号处理中,理想的分数时延滤波器的信号输入x(t)和输出y(t),需满足y(t)=x(t-tD),其中tD为延时量。只要设计单位冲激响应逼近于h(t)=x(t-tD)的线性系统就可以实现。但在数字系统中,对连续时间信号进行采样可以得到y(n)=x(n-D),其中n为采样点数,D=int {D}+d,int{D}表示时延量D的整数部分,d表示时延量D的小数部分。从时域角度分析连续可变的时延可以通过设计逼近hd(n)=sinc(n-D)的单位脉冲响应函数来实现,从频域角度分析,设计的分数滤波器要满足系统响应[7]为
(1)
|H(ejω)|=1,arg{H(ejω)}=-Dω,
(2)
式中:X(ejω)和Y(ejω)分别为x(n)和y(n)的离散时间傅里叶变换;ω=2πf,f为信号频率。可以得到其群延迟τg和相位延迟τp分别为
(3)
两种延迟都能描述系统的时延,对于线性系统或者逼近线性系统来说,群延迟和相位延迟都是一条平坦的曲线,且(3)式在整个归一化频率范围内都是常数D[8],本文通过逼近理想相位延迟曲线,来设计分数时延滤波器。
1.1 Hermite分数时延滤波器
Hermite分数时延滤波器是基于Hermite插值多项式近似的时延滤波器。其原理如下:已知N+1个不同的点(t0,x(t0)),(t1,x(t1)),…,(tN,x(tN))和其1阶导数(t0,x′(t0)),(t1,x′(t1)),…,(tN,x′(tN)),则有Hermite插值多项式:
(4)
其满足于H2N+1(tk)=x(tk)和H′2N+1(tk)=x′(tk),且H2N+1(t)≈x(t),t∈[n-N,n].
令tk=n-k,k∈[0,N],则(4)式可变换为
(5)
根据文献[5-6],(5)式需满足

(6)
对(6)式左右两边进行离散傅里叶变换:
(7)
两边同时除以X(ejωD),得
(8)
由(8)式可知,理想时延滤波器的系统响应G(ejωD)可由Hermite插值多项式近似得到,即
G(ejωD)=G1(ejωk)+jωG2(ejωk),
(9)

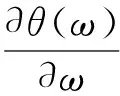
此时,进行Z变换z=ejω,Hermite分数时延滤波器可以基于两个有限冲激响应(FIR)滤波器和一个微分器进行设计,两个滤波器分别为G1型FIR滤波器和G2型FIR滤波器:
式中:g1(k)和g2(k)为两个滤波器的系数,且满足
(10)
根据上述原理,搭建成的Hermite分数时延滤波器框架如图1所示。
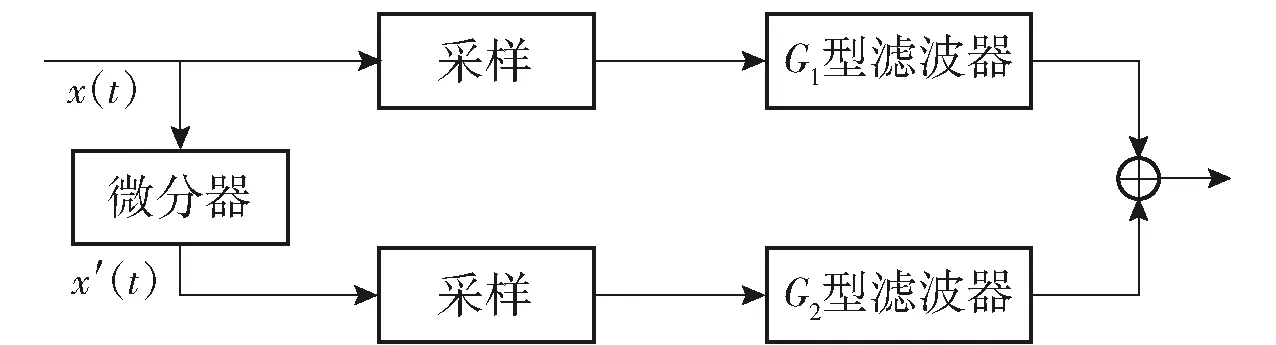
图1 Hermite分数时延滤波器实现框架Fig.1 Framework of Hermite fractional delay filter
对于单波束形成而言,此类时域波束形成相较于传统的频域波束,其计算复杂度会大大降低。这是因为对于N点信号划分为B个子带时,其K点的傅里叶变换的复乘次数为(NB/2)log2K,划分子带时L阶多相滤波器组处理复乘次数为(L+1)N/2. 而对于Hermite分数时延滤波器,仅有两个L阶G1型和G2型滤波器以及一个微分器组成。对于G1和G2型滤波器的复乘次数为(L+1)N,传统的微分器也可以用线性相位FIR滤波器或无限冲激响应(IIR)滤波器法。相较之下傅里叶变换的复乘次数,Hermite时延滤波器计算复杂度较低。
1.2 Farrow型Hermite延时滤波器
经典的Farrow结构由M组2N+1阶直接型 FIR滤波器以及M-1个分数时延乘法器组成[9]。设计Farrow型的目的是将分数时延量D独立于具体的滤波器系数,使得时延改变时,系统不需重新加载滤波器系数,避免了大量系数的存储,同时时延精度改变时只需改变送入的时延D精度即可[10]。为了实现可变分数Hermite滤波器的设计,将Farrow型结构的设计原理引入Hermite滤波器。
(11)
式中:Am(ejω)和Bm(ejω)分别是am(k)和bm(k)的离散傅里叶变换。此时,进行Z变换z=ejω,得到数字信号滤波器的设计方案,即
因此,Hermite分数时延滤波器可以设计为延时量独立的Farrow型滤波器,其框架为图2所示。
图2 Farrow型Hermite分数时延滤波器框架Fig.2 Framework of Farrow-type Hermite fractional time delay filter
2 直接时延补偿逆波束形成
阵列信号源仿真一般基于波束形成的逆过程,本文采用直接时延补偿逆波束形成进行信号源仿真。直接时延补偿波束形成是将阵元接收信号相对参考阵元进行精确时延补偿,使接收阵列在来波方向接收能量最大,从而确定来波方向[11-12]。其中精确延时通过采样间隔的整数倍延迟和分数时延滤波器延迟两部分实现。本文着重研究Hermite分数时延滤波器相对传统Lagrange分数时延滤波器的优化性问题,故采用此两类滤波器进行精确延时。图3为基于Hermite分数时延滤波器的直接延时补偿波束形成的实现框图,各阵元信号是将参考信号分成两路进行处理:一路直接通过A/D转换,经过粗延时即整数延时再经G1型FIR数字滤波器;另一路先通过模拟微分滤波器进行微分后,再经过粗延时和G2型FIR数字滤波器,将两路信号叠加即完成了该路信号的时延过程。
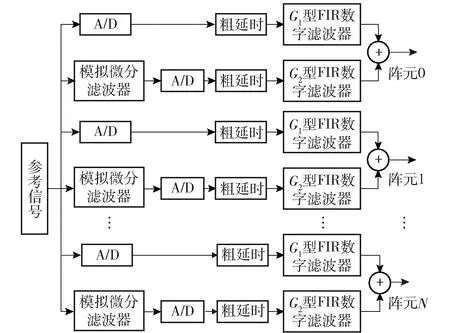
图3 直接延时补偿逆波束形成的实现框图Fig.3 Framework of direct delay compensation inverse beamforming
3 仿真分析
3.1 分数延时插值滤波器频响特性分析
本文对16阶的复频响应法、切比雪夫加窗法、Lagrange插值法和Hermite插值法设计的FIR滤波器进行实验仿真,以滤波器频率响应的均方误差作为判断准则,分析各个滤波器的优缺性。图4~图7分别展示了复频响应法、切比雪夫加窗法、Lagrange插值法和Hermite插值法分数时延滤波器的频率响应。可以明显地看出,Hermite分数时延滤波器在整个频域范围内即归一化角频率带宽为[0,π],其幅频响应和相频响应都是最为逼近理想分数时延滤波器的,此类滤波器的效果最佳。
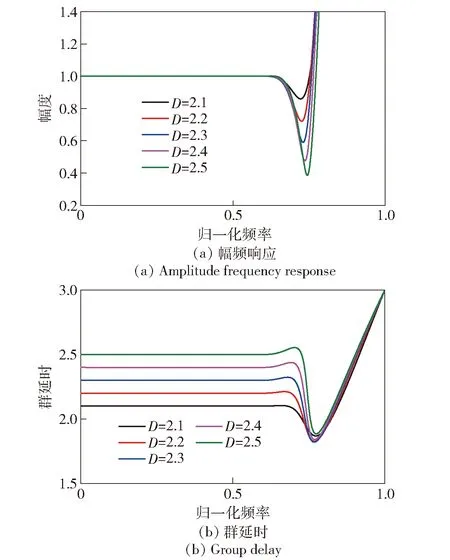
图4 复频响应法的分数时延滤波器频率响应Fig.4 Frequency response of fractional delay filter with complex frequency response method
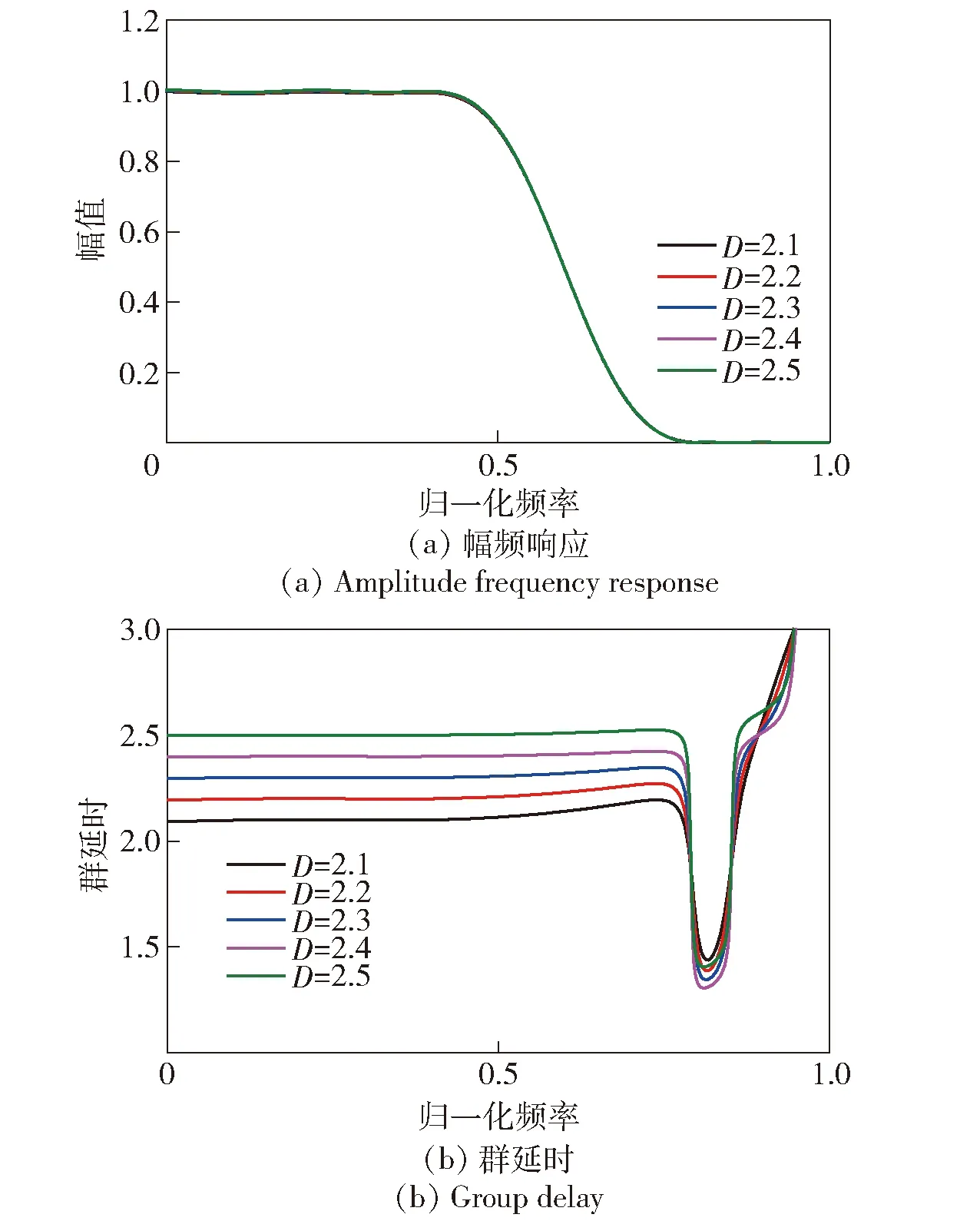
图5 切比雪夫法的分数时延滤波器频率响应Fig.5 Frequency response of fractional delay filter with Chebyshev method
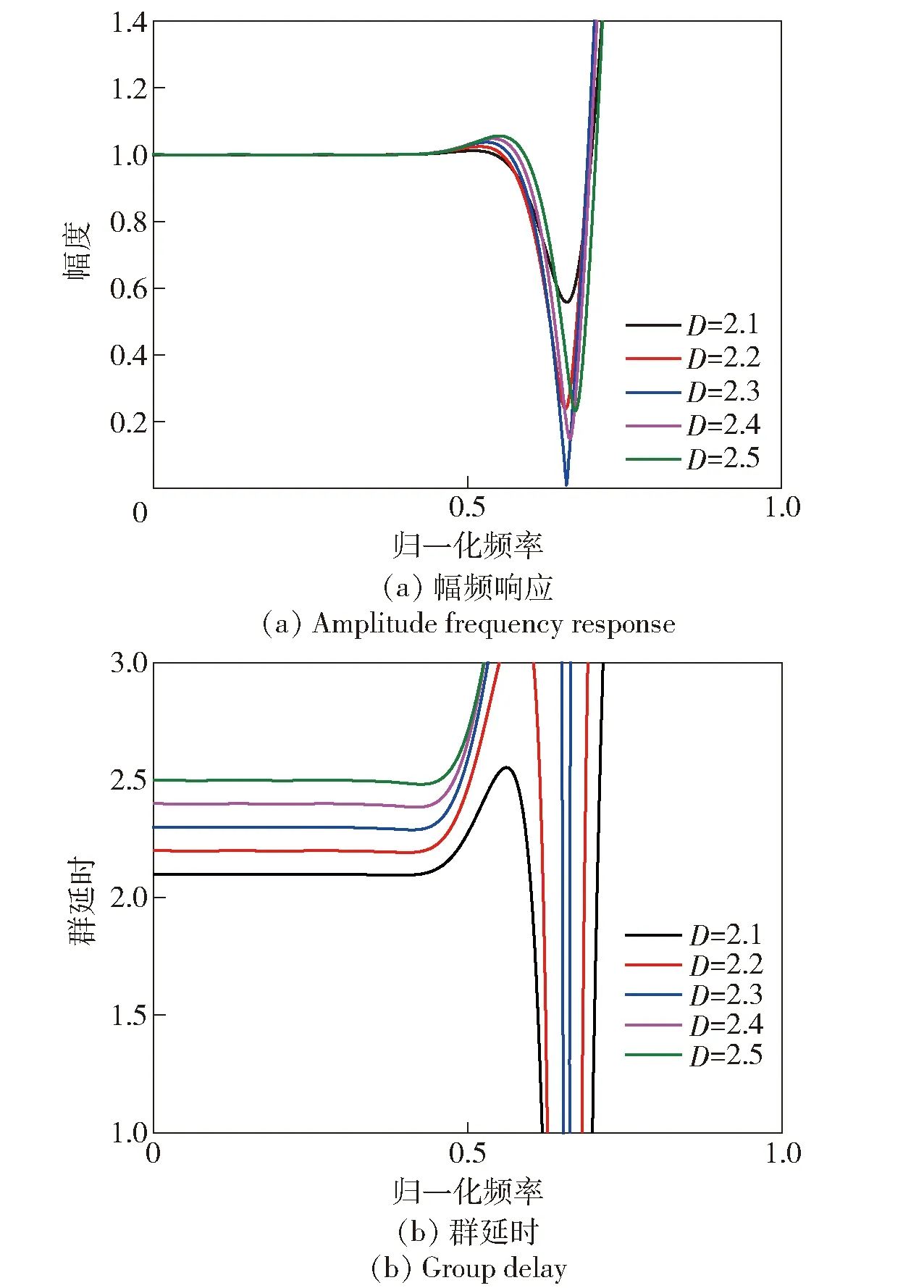
图6 Lagrange分数时延滤波器频率响应Fig.6 Frequency response of Lagrange fractional delay filter
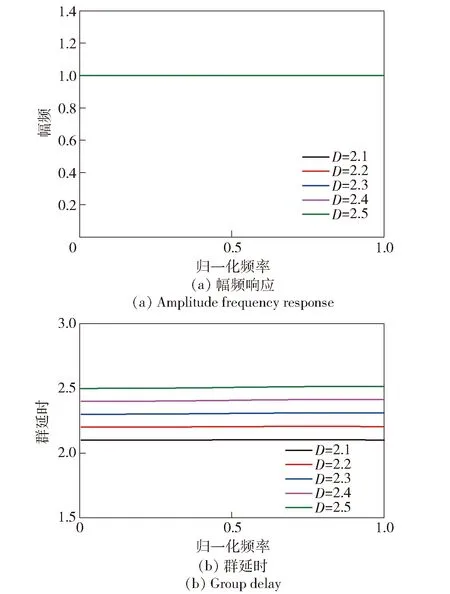
图7 Hermite分数时延滤波器频率响应Fig.7 Frequency response of Hermite fractional delay filter

在其他3种滤波器之中,复频响应法的频率响应是最为逼近理想分数时延滤波器的,此滤波器在延时量D=2.4,频段[0,0.6π]范围内均方误差仅为1.74%. 但是此方法计算复杂,还可能会遇到矩阵计算中的病态问题,在实际工程中应用并不广泛。与此相比,Lagrange分数时延滤波器只能保证在[0,0.4π]范围内满足分数时延滤波器的设计要求,其均方误差为0.93%. 切比雪夫分数时延滤波器的频率响应只能在带宽[0,0.4π]内保持较为理想的特性,此频率范围的均方误差为1.02%,并且影响此滤波器的因素还包括主旁瓣高度差等。各滤波器在不同频率范围内的均方误差如表1所示。
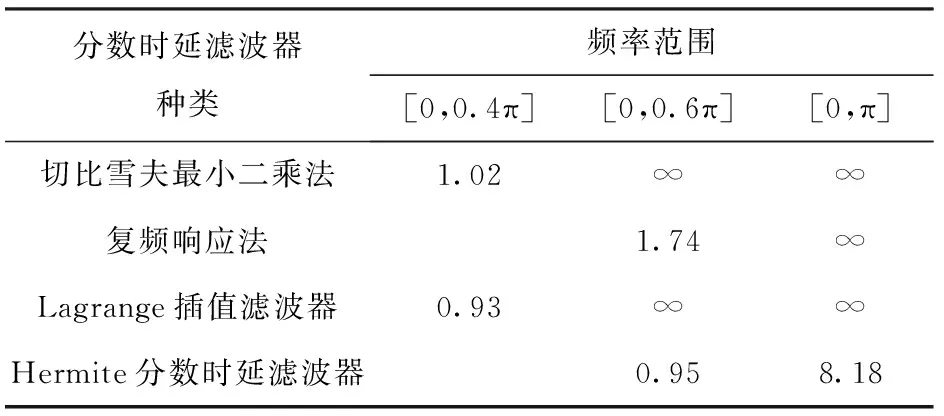
表1 不同频率范围内各滤波器均方误差
本文在保证均方误差最小的前提下,选择适应带宽尽可能高的滤波器。综合上述分析,Lagrange分数时延滤波器的运算量和影响因素相对较少,且在一定带宽内均方误差最小。Hermite分数时延滤波器虽然设计复杂度相对较高,但是在高带宽内保证了最小的均方误差。所以本文将采用这两种方法对各基元信号进行精确延时,从而完成阵元声压信号的仿真,并在下文中进行波束形成处理,以验证Hermite分数时延滤波器的正确性和优化性。
3.2 波束形成验证
假设目标声源处于远场,信号发射形式为窄带CW信号和线性调频LFM信号,信号帧长为1 s,脉冲重复周期为0.2 s,脉宽为0.05 s,窄带信号的初始位置方位角θ为30°,中心频率为1 kHz. 宽带信号的方位角为60°,中心频率为2 kHz,带宽为2 kHz. 接收基阵为线性阵列,基阵数目为16,基阵间距为0.5 m. 将产生的窄带信号和宽带信号分别波束形成,图8为窄带信号的波束形成图,图9为宽带LFM信号的宽带频域波束形成图。

图8 窄带信号的相移波束形成图Fig.8 Phase-shifting beamforming diagram of narrow band signals
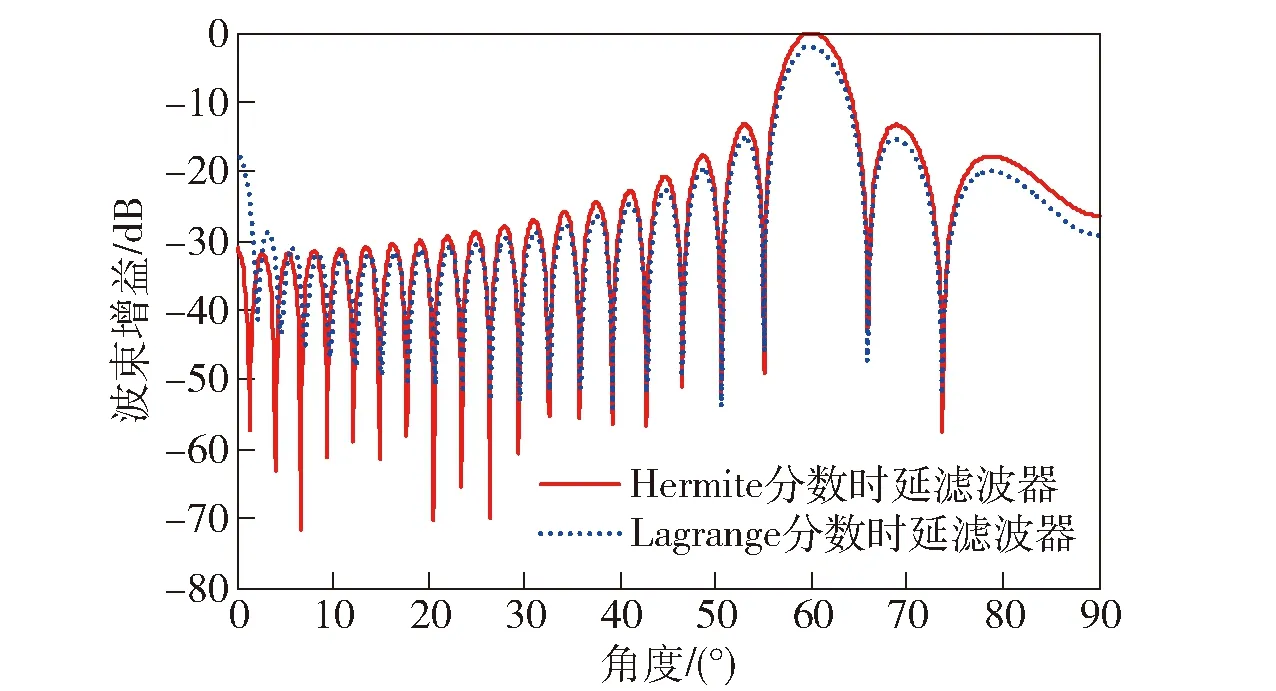
图9 宽带LFM信号的宽带频域波束形成图Fig.9 Frequency domain beamforming diagram of wideband LFM signals
首先,由图8~图9可知,Hermite分数时延滤波器延时模式的信号源仿真信号正确估算出了声源的方位,可以达到波束形成所需的精确时延精度。其次,由图8可知,Hermite滤波器延时的信号波束形成处理产生的波束图主瓣宽度相较Lagrange滤波器会窄一些,旁瓣电平数会相对较小。由图9可知,Lagrange分数时延滤波器所产生信号经过能量叠加后,相对Hermite分数时延滤波器所产生的信号能量有近3.8 dB的损失。这是因为Hermite分数滤波器适用带宽比较大,信号高频段经过滤波器后衰减较小,而Lagrange分数时延滤波器的适用带宽比较窄,可能会使信号高频段发生衰减。综上所述,Hermite分数时延滤波器不仅能完成阵元声压信号的高精度延时,而且可以在较宽频带内保持分数时延滤波器的特性。
4 实验验证
为了验证Hermite分数时延滤波器算法的有效性,在消声水池进行两个阵元间时延估计试验。阵元个数为2,间距是0.4 m,声源距离阵元5 m,通过几何关系计算得到阵元间的信号延迟为0.006 2 ms,采样率为108 kHz,故两路数字采样信号之间的信号延迟为0.67个采样间隔,将信号进行滤波,门限判断后得到可用实测数据,图10为两阵元间的实测数据。利用Hermite分数时延滤波器以第1路信号为基准进行分数时延,得到第2路仿真数据,对比实测数据验证分数时延的正确性。图11为信号仿真数据和实测数据的对比图。
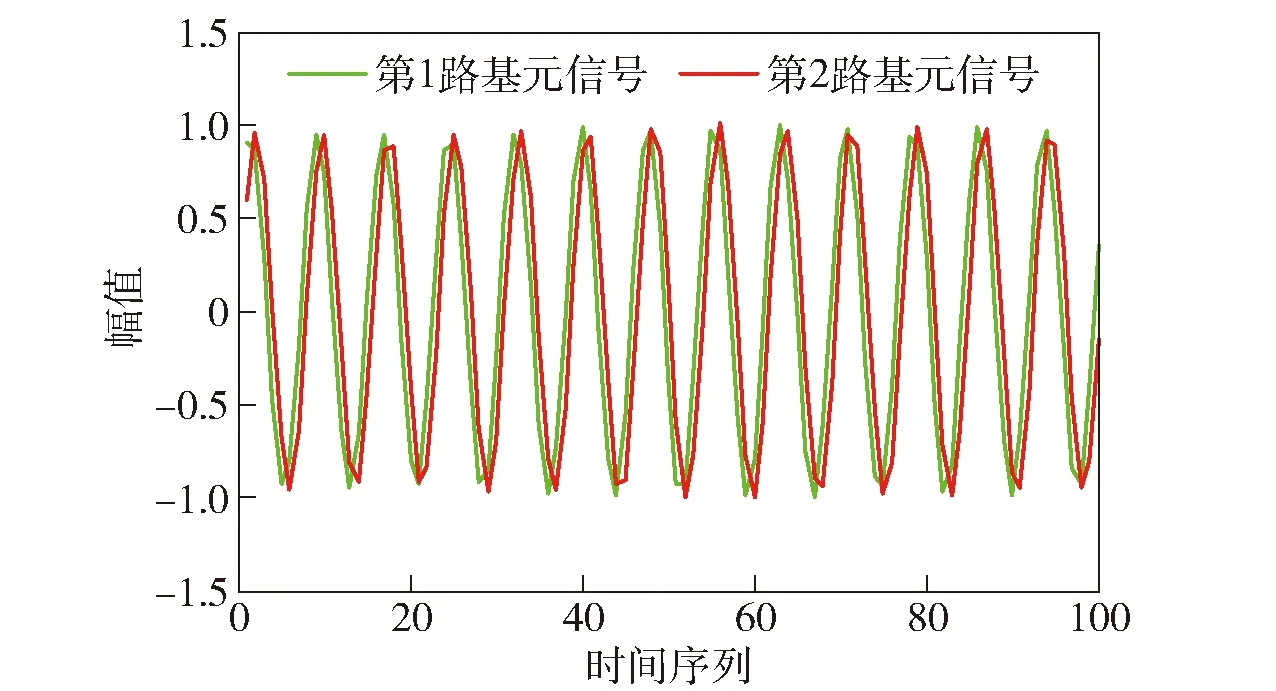
图10 基元接收的实测信号Fig.10 Measured signals received by the elements
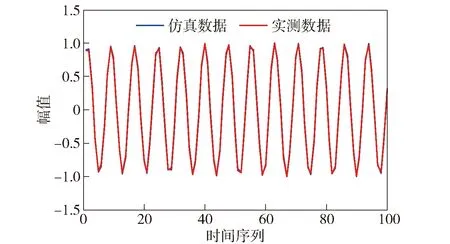
图11 仿真数据和实测数据对比图Fig.11 Comparison of simulated and measured data
为了衡量仿真误差,本文采用均方根误差作为衡量标准,信号采样帧长为40 ms,帧数为10帧,其均方根误差如表2所示。通过实验可以得出,Hermite分数时延滤波器的均方误差在0.97%左右,证明了Hermite滤波器的分数延时的可行性。
5 结论
本文将Farrow型Hermite分数时延滤波器应用到声纳信号源仿真中,通过与现有时延滤波器的性能比较、波束形成验证以及仿真与试验数据的误差分析,得出以下结论:
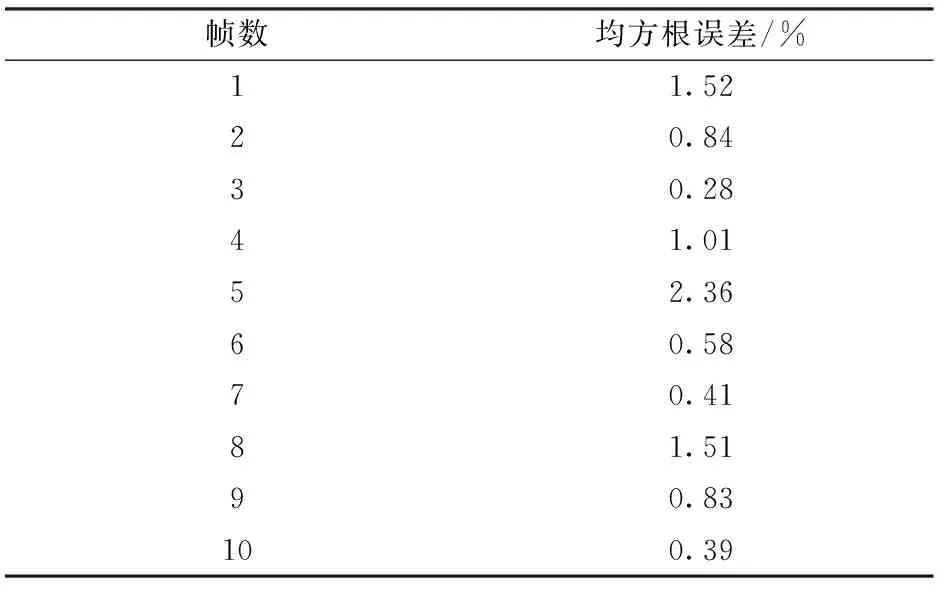
表2 Hermite分数时延滤波器仿真数据与实测数据的均方根误差
1)Hermite分数时延滤波的幅频特性与群时延特性在信号高频段性能较好,在整个归一化频带内的均方误差较小,表明了此方法在高带宽信号时延时的优势。
2)基于Hermite分数时延滤波器的窄带波束图主瓣宽度稍窄,旁瓣电平较低;宽带波束图的主瓣也接收了更多的信号能量。
3)通过对比实测数据,测得Hermite分数时延滤波器时延信号具有较小的均方误差,验证了此方法的有效性。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
今日中国·法文版(2020年7期)2020-07-04 02:53:48
雷达学报(2018年3期)2018-07-18 02:41:34
家庭影院技术(2017年9期)2017-09-26 03:41:22
电测与仪表(2016年8期)2016-04-15 00:30:16
火控雷达技术(2016年1期)2016-02-06 02:17:55
西部广播电视(2015年5期)2016-01-16 03:45:08
无线电通信技术(2015年3期)2015-12-23 11:37:02
电力建设(2015年2期)2015-07-12 14:15:59
电测与仪表(2015年8期)2015-04-09 11:50:18