针对打车软件的分心驾驶研究
2019-08-21 10:19冯谢星张新钰张颖麟曹立波
中国机械工程 2019年15期
冯谢星 张新钰 张颖麟 曹立波,3
1.湖南大学汽车车身先进设计制造国家重点实验室,长沙,4100822.清华大学汽车安全与节能国家重点实验室,北京,1000843.湖南大学深圳研究院,深圳,518000
0 引言
2015年,美国国家公路交通安全管理局报告显示:近50%的交通事故与驾驶员分心驾驶有关,分心驾驶已成为道路交通安全中日益严重的威胁[1]。分心驾驶有许多形式,包括次要任务的影响、无指向性视觉漂移和疲劳等[2]。其中,次要任务的影响主要包括打电话、使用导航以及相关的其他任务所造成的分心。近年来,车载信息系统(in-vehicle information systems, IVIS)快速发展,不仅传统交互形式(如操作MP3、使用导航、接打电话等)会造成驾驶员注意力的分散,打车软件作为新生事物也成为造成驾驶员分心的重要原因。打车软件在全球范围内广泛应用,仅在中国打车软件就有高达2亿8100万的用户规模,与之相关的分心驾驶比例也快速上升[3]。因此,研究打车软件对驾驶行为及其可靠性的影响具有重要意义。
目前,许多学者对分心驾驶进行了大量研究。马勇等[4]基于实车道路实验数据,采用统计学方法,研究了视觉分心对驾驶员转向操作车道偏离的影响,结果表明车道偏离程度随分心时长的增加而增大,且增大速度越来越快。高振海等[5]提出考虑人-车-路特性的无意识车道偏离识别方法,改进了车道偏离预警系统的工作效能。WANG等[6]通过记录志愿者的脑电图(electroencephalography , EEG)和行为,采用独立分量分析(independent component analysis ,ICA)法作为空间滤波器,并通过基于径向基函数(radial basis function, RBF)核的支持向量机(support vector machine, SVM)建立驾驶员注意力评估体系,该系统实现了驾驶任务方面的FOA(focus of attention)检测与评估。然而,基于脑电图的方法在数据收集和分析方面存在复杂机制,有其自身的局限性[7-8]。电流皮肤反应(galvanic skin response, GSR)是情绪唤醒的最敏感标记之一,被称为皮肤电导反应(skin conductance response , SCR)或电-皮肤活动(electrodermal activity, EDA)[9]。GSR很容易收集。RAJENDRA等[10]研究了自然驾驶条件下利用GSR检测分心驾驶的可能性,实验结果表明,在受试者存在非独立的情况下,检测准确性高。PRZYBYLA等[11]通过分析NGSIM(next generation simulation)数据库中驾驶员行为数据和道路交通数据库来识别驾驶员的基本行为与特征,通过认知心理学方法对识别结果进行优化,并在此基础上建立了跟车操纵错误的分析模型,从而预测了分心驾驶下的安全风险。LI等[12]基于证据理论框架,通过分析驾驶员注意力分散、被削弱以及疲倦等情况实时评估车辆的安全性,实验结果表明该方法可以有效改善车辆预警系统的鲁棒性以及时间响应。ARBIE等[13]研究了潜在的分心对自然驾驶环境中公交驾驶员驾驶表现的影响,结果表明驾驶员仅与乘客谈话并不会影响驾驶员的正常驾驶。KIM等[14]、殷国栋等[15]研究了高速公路上的可变信息标志对驾驶者驾驶的影响。HOSKING等[16]研究了使用手机检索和发送短信对年轻新手驾驶表现的影响,结果表明驾驶员进行电话通话会导致车头时距缩短,车辆横向位置保持不佳,以及对危机事件反应延迟。CHISHOLM等[17]研究表明,编辑短信会导致车辆横向位置的变化率增大50%,车头时距变化率增大150%。HORREY等[18]的研究表明,手动操作iPod会导致驾驶员对危机情况的反应变慢。高振海等[19]为探索驾驶员精神状态与生理信号之间的关系,建立了基于生理信号的认知负荷评价方法,结果表明,相对于单一驾驶任务,双任务工况下驾驶员感受的主观压力随着任务难度的增大而增大,心率变异性功率谱密度、皮电水平和呼吸频率等生理指标与驾驶员的认知状态具有较强的关联性,因而可以有效区分不同认知负荷的两种状态。
但是,目前针对打车软件的研究较少,并且尚未见探讨如何改进交互模式以减小对驾驶安全的影响。本文针对驾驶员与打车软件交互模式,利用方差分析(analysis of variance, ANOVA)方法和事后检验分析方法(Post Hoc)研究在不同交互模式下,跟车时距、转向误差、转向速度以及平均速度等指标的变化,并通过建立可靠度模型评价了各交互模型的安全风险。其中,交互模式包括信息提醒方式(文字提醒、语音提醒、综合提醒)和操作方式(无操作、手动操作、语音操作)。
1 试验设计
1.1 试验设备
使用Forum 8公司生产的模拟驾驶仪进行试验。该模拟驾驶仪包括三台42英寸液晶屏幕,距离驾驶员0.8 m,提供120°的视场。模拟驾驶仪以30 Hz采集驾驶员操作以及车辆运动数据。此外,一台5.1英寸的智能手机被安放在模拟驾驶仪上,该手机与驾驶员正前方视角成水平方向30°和竖直方向15°的夹角。为了提供真实且可控的试验环境,使用APP Inventor软件制作了试验打车软件,该软件与普通打车软件有相同的界面,但是订单的内容和发出时间是可控的。
1.2 试验对象
由于年轻驾驶员驾驶经验较少,且对新技术有较高兴趣,且年轻驾驶员分心驾驶导致事故率比较高[20],因此,本研究的18名志愿者均为23~27岁男性。志愿者均有过使用打车软件的经验,并且熟悉它的工作机制。所有志愿者均有较好的视力,保证其可以无障碍地获取手机屏幕上的打车信息以及模拟驾驶仪上的交通标志。
1.3 试验方案
试验采用3×3的组内设计,包括打车软件的三种操作方式:无操作(控制组)、手动操作、声控操作和三种信息提示方式:文字提醒、语音提醒、综合提醒(文字语音同时提示)。试验中,志愿者在虚拟环境中驾驶三圈,其中一圈作为控制圈,一圈采用手动操作,一圈采用声控操作;除控制圈外,各圈内均有12次订单提醒,其中文字提醒、语音提醒、综合提醒分别为4次。
本试验的虚拟驾驶环境是一个8 km的闭合环路,环路包括三部分:变道任务区域、跟车任务区域、普通城市道路部分。变道任务区域是一段1 800 m的直道,每隔约150 m(均值M=150,标准差σ=46.4)有一个变道标志。在这一区域中,志愿者被要求以60 km/h的速度驾驶,并且在看到变道标志的第一时间变入指定车道;在其中的三个变道点,会有打车订单需要志愿者处理。跟车区域是一条单车道直道,领航车辆以50 km/h行驶,并有5次突然减速到20 km/h,志愿者要求对前车减速及时反应,并始终保持1.5 s的跟车时距;其中有3次减速会伴随订单。普通城市道路是双车道直道和弯道,志愿者被要求以60 km/h的速度正常行驶,有4辆停在路边的车辆会突然启动并入志愿者车道,志愿者需要及时刹车,以避免碰撞危险,其中在三个危机情况下会伴随着打车订单。
打车订单以文字、语音及文字/语音综合方式展示在手机上,订单内容是出发地和目的地,志愿者要判断是否接单,如果决定接单,则使用手触摸屏幕上的“接单”按键或者说出“接单”两字(分别在不同的试验圈中)实现接单。现实中,司机是否接单会考虑许多因素,本研究中,为了试验的可控性和可重复性,简化了接单原则:出发地和目的地是长沙市的二十个地点,如果订单不需要跨越湘江,即出发地和目的地都在河东或者都在河西,则接单;如果要跨越湘江,则不接单。
1.4 试验流程
志愿者首先签署试验同意书,填写个人基本信息;然后,志愿者对长沙地图上的20个候选地点进行记忆,并且熟悉接单规则。接下来,志愿者进行模拟驾驶仪操作以及打车APP操作训练,时长约10 min。最后进行正式试验,在试验场景中行驶3圈,每圈耗时约8 min。每个试验者总耗时约75 min。
2 试验数据分析
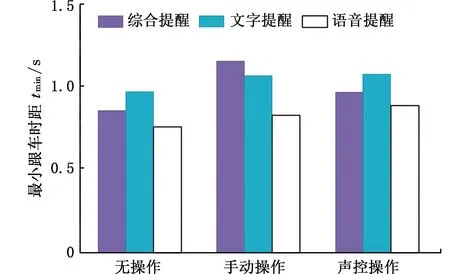
图1所示为危机事件中驾驶数据对比图,横坐标为操作方式,包括无操作、手动操作以及声控操作,每组柱状图中从左到右分别表示综合提醒、文字提醒以及语音提醒。图1a纵坐标表示车辆距离危机时间发生点60 m时的接近速度。分析图1可得如下结论:在危机事件的任务中,提醒形式和提醒-操作形式的交互作用对接近速度没有显著影响,但对最小跟车时距有显著影响。最小跟车时距反映了碰撞危险程度,数值越小,碰撞危险性越大。对比所有工况下的最小跟车时距,手动操作和文字/语音综合提示下该指标最小,最小跟车时距tmin=0.721 s。因此,该工况在打车软件设计中应予以充分考虑,避免该危险工况的出现,从而保证驾驶安全。
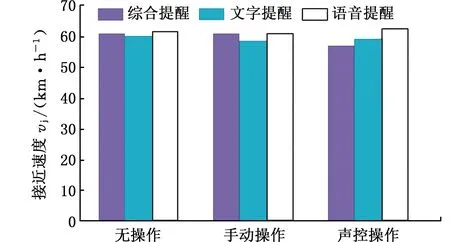
(a)接近速度

(b)最小跟车时距图1 危机事件中驾驶数据对比图Fig.1 Driving performance in hazard events
图2所示为跟车任务中驾驶数据对比。按照试验要求,志愿者应该与前车保持1.5 s的跟车时距。分析图2可得如下结论:在跟车任务中,无操作情况下,志愿者可以很好地按要求保持跟车时距。手动操作和声控操作情况下,平均跟车时距均会增大。其中,文字提醒和声控操作的情况下,平均跟车时距最接近标准跟车时距,并且其最小跟车时距优于无操作情况,因此,在打车软件设计过程中,可以考虑该提醒与操作方式,从而保证驾驶安全。

(a)平均跟车时距
(b)最小跟车时距图2 跟车任务中驾驶数据对比图Fig.2 Driving performance in car following task

(a)转向误差

(b)转向速度图3 变道任务中驾驶数据对比图Fig.3 Driving performance in lane changing task
图3所示为变道任务中驾驶数据对比。转向误差以及转向速度均可以表征驾驶员对车辆的横向控制水平,转向误差和转向速度越小,说明横向控制越平稳,反之则越不稳定。分析图3可得如下结论:提醒方式对转向误差和转向速度有显著影响,其中,综合提醒会导致转向误差较大,因此,在软件设计过程当中,应当避免综合提醒的方式,以保证驾驶安全。
3 可靠度评价
3.1 驾驶行为可靠性框架
为充分研究打车软件信息提醒方式和操作方式对驾驶安全的影响,本文通过构建基于感知、判断以及操作等的驾驶行为可靠度模型,以打车软件的使用为特定条件,对其在不同交互模式下的驾驶安全可靠度进行评价。
图4为驾驶行为可靠性框图,其中跟车时距是志愿者对驾驶环境的感知、判断以及相应操作的综合反映。变道任务中的平均速度和危机事件的接近速度体现了志愿者对车辆速度的判断和对油门的操控。变道任务中的转向速度和转向误差体现了志愿者对车辆转向的判断和对转向盘的操作。

图4 驾驶行为可靠性框架Fig.4 Driving behavior reliability framework
3.2 驾驶行为可靠度模型
根据文献[21-22]中的模型建立原则,将跟车时距、速度控制、转向控制相互串联,而关于速度和转向的变量分别并联,据此,得到驾驶行为系统的可靠度模型如下:

(1)
式中,pi为可靠性框图中第i个部件对系统整体可靠度的概率重要度;R1为跟车时距所代表的感知及判断可靠度;R2、R3分别为表示平均速度和靠近速度所代表的速度控制可靠度;R4、R5分别为转向误差和转向速度所代表的转向控制可靠度。
R1、R2、R3、R4、R5选用单参数指数分布计算,即
Ri=e-λit
(2)
式中,Ri为第i个组件的可靠度;λi为第i个组件的可靠度模型参数;t为时间。
该分布满足:①在0时刻不会发生驾驶失误;②在无限远的时刻一定会发生驾驶失误;③在时间区间上,函数总是单调下降的,函数值域为[0,1]。其中,根据模拟试验的基本参数,对数据进行统计处理,求得7种不同的操作方式/提醒方式组合的各项参数,如表1所示。其中,Op1表示“无操作”,Op2表示“手动操作+综合提醒”,Op3表示“手动操作+文字提醒”,Op4表示“手动操作+语音提醒”,Op5表示“声控操作+综合提醒”,Op6表示“声控操作+文字提醒”,Op7表示“声控操作+语音提醒”;λ1表示跟车时距,λ2表示平均速度,λ3表示靠近速度,λ4表示转向误差,λ5表示转向速度。

表1 可靠度模型参数Tab.1 The parameter of reliability model
本文通过层次分析法(analytic hierarchy process, AHP)计算概率重要度pi。依据下列规则构造比较矩阵:aij=1,元素i与元素j重要性相同;aij=3,元素i比元素j稍微重要;aij=5,元素i比元素j重要;aij=7,元素i比元素j重要得多;aij=9,元素i比元素j极其重要;aij=2n,n=1,2,3,4,元素i与元素j的重要性介于aij=2n-1与aij=2n+1之间;aij=1/n,n=1,2,…, 9,当且仅当aji=n。比较矩阵如下:
(3)
计算得其最大特征向量所对应的特征值并进行归一化,得到概率重要度
p=[0.438 7 0.038 1 0.096 7 0.215 0 0.166 4]
(4)
3.3 驾驶行为可靠度评价结果与分析

图5 驾驶行为可靠度评价结果Fig.5 Driving behavior reliability evaluation result
按照式(2)计算不同交互模式下的驾驶安全可靠度,如图5所示。据图5可得以下结论:①7种交互方式可靠度大小顺序为无操作、声控操作+文字提醒、手动操作+文字提醒、手动操作+语音提醒、声控操作+语音提醒、手动操作+综合提醒、声控操作+综合提醒。②提醒方式对可靠度的影响明显,其中文字提醒方式下,驾驶安全可靠度较高,语音提醒情况下次之,综合提醒情况下最低。该结论与第2节数据分析结果一致,因此,在软件设计过程中,综合提醒的方式必须避免,以保证驾驶安全。③除无操作以外,在交互模式中,文字提醒+声控操作交互方式安全可靠度最高,在软件的设计过程中可以予以充分考虑。该结论亦与第2节的数据分析结果一致,也从侧面证明了此种模型在驾驶安全分析中的正确性。
4 结语
本文针对新兴出现的打车软件,基于驾驶模拟试验,对18名志愿者进行了驾驶试验,分别统计了跟车任务、变道任务以及危机事件任务中驾驶员的行为数据,探究其操作方式和提醒方式对驾驶员驾驶表现的影响。试验结果表明:①提醒方式对驾驶行为安全性影响明显,其中,综合提醒的方式影响最大,在打车软件设计过程中应予以避免;②文字提醒+声控操作交互方式的驾驶行为安全性最高,在打车软件的设计过程中应予以充分考虑;③利用方差分析和事后检验分析法进行数据初步分析,并根据跟车时距、速度控制以及转向控制建立可靠度模型,评价不同交互模式下驾驶安全可靠度,其结论与数据初步分析结果一致,该方法为驾驶行为安全性提供了一种更加直观的评价思路。
猜你喜欢
人类工效学(2021年5期)2022-01-15
摄影之友(影像视觉)(2019年3期)2019-03-30
语文天地·初中版(2018年4期)2018-09-01
戏剧之家(2017年6期)2017-05-04
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
小学阅读指南·高年级版(2016年7期)2016-07-25
小学阅读指南·低年级版(2016年7期)2016-05-14
小雪花·初中高分作文(2015年7期)2015-09-23