基于高光谱图像探测与感知的伪装效果评估方法
2019-08-28 01:34:36马世欣刘春桐李洪才王浩何祯鑫
兵工学报 2019年7期
马世欣, 刘春桐, 李洪才, 王浩, 何祯鑫
(火箭军工程大学 导弹工程学院, 陕西 西安 710025)
0 引言
高光谱探测技术引发了遥感领域的一场革命,以高光谱技术为支撑的新型军事侦察手段给传统的伪装方法带来了前所未有的挑战[1-3],材料工程等领域开始重视反光谱侦察的研究,以合成高分子为主的新型材料开始用于涂料、伪装网等伪装手段[4-5]。伪装在一定程度上就是模仿背景某些属性的一种反侦察手段,通过这种隐真示假的方式以提高军事目标的战场生存能力。高光谱的侦察必然是近乎覆盖可见光和近红外的全波段侦察,研究全波段的伪装技术将变得更有意义[6]。
另一方面,考虑针对不同波段的伪装手段,纳米级的光谱分辨率对于伪装效果评估必然更加精细和全面。传统的伪装效果评价方法是由光学图像伪装评价方法发展而来,常见的如发现概率法、纹理特征、亮度对比、外形尺寸以及多指标综合评判方法(模糊评价、层次分析、神经网络等)、基于数学算法的评价方法等[7-9]。这些方法的优点是客观和量化,能够反映背景与目标的融合属性,但是仍然只是局限于单波段或多波段的侦察手段(如可见光、激光、红外、雷达、声波、多光谱等),对于具有精细波谱的高光谱侦察来讲,这些评价方法难以反映伪装目标的抗高光谱侦察的伪装效果,随着战场侦察手段发展的多元化,传统的伪装评价方法难以对目标隐身性能和战场生存能力给出全面定量准确的评价,因此将高光谱手段引入伪装效果评价体系将具有极其重要的现实意义[10-11]。
近些年来,视觉注意模型被广泛应用于目标探测[12]、目标跟踪[13]、特征提取[14]等诸多领域,通过这种高效的心理反馈机制,能迅速找到与背景差异较大的目标,实现注意力的优化分配[15]。类似于机器视觉的人眼感知系统,利用计算机模拟“图像- 人眼- 大脑”的反馈过程,将注意选择中的“目标驱动”和“知识认知”应用于伪装目标的显著性度量,对于伪装效果评估具有重要意义。
不同于传统基于多特征描述的伪装评价方法,本文从目标探测与视觉感知的角度,提出了一种基于探测和感知的高光谱伪装效果评估新方法。在对图像进行局部异常探测并进行阈值分割的基础上,采用空间密度聚类(DBSCAN)和邻域融合算法得到潜在目标区域;对潜在目标区域排序,建立反映目标伪装效果的显著性指标,并提出了基于有限时间搜索策略的伪装效果综合评价方法。该方法可以反映目标与背景的局部差异性,通过模拟人眼判别机制,对潜在目标区域的显著性排序,得到不同程度伪装下目标的识别概率,定量地描述伪装效果的优劣。实验表明,与传统评价方法相比,这种多指标多角度的评价方法更为全面客观,且模拟人眼注意系统的评价方式对于高光谱伪装效果评估具有更可靠的应用价值。
1 基于探测感知的目标伪装效果评估
国防工业上伪装设计的目的,就是通过减少目标与背景的差异性,使观察者更难发现目标[7]。从这一角度出发,可以使用目标探测的评价指标来定量评估伪装效果。而高光谱异常目标检测作为一种无先验信息的目标探测算法,本质上就是通过目标与背景的光谱差异性来发现目标[16]。因此,异常探测的结果可以更为直观地反映目标的伪装能力。
图1为伪装效果评估的流程图,主要包含两步:1)对异常探测结果聚类融合发现潜在目标区域;2)构造反映潜在区域目标伪装效果的特征指标。
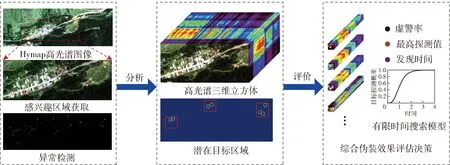
图1 基于探测与感知的伪装效果评估流程图Fig.1 Flow chart of camouflage effect evaluation based on detection and perception
1.1 分割潜在目标区域
在未知目标与背景光谱等任何先验信息的条件下,高光谱异常目标探测算法可以准确区别与背景差异较大的目标像元,但是,这种探测也只是停留在像元级或亚像元级,造成的探测结果往往是不连续的[17]。而对于空间探测的高光谱图像来讲,目标往往是由连续的几个像元构成,所以,探测面积是发现伪装目标并进行伪装效果评估的一项重要指标[18]。
同时,伪装效果评估的对象是潜在目标区域,相邻像元的合并和潜在目标区域的分割对于实施评估具有重要意义。因此,本节通过聚类融合算法实现探测结果的合并,对区域特征明显的潜在对象进行区域分割。图2为区域分割的流程图,图中RX为Reed-Xiaoli.
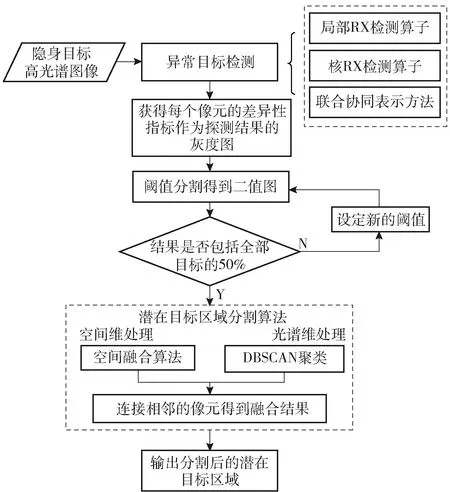
图2 潜在目标区域分割流程图Fig.2 Flow chart of potential target area segmentation
1.1.1 异常探测算法
异常探测算法在未知任何先验信息的条件下,可以找到与背景具有显著差异的异常目标,最为经典的为1992年Reed等提出的RX异常检测算法。RX算法是一种基于广义似然比检验的恒虚警异常探测算法,通过求取待测像元光谱与背景像元光谱的马氏距离实现异常目标的检测。RX算法的探测表达式为
(1)
式中:x为待检测像元的光谱向量;0为背景均值向量的估计值;0为背景协方差矩阵;η为设定的阈值;H1和H0为异常目标是否存在的二元假设。
实际实验中,选取了探测结果相对较好的局部RX(LRX)[19]、局部核RX(KRX)[20]、局部联合协同表示(CRD)[21]3种异常探测算法。
1.1.2 光谱聚类分析
对于较为离散化的异常探测结果,目标点的分布往往呈现出“簇分割”的特点,具有明显的聚类特性。在不了解类别等先验信息的前提下,可以利用目标的光谱相似性进行聚类分析。
聚类算法中最为常见的是k-means动态聚类算法,由于聚类中心的随机性和聚类个数的不确定性,算法的实现结果不稳定。而近几年,密度聚类算法在聚类效果上表现出强大的优势,最典型的是DBSCAN算法[22]。
DBSCAN算法可以实现任意形状的空间聚类,且针对噪声点的处理具有独特的优势。该方法只需要设定最小邻域半径和邻域点个数寻找分类簇,自适应地根据数据特点划分聚类个数,非常适合密度特性明显且无先验的高光谱聚类。DBSCAN算法的流程图如图3所示。
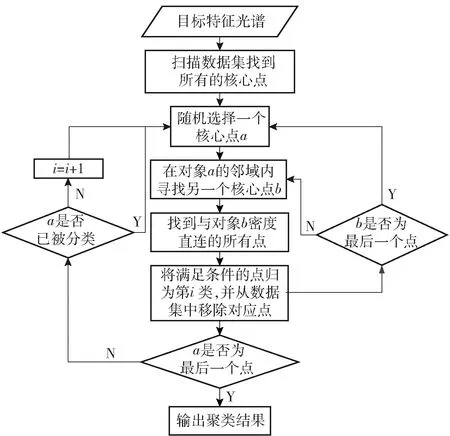
图3 DBSCAN算法流程Fig.3 Flow chart of DBSCAN algorithm
定义对象a和对象b为数据集S中的任意两点,则对象a的近邻可以表示为
Nc(a)={b∈S|dist(a,b)≤Rc},
(2)
式中:dist(a,b)为对象a与对象b距离;Rc为邻域半径。
如果对象a的近邻个数大于最小近邻个数Nmin,则称对象a为核心点;如果对象b在对象a的邻域内,且对象a的近邻个数大于Nmin,则称对象a和对象b密度直连,即
(3)
DBSCAN算法的核心思想可以归结为,在给定Rc和Nmin的前提下,从核心点出发寻找满足密度直连条件的所有点,聚类成簇。
1.1.3 空间融合算法
实际目标在空间像元分布中呈现连续性,但是,异常目标探测算法得到的结果与真实地物有一定的偏差,往往不能代表真实地物的全部像元。因此,在光谱聚类结果的基础上,需要划分各个目标集群,并设定潜在目标区域的邻域半径为R,对各个目标集群范围内的像元进行重新聚类。之后,再连接具有较强光谱相似性的像元,构成目标区域的块状连接,从而分割得到接近真实地物的潜在目标区域。图4为空间融合算法的示意图。
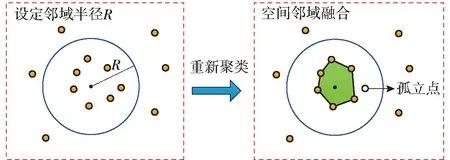
图4 空间融合算法示意图Fig.4 Schematic diagram of spatial fusion algorithm
1.2 建立伪装评估指标
从探测角度来看,潜在目标区域是观察者感知伪装目标的重点。所谓的“感知”,就是通过引起人眼反应的显著性特征来判断伪装效果的好坏。视觉注意机制是由刺激引发、基于目标显著性的一种心理调节机制,依靠明显的地物特征,能够快速指向感兴趣的目标,其中,就包括“自上而下”的认知模型,也叫目标驱动机制[13]。因此,目标探测的相关指标可以用来描述地物的视觉显著性,既模仿了人眼视觉的注意机制,也避免了人工判别的主观性。
像元的异常探测值和虚警率是描述异常探测性能的两个重要指标,探测值越大,说明地物与背景区分越明显,伪装效果越差;而虚警率则反映了异常探测算法的整体检测错误率,可以体现一定区域范围内伪装目标的整体伪装效果,虚警率越大,则说明伪装效果越好。除此之外,目标的探测面积也是视觉注意系统的一项重要指标,在高光谱图像下则表现为潜在目标区域的像元数量,很显然,目标的覆盖范围越大,暴露的风险也就越大。
综上所述,对聚类融合得到的潜在目标区域,采用最高探测值、虚警率和目标面积3个指标评价伪装效果。
1.2.1 最高探测值
异常探测是逐像元的检测,每个像元被赋予了一个反映与背景差异度的探测值,所有像元的探测值构成了异常探测结果total_map. 最高探测值表现了潜在目标区域的异常水平,这个值越大,说明待测像元是异常像元的可能性越大。
假设共存在n个潜在目标区域,则定义第i个潜在区域的最高探测值为
(4)
式中:target_mapi为第i个潜在目标区域的目标探测值;vi为第i个潜在目标区域的最高探测值。
1.2.2 虚警率
对于高光谱类异常探测问题往往基于二元假设,目标存在为H1,目标不存在为H0. 虚警率PFA是异常探测过程中常犯的一类错误,即做出决策为H1时,实际结果为H0的情况,因此,作出如下定义:
(5)
式中:R0为H0的决策域。
在考察伪装效果时,可以采用像元个数计算探测结果的虚警率,则有
PFA=nFR/nb,
(6)
式中:nFR为探测结果的虚警像元个数;nb为图像的背景像元总数。
对于真实的目标而言,一旦伪装就有可能降低这些目标被发现的概率,反而会使一些不是目标的某些像元显露出来,造成更高的虚警。因此,虚警率可以作为反映高光谱目标整体伪装性能的一个重要指标。
1.2.3 目标面积
从人眼注意系统来看,引起视觉关注的特征除了目标与背景的光谱差异(采用最高探测值来体现)外,还有目标的暴露面积。
目标的暴露面积si可以用第i个潜在目标区域的像元个数ni来恒量,即
si=cni,
(7)
式中:c为比例常数,其大小并不影响该判据,计算时取c=1.5.
2 基于搜索策略的伪装综合评价方法
时间搜索策略广泛用于军事目标的搜索和识别系统,并将有限时间搜索模型和无限时间搜索模型用于军事目标识别概率的研究,取得了较为不错的效果[23-25]。时间搜索模型建立在人眼观察目标的基础上,而对于高光谱图像而言,光谱信息不能直接可视化,但是,可以转化为对搜索模型参数指标的建模分析上。因此,本文基于高光谱伪装特征指标,建立了基于时间搜索模型的伪装综合评价体系。
2.1 无限时间搜索模型
最早的探测概率公式是基于无限时间模型提出的经验探测公式,如(8)式所示,其反映了观察者观察目标得到探测结果的概率趋势:
(8)
式中:N为观察的对象个数;N50为目标探测概率为50%时已观察的对象个数;多数情况下,指数E可以表示为
E=2.7+0.7(N/N50).
(9)
图5为无限时间搜索模型的探测概率曲线。从图5可以看出,随着观察对象的增多,目标探测概率逐渐增大,且呈现出“慢- 快- 慢”的变化趋势,最终趋向于1. 但是,无限时间搜索模型建立在各目标探测概率相同的假设基础上,并不能说明不同目标之间的探测差异,也就不能对不同目标进行伪装效果的评价。因此,在此基础上提出了有限时间搜索模型。
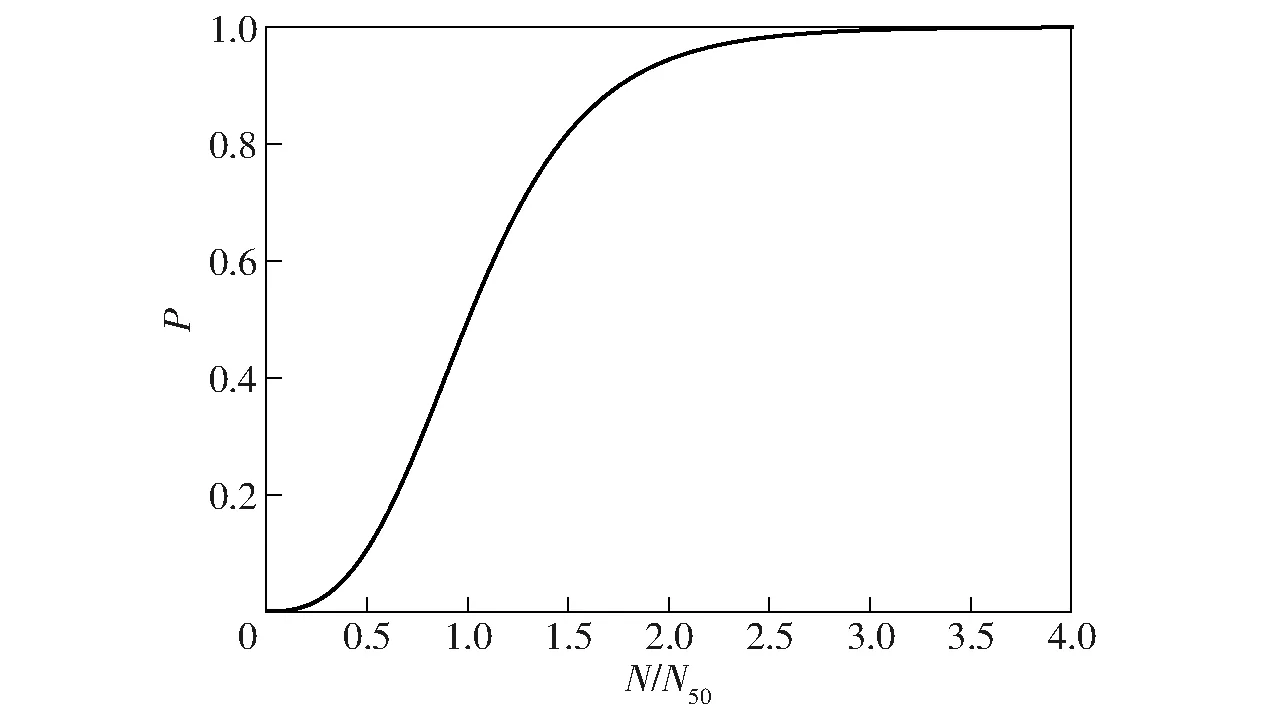
图5 无限时间搜索模型的探测概率曲线Fig.5 Detection probability curve of infinite time search model
2.2 有限时间搜索模型
目标探测必然是对时间依赖的,探测时间越长,探测概率越大。由此,部分学者提出了基于有限时间搜索的目标概率公式:
P(t)=P∞[1-e-t/τ],
(10)
式中:P∞为观察者在无限时间条件下对目标的探测概率,实际上是(8)式横坐标趋于无穷大时的极限值;t为观察者被赋予的探测时间;τ是所有观察者探测时间的平均值(假设所有观察者具有相同的探测能力),τ可以通过经验公式获得:
(11)
仅有(10)式仍然无法体现出目标的差异性,由此引入延迟时间td,得到改进之后的目标概率公式为
(12)
式中:τFOV是一个时间常数,体现了在观察视野范围内目标所用的平均观察时间。
延迟时间td为观察者观察目标的感知时间,也称为决策时间或反应时间。其反映了观察者在搜索一副图像时,对不同的兴趣点所观察的先后顺序,它提供了对于目标探测难度的量级预测。可以认为,目标的伪装效果越好,则观察者发现它们所花费的时间也就越多。
2.3 伪装综合评价方法
基于有限时间搜索模型的探测概率模型依赖P∞和τFOV两个参数的估计,图6给出了参数P∞和τFOV与探测概率的关系曲线。从图6中可以看出,P∞对探测概率的幅度大小影响较大;而τFOV主要决定了探测概率曲线收敛速度的快慢,τFOV越大,则收敛速度越慢。
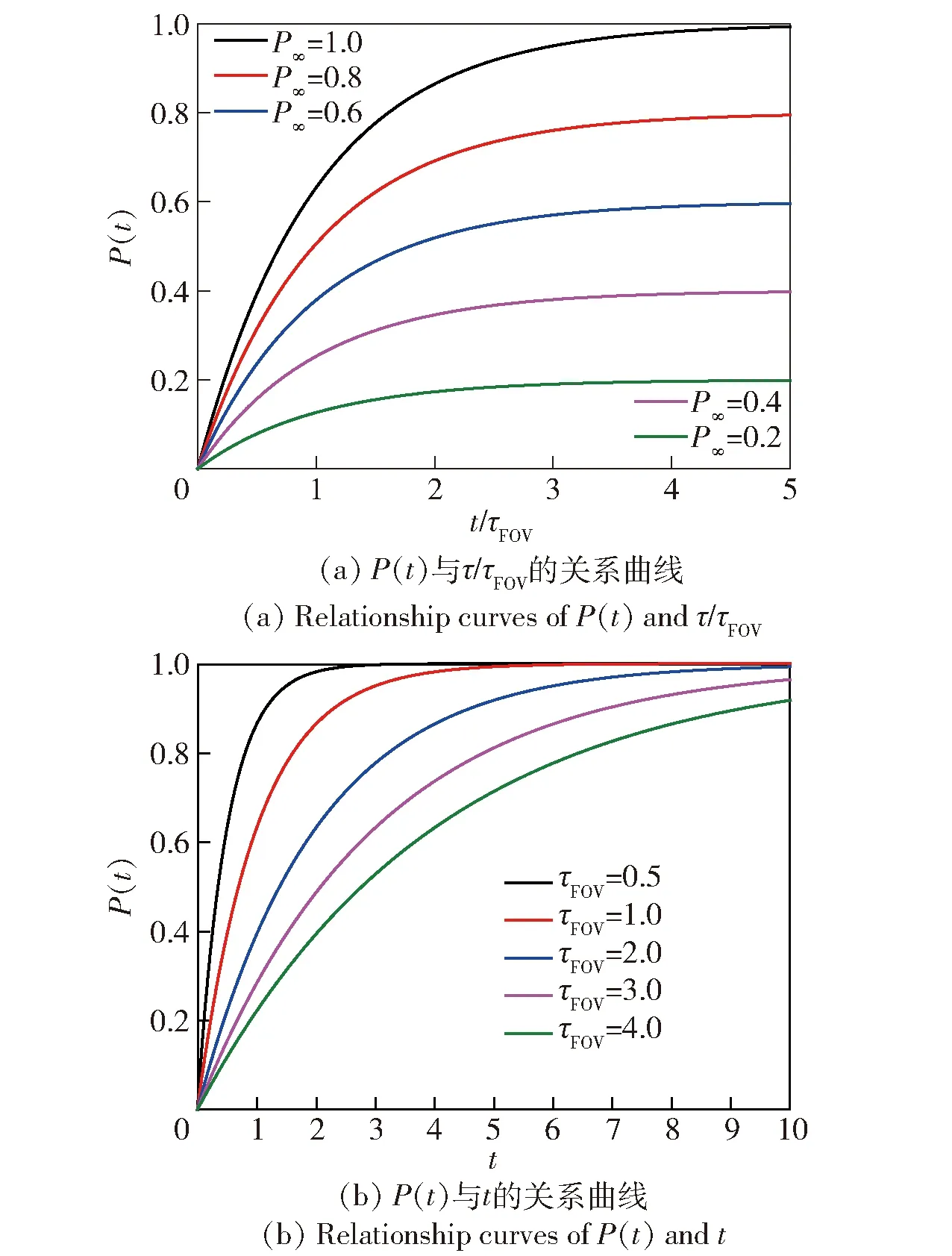
图6 参数P∞和τFOV对探测概率的影响(td=0)Fig.6 Influences of P∞ and τFOV on detection probability (td=0)
为了将伪装效果评估的最高探测值、虚警率和目标面积3个指标融入到(12)式,给出伪装效果评估的综合评价结果,需要与延迟时间td、极限探测概率P∞和时间常数τFOV的估计结合起来。由此,给出概率公式的3个关键指标的估计方法。
2.3.1 延迟时间td
延迟时间td体现了潜在目标区域的探测顺序,因此,第i个潜在目标区域的延迟时间tdi可以由(13)式确定:
tdi=a0(ndi-1),
(13)
式中:a0为一个常数,与概率函数的收敛时间有关;ndi为第i个潜在目标区域的探测顺序。
探测顺序反映了目标的显著性,经过1.2节的分析,应与最高探测值vi和目标面积si有关。因此,在对向量v和向量s归一化处理的基础上,建立线性加权决策向量f,对f中元素排序的结果即为向量nd:
f=wvv+wss,
(14)
式中:权重wv和ws采用熵权法确定。
(15)
2.3.3 时间常数τFOV
时间常数τFOV的影响主要体现在探测概率函数的收敛速度上,对于观察者而言,收敛速度决定了对伪装目标判别的快慢。而异常探测的虚警率则表现了目标的整体伪装效果,因此,可以通过虚警PFA来表达时间常数τFOV:
τFOV=κPFA,
(16)
式中:κ为调整因子。
将目标概率P(t)作为伪装效果的评分值,由此可以确定评价函数的表达式为
(17)
这里伪装的评分值Scorei是一个关于时间t的函数,表达了目标检测过程中人眼判别的时间连续性,这对于描述探测过程中目标的伪装效果评估具有开创性的意义。
3 实验验证与分析
采用高光谱成像仪AVIRIS和ROSIS拍摄的两组高光谱数据进行实验,分别对综合评价结果和伪装嵌入后各指标的评价性能进行分析。
3.1 实验数据描述
3.1.1 AVIRIS实验数据
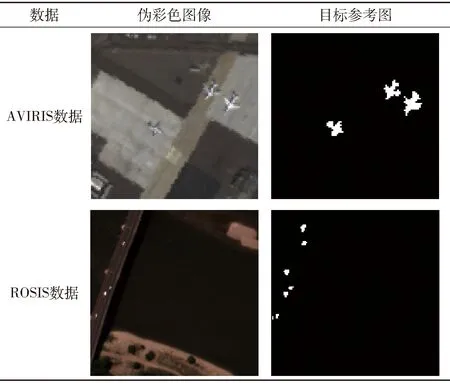
第1组数据采用美国San Diego海军的高光谱数据,如表1第1行所示。其中,去除水汽吸收、噪声等干扰波段,共剩余201个可用波段,光谱覆盖范围为0.4~1.8 μm,空间大小为100像素×100像素,共有3个目标用于伪装效果的评估。
3.1.2 ROSIS实验数据
第2组数据采用意大利北部Pavia Center的高光谱数据,如表1第2行所示。其中,共包含102波段,图像大小为150像素×150像素,共有6个目标可用于伪装效果的评估。
表1 AVIRIS和ROSIS高光谱数据
Tab.1 AVIRIS and ROSIS hyperspectral data
3.2 综合评价结果
为检验基于搜索策略的综合评价方法可靠性,利用AVIRIS数据中的3个飞机目标进行仿真实验。
图7展示了分割潜在目标区域的计算过程。首先对图7(a)所示的高光谱图像进行异常探测,探测算法采用最为经典的LRX异常探测算法,根据目标的形状设定滑动窗的大小为15像素×15像素,得到如图7(c)所示的探测结果。在此基础上,采用DBSCAN聚类算法聚类,并结合空间融合算法连接邻域像元,舍去孤立像元,最终得到如图7(e)所示的7个潜在目标区域。
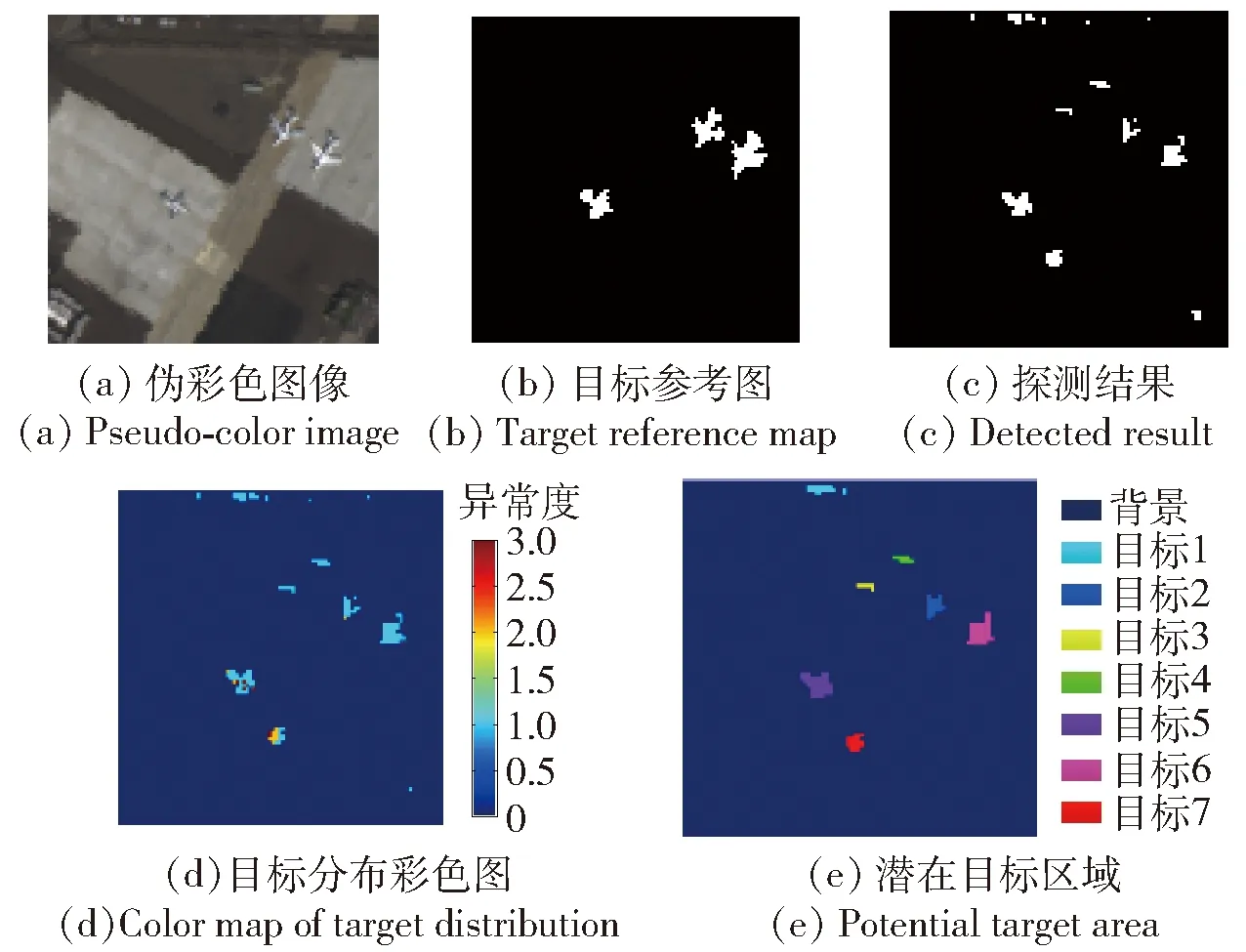
图7 分割潜在目标区域Fig.7 Segmentation of potential target area
计算7个潜在目标的区域伪装评估指标如表2所示,主要包括最高探测值、虚警率和目标面积。在此基础上,给出了不同目标的注意程度排序结果,以及伪装评价函数的相关指标,包括延时时间、极限探测概率和时间常数τFOV.
将计算得到的7个潜在目标区域的相关指标代入到评价函数中,得到如图8所示基于有限时间搜索的伪装评价分数曲线。分别对目标2、目标5、目标6共3个飞机目标进行分析,可以看出目标5和目标6与背景具有较明显的差异,要先于其他目标被观察者注意到,但随着时间推移,目标1表现出更易被观察者识别的特征,被识别的概率超过了目标6,相比而言,目标6变得更难被观察者发现。而目标2与背景差异并不明显,在所处背景中,相对于其他目标,具有更好的伪装性能。
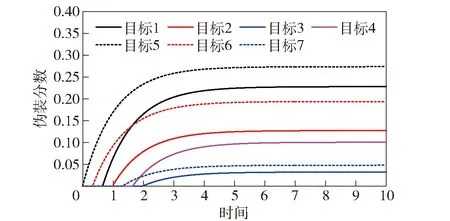
图8 不同潜在目标区域的时间- 伪装分数曲线Fig.8 Time-camouflage score curves of different potential target areas
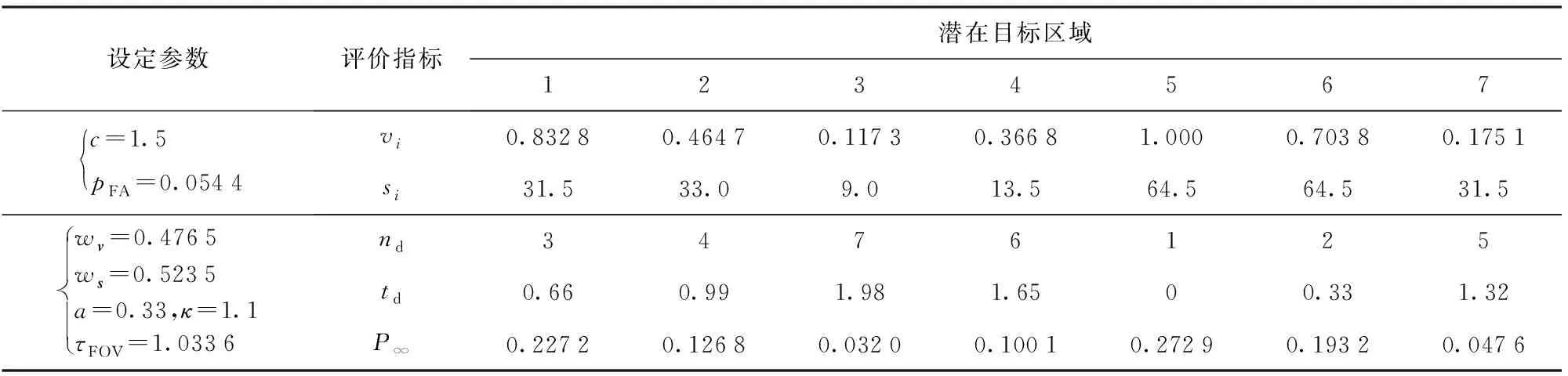
表2 伪装评估模型的相关指标(AVIRIS数据)
3.3 光谱混合实验
3.3.1 背景光谱嵌入
由于现有的伪装手段多用于可见光、红外和雷达等侦察条件,没有可靠的抗高光谱侦察全波段伪装方式。实际工程中,多模仿背景地物的某些特征进行伪装材料的设计,从而达到隐蔽目标特征,防止探测设备侦察的目的。借鉴异常目标检测实验中常用的线性光谱混合模型[25],本文采用背景光谱嵌入的方法合成伪装后的目标光谱,进一步验证伪装效果评估方法的可靠性。
如图9所示,ROSIS数据中共有5个潜在目标区域,提取周围背景像元的平均光谱曲线,对潜在目标区域按固定百分比线性嵌入,以模拟伪装后的高光谱图像。图10为目标1伪装嵌入前后的平均光谱曲线。

图9 潜在目标区域分割结果Fig.9 Segmentation of potential target area
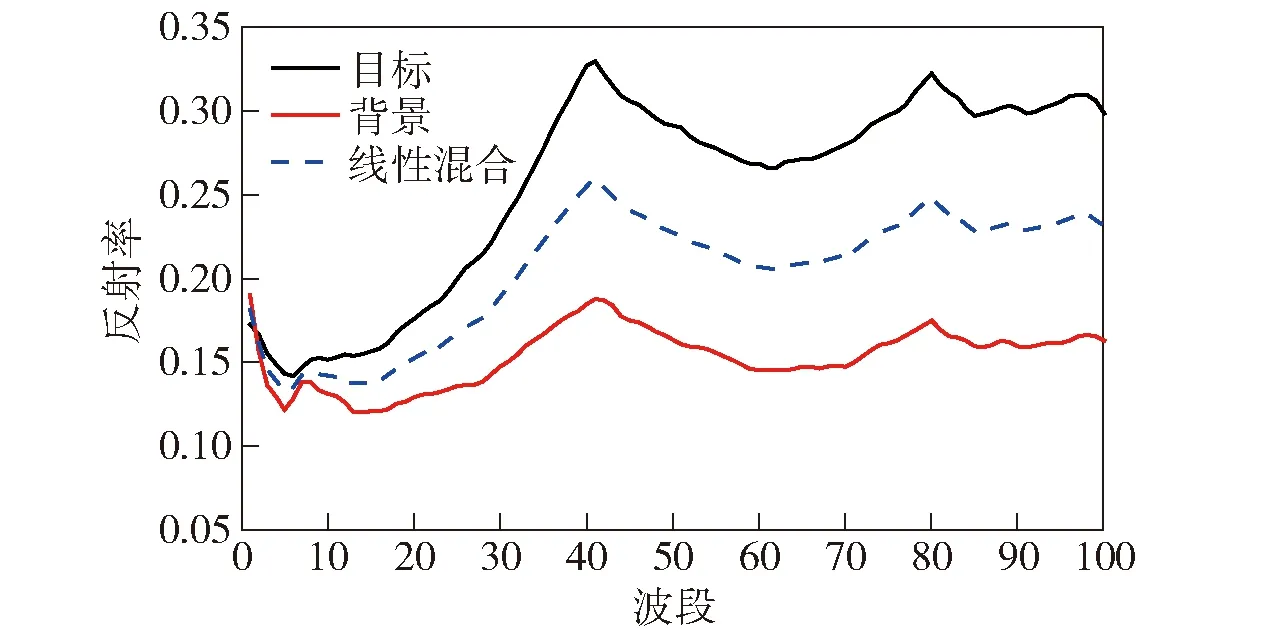
图10 伪装嵌入比例50%前后目标1的平均光谱曲线Fig.10 Average spectral curve of Target 1 before and after camouflage embedding of 50%
曲线面积(AUC)是指接收机曲线与x轴构成区域的面积,经常被用来评价探测器的探测效果。为说明线性伪装嵌入方法对于提高潜在目标区域伪装能力的可行性,分别采用LRX算法、KRX算法和CRD算法对不同嵌入水平的目标区域进行探测,利用AUC值作为评价目标伪装水平的一项重要指标。分别取伪装光谱的比例为0%~100%(间隔10%),得到不同探测算法的AUC值如图11所示。
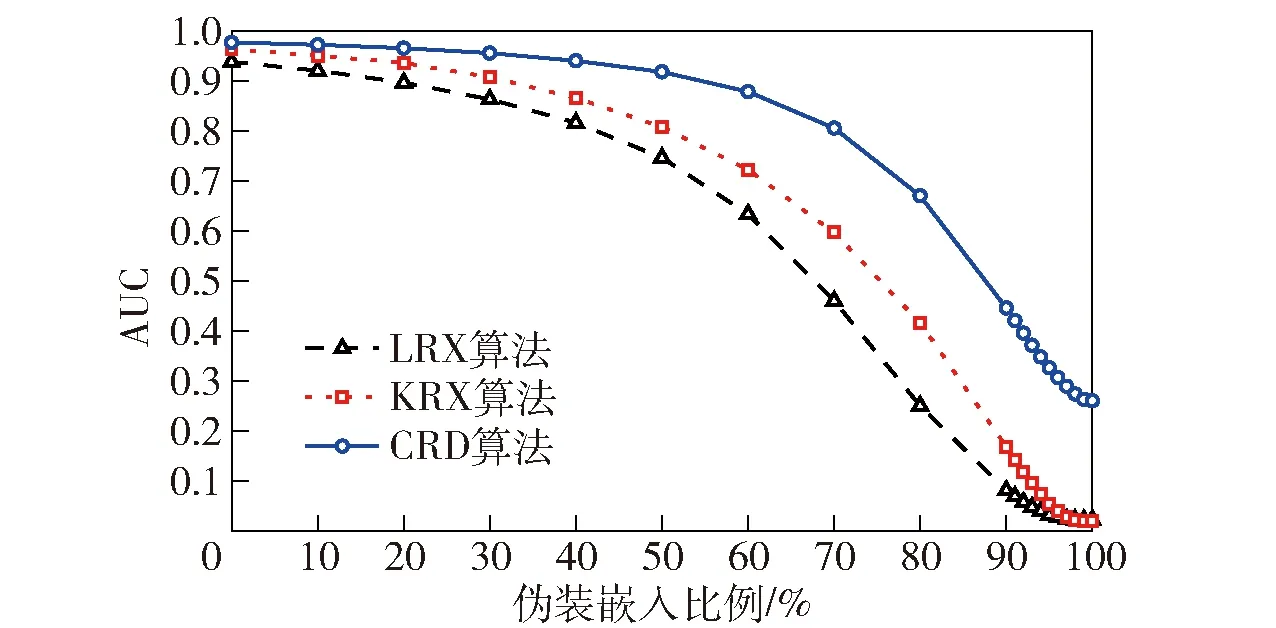
图11 不同伪装水平下的目标探测效果曲线Fig.11 Target detection effect curves at different camouflage levels
从图11可以看出:随着伪装光谱的比例逐渐增加,AUC值逐渐减少,说明目标越难被探测,即潜在目标区域的伪装水平越高;当伪装光谱的比例达到100%时,检测指标接近0,验证了基于线性光谱混合模型的伪装嵌入方法对于模拟潜在目标区域伪装能力的有效性。
3.3.2 伪装效果评估
利用最高探测值作为评价指标,检验潜在目标区域的伪装水平,得到如图12所示的评价结果。可以看出,随着伪装嵌入程度的提高,7个潜在目标区域的最高探测值显著减少,说明异常探测的难度增加。
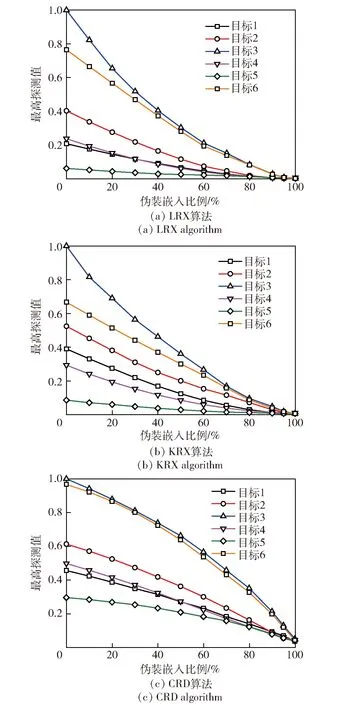
图12 潜在目标区域的伪装水平分析Fig.12 Camouflage level analysis of potential target area
为充分验证本文所提伪装评估方法的有效性,选取潜在目标6进一步分析,采用LRX异常探测算法,得到不同伪装水平(背景比例+伪装比例)下的综合评价分数曲线,如图13所示。从图13可以看出,随着伪装水平的提高,伪装分数显著减少,并且发现目标所需的时间明显增加,搜索进度变慢,充分说明了基于时间搜索策略的综合伪装效果评估方法的全面性和准确性。
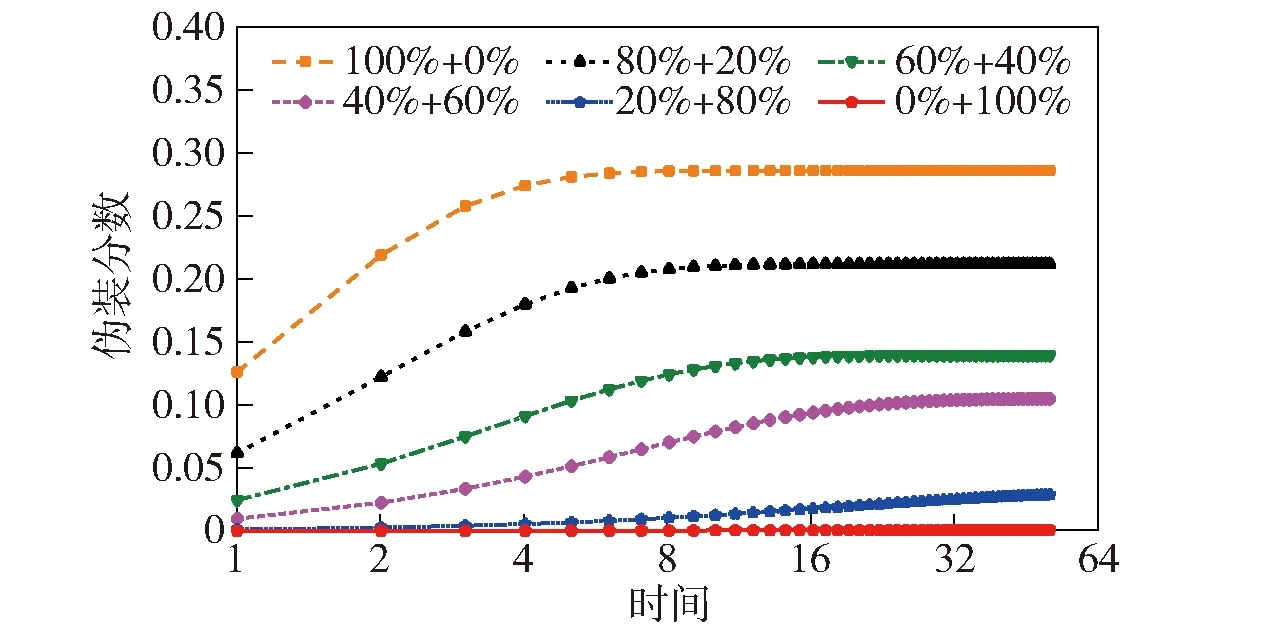
图13 不同伪装嵌入水平下的时间- 伪装分数曲线Fig.13 Time-camouflage score curves at different camouflage embedding levels
4 结论
本文采用了一种聚类融合的潜在区域构造算法,并针对分割得到的目标区域,建立了评价伪装效果的3个指标;在此基础上,提出一种基于搜索策略的伪装综合评价方法,并给出了较为客观的评估结论。通过实验进行验证,得出以下结论:
1)将高光谱的异常目标探测技术直接用于伪装效果评估,可以体现目标与背景的差异性,且无先验地探测,避免了人为干预,评估结论更具有可靠性。
2)对潜在目标区域提取了最高探测值、目标面积及虚警等评估参数,通过这些参数可以多角度地分析目标的伪装效果。
3)基于有限时间搜索的综合评价模型,增加了对于目标伪装效果的时间过程分析,可以从时间、空间两个维度分析目标伪装效果,对于解决伪装评估指标单一等问题,具有一定的借鉴意义。
4)本文的评估对象是基于“潜在目标区域”的,可能会出现伪装目标不在评估区域的情况,则后续的讨论将没有意义。因此,可以考虑增加先验区域。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
电子测试(2017年15期)2017-12-18 07:19:27
智能系统学报(2015年4期)2015-12-27 09:38:39
中国光学(2015年5期)2015-12-09 09:00:28
电子设计工程(2015年6期)2015-02-27 12:04:53
食品工业科技(2014年23期)2014-03-11 18:18:54