基于二次预测型横向载荷转移率的汽车侧翻预警研究
2019-08-21 10:19金智林严正华
中国机械工程 2019年15期
金智林 严正华
1.南京航空航天大学能源与动力学院,南京,2100162.重庆理工大学汽车零部件先进制造技术教育部重点实验室,重庆,400054
0 引言
汽车侧翻是一种严重的交通事故,美国国家高速公路交通安全管理局的统计数据表明,2016年美国共发生606.4万车次交通事故,汽车侧翻事故仅占2.0%,而汽车侧翻伤亡人数占交通事故伤亡人数的18.9%[1]。侧翻事故往往在很短的时间内发生,当驾驶员感知到汽车的侧翻状态时,往往很难在短时间内及时纠正,而当侧翻事故发生时,带来的损失是巨大的,因此,提出合适的预警算法能在侧翻事故未发生时对驾驶员作出预警,使驾驶员提前感知汽车的侧倾状态,同时算法能够弥补控制器的时滞特性,使其能够提前做出控制措施。
针对侧翻预警,国内外学者进行了很多研究工作。CHEN 等[2-4]基于汽车侧翻简单模型进行了汽车侧翻预警研究,并引入神经网络方法,提高了预警算法的准确性。朱天军等[5]结合经典Kalman状态估计技术实时准确估计重型车辆的状态,并研究了基于改进侧翻预警时间(time to rollover)的重型车辆侧翻预警算法。金智林等[6-7]提出了汽车动态侧翻过程稳定性的评价指标,并给出了基于动态稳定的汽车侧翻预警算法。褚端峰等[8]考虑到行车的动态过程,将车辆当前侧向加速度与实时侧向极限加速度的比值作为侧翻判定条件,提出了改进侧翻预警时间的预警算法。除了传统的对侧翻预警时间的研究以外,对其他侧翻预警指标的研究也取得了很大进展。LARISH等[9]、LI等[10]提出利用预测型横向载荷转移率对未来时刻的侧翻危险作出预警。YAMINE等[11]利用支持向量机(support vector machines,SVM)算法替代侧翻模型研究了重型车辆侧翻危险的可靠性预测指标。ZHU等[12]采用逆向神经网络,考虑车辆的多状态参数,对侧翻预警时间实时地进行了监测。ZHAO等[13]基于单一垂直轮胎力,融合迭代预测和衍生预测方法,提出了将预测垂直轮胎力(predictive vertical tire force,PVTF)作为新的侧翻预警评估指标。靳立强等[14]引进零力矩点(zero moment point,ZMP) 作为车辆侧翻指标,并结合侧翻时间的算法实现了车辆侧翻预警。精确的预警算法能有效地降低汽车发生侧翻风险的概率,因此提出简单易实现且预警精度高的预警算法是非常有意义的。
本文提出了基于二次预测型横向载荷转移率的侧翻预警方法,模拟高速紧急工况下汽车动态侧翻过程,建立汽车侧翻动力学模型,计算横向载荷转移率及其一次变化率和二次变化率,定义了二次预测型横向载荷转移率,并求解出了侧翻预警时间,以运动型多功能车(SUV)为对象在非绊倒型与绊倒型工况下进行侧翻过程汽车侧翻预警实时性及预警精度的仿真分析。
1 汽车侧翻动力学模型
1.1 整车动力学模型
以某SUV为研究对象,考虑汽车侧倾方向运动与横向运动、横摆运动之间的耦合关系,忽略垂向运动及俯仰运动的影响,忽略非簧载质量侧倾及侧向风影响,建立三自由度汽车侧翻动力学模型,如图1所示。
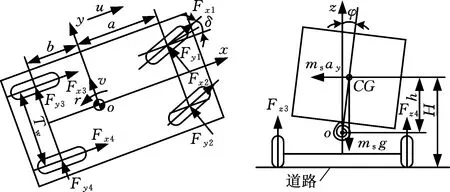
图1 汽车侧翻模型Fig.1 Vehicle rollover model
由汽车动力学知识可得横向动力学方程:
(1)
侧倾动力学方程:
(2)
横摆动力学方程:
(3)
式中,m为汽车质量;r为汽车的横摆角速度;ms为汽车的簧载质量;g为重力加速度;Iz为汽车绕z轴的转动惯量;Ix为汽车绕侧倾中心的转动惯量;cφ为悬架的等效侧倾阻尼;kφ为悬架的等效侧倾刚度;u、v分别为车辆坐标系中的纵向和侧向速度;a、b分别为质心到前后轴的距离;δ为前轮转角;φ为簧载质量侧倾角;H、h分别为汽车簧载质量重心的高度和侧倾臂长;Ff、Fr分别为前后轮侧向力。
1.2 轮胎模型
在考虑主要轮胎动力学特性的前提下对轮胎进行线性化处理,得到轮胎侧偏角和侧向力关系如下:
βf=(v+ar)/u-δ
(4)
βr=(v-br)/u
(5)
(6)
(7)
式中,k1、k2分别为前后轮的侧偏刚度;βf、βr、β分别为前轮、后轮及质心侧偏角。
2 侧翻预警算法
2.1 二次预测型横向载荷转移率
横向载荷转移率(LTR)因其侧翻门槛值固定且适合各种车型,成为常用的侧翻指标[15],其定义为
(8)
即左右车轮垂直载荷之差与总垂直载荷之比。LTR的变化范围为[-1,1],当LTR=0时,汽车无侧倾;当LTR=±1时,车轮离地,为侧翻门槛值。但汽车行驶时左右车轮垂直载荷不易测量,LTR无法直接获得。根据汽车模型对LTR进行变换,可得汽车侧翻稳定性评价指标
(9)
式中,ay为汽车侧向加速度;T为汽车轮距宽度。
R值随着汽车状态的变化而变化。根据运动学关系可定义二次预测型横向载荷转移率:
(10)
式(10)即为从当前时刻经过Δt后的汽车侧翻指标值,右边由三项构成,第一项为当前时刻的R值,第二项表示R的一次变化率对未来时刻R值的影响,第三项表示R的二次变化率对未来时刻R值的影响。
2.2 侧翻预警时间
侧翻预警时间TTR定义为汽车从当前时刻到发生侧翻的时间间隔,侧翻预警时间可对汽车侧翻危险进行预警,将当前汽车侧翻危险信号量化为时间参数提供给驾驶员或防侧翻主动控制系统,精准的预警时间能有效地达到防侧翻危险的作用。由汽车侧翻定义可知,汽车侧翻时横向载荷转移率绝对值达到临界值Rup。此时可令
|SPR|=Rup
(11)

(12)

(13)


(14)
由于测量值包含噪声,因此侧向加速度的导数及侧倾角加速度的导数若直接根据测量值求导,会导致结果不准确。为保证结果的精度,需对其进行变换,由汽车动力学理论可知
may=(k1+k2)β+(ak1-bk2)r/u-k1δ
(15)
(16)
则
(17)
(18)
(19)
(20)
同理
(21)
(22)
(23)
(24)
(25)
综合式(22)~式(25)可得R二次变化率的求解式为
(26)
由式(9)、式(12)、式(20)及式(26)可得,R的一次变化率与二次变化率所包含的变量均可通过相应传感器测得,保证了结果的准确性,同时可求解出预警时间TTR。
3 实例验证
为验证预警算法的准确性及预警精度,以某 SUV 为对象,选取典型侧翻工况进行分析,仿真流程如图2所示。在Carsim软件中选取侧翻工况获得前轮转角,输入SUV模型得到汽车运行状态参数,用于汽车侧翻预警算法,获得TTR。SUV参数如表1所示。
3.1 非绊倒型工况
选取典型的汽车易发生侧翻的J-turn工况进行实验,选取的前轮转角为5°,车速选择80 km/h,设置预警时间上限为2 s,即当侧翻预警时间大于2 s时,汽车没有发生侧翻的危险。
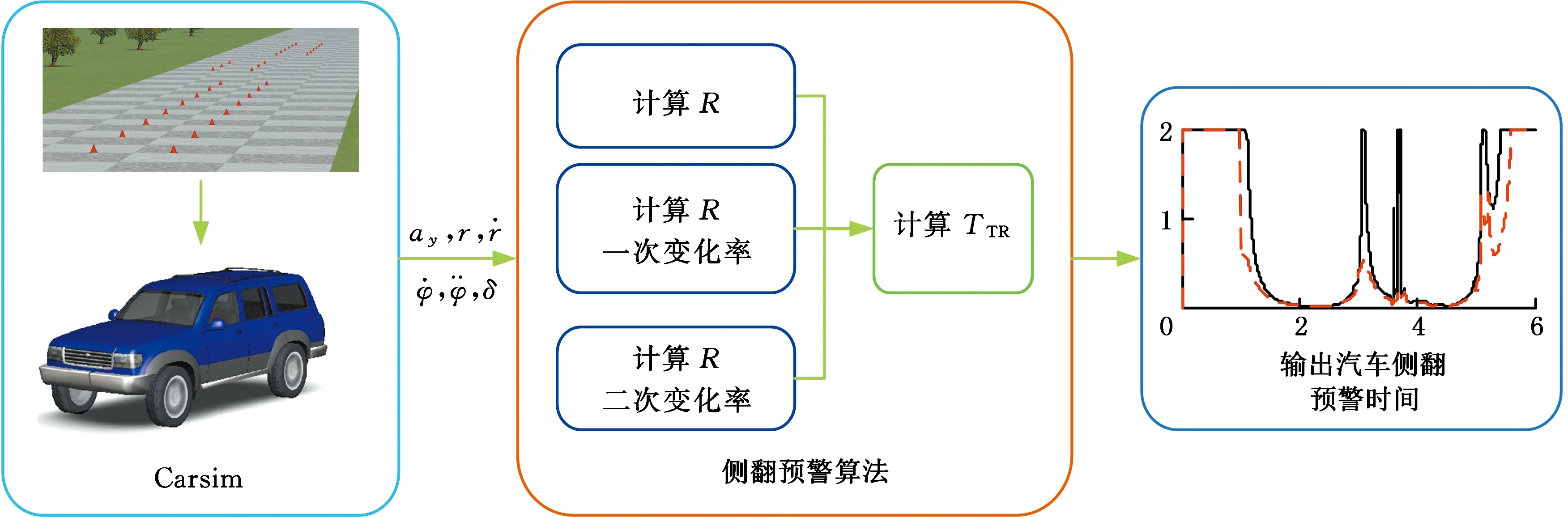
图2 仿真流程图Fig.2 Flow chart of Simulation
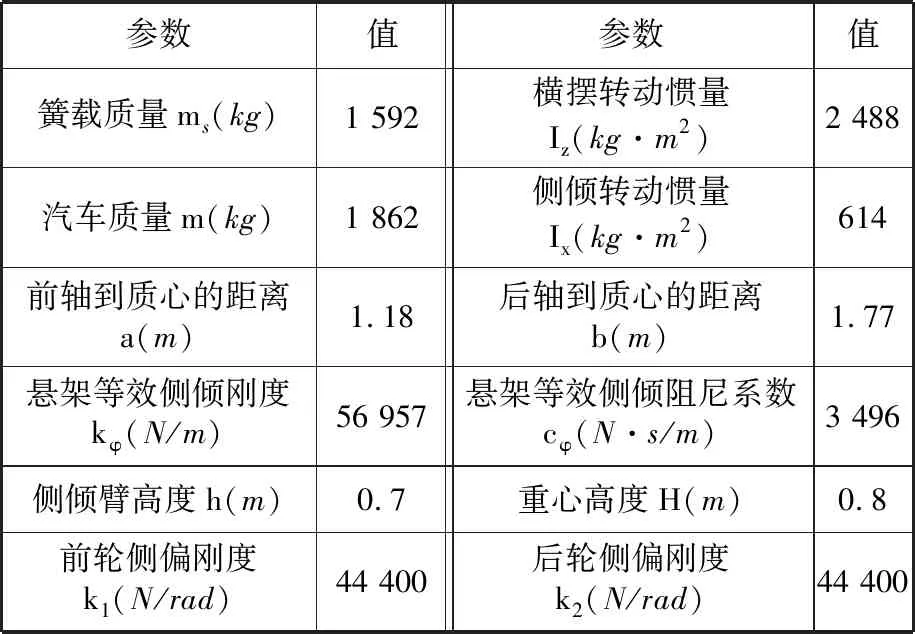
表1 SUV参数表Tab.1 SUV parameters
图3与图4分别为J-turn工况下汽车侧倾角与侧倾角速度相图以及汽车侧翻预警时间的变化曲线。由侧倾角与侧倾角速度相图可以看出,该工况下,侧倾角较大,汽车具有发生侧翻危险的趋势。由图4可以看出,传统预警算法与基于二次预测横向载荷转移率的预警算法均能很好地对侧翻危险作出预警,侧翻风险增大时,预警时间缩短,当外界条件不发生变化时,传统预警算法解除报警,而基于二次预测横向载荷转移率的预警算法考虑到R的二次变化率,仍能保持一定时间的预警状态,且预警时间更短,预警精度更高。
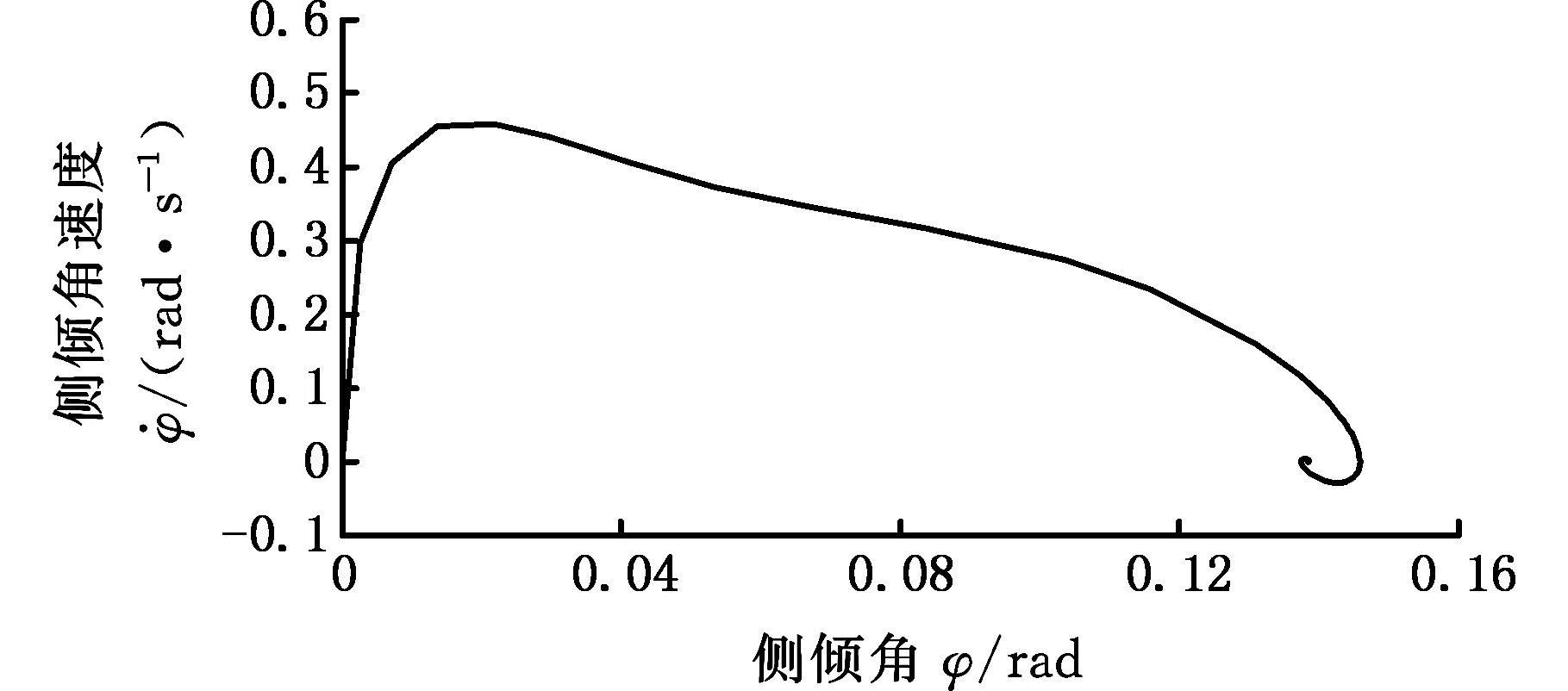
图3 J-turn工况侧倾角与侧倾角速度相图Fig.3 Phase diagram of roll angle and roll rate under J-turn condition
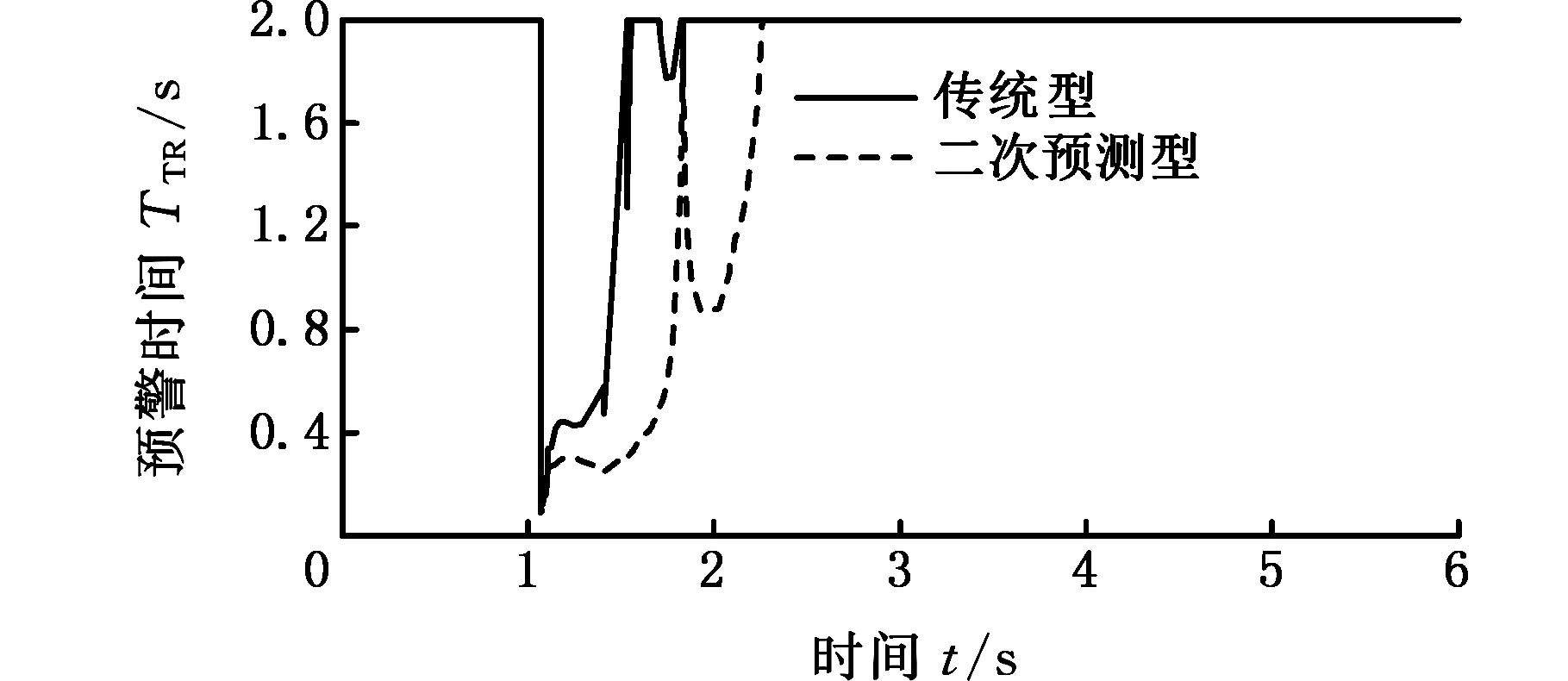
图4 J-turn工况侧翻预警结果Fig.4 Time to rollover under J-turn condition
为验证算法对工况的适用性,分别选择Fish-hook工况及Double-lane-change工况进行分析,车速选取100 km/h,前轮最大转角选择6°,仿真结果如图5~图8所示。
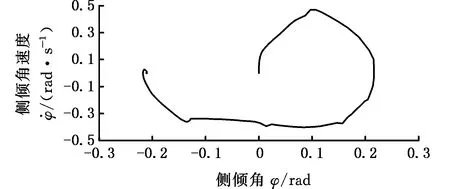
图5 Fish-hook工况侧倾角与侧倾角速度相图Fig.5 Phase diagram of roll angle and roll rate under Fish-hook condition
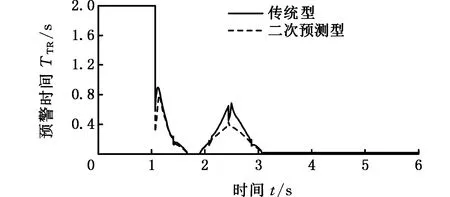
图6 Fish-hook工况侧翻预警结果Fig.6 Time to rollover under Fish-hook condition
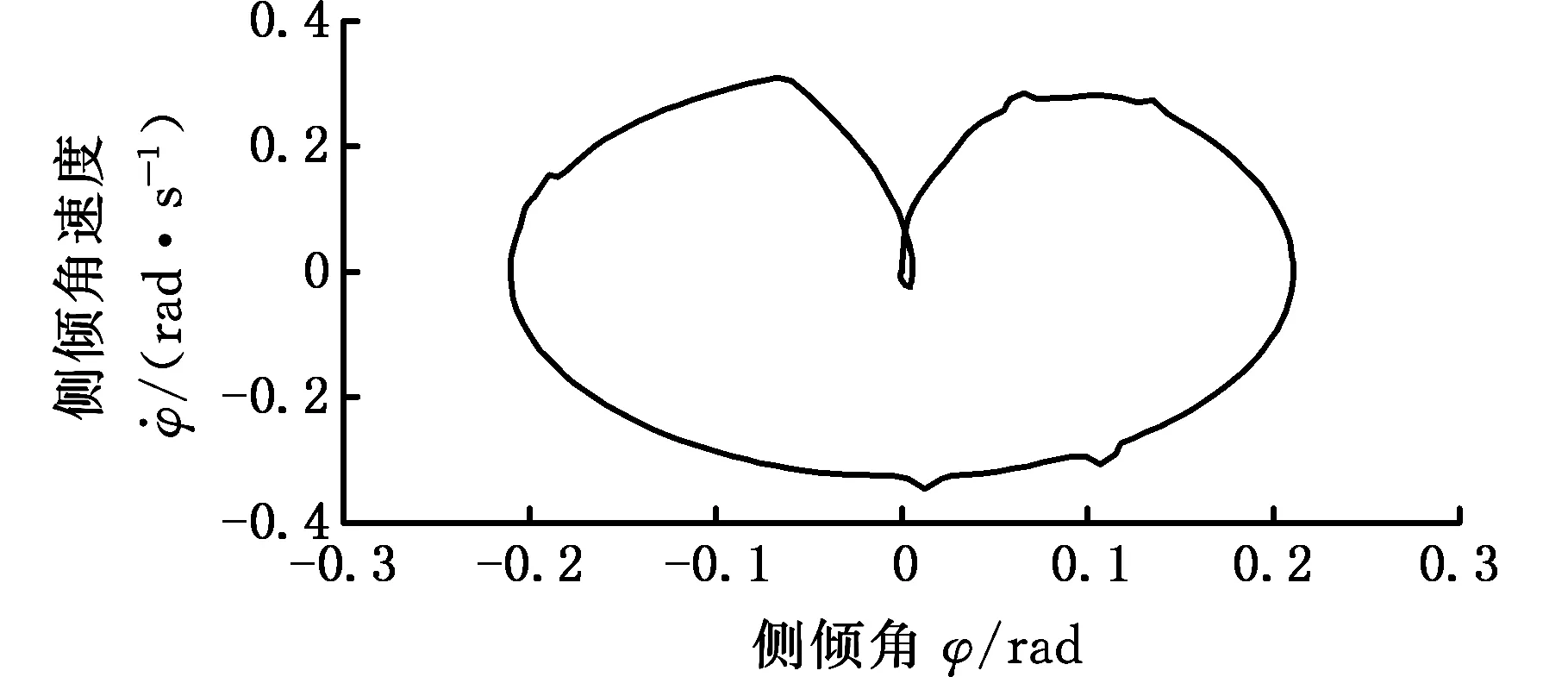
图7 Double-lane-change工况侧倾角与侧倾角速度相图Fig.7 Phase diagram of roll angle and roll rate under Double-lane-change condition
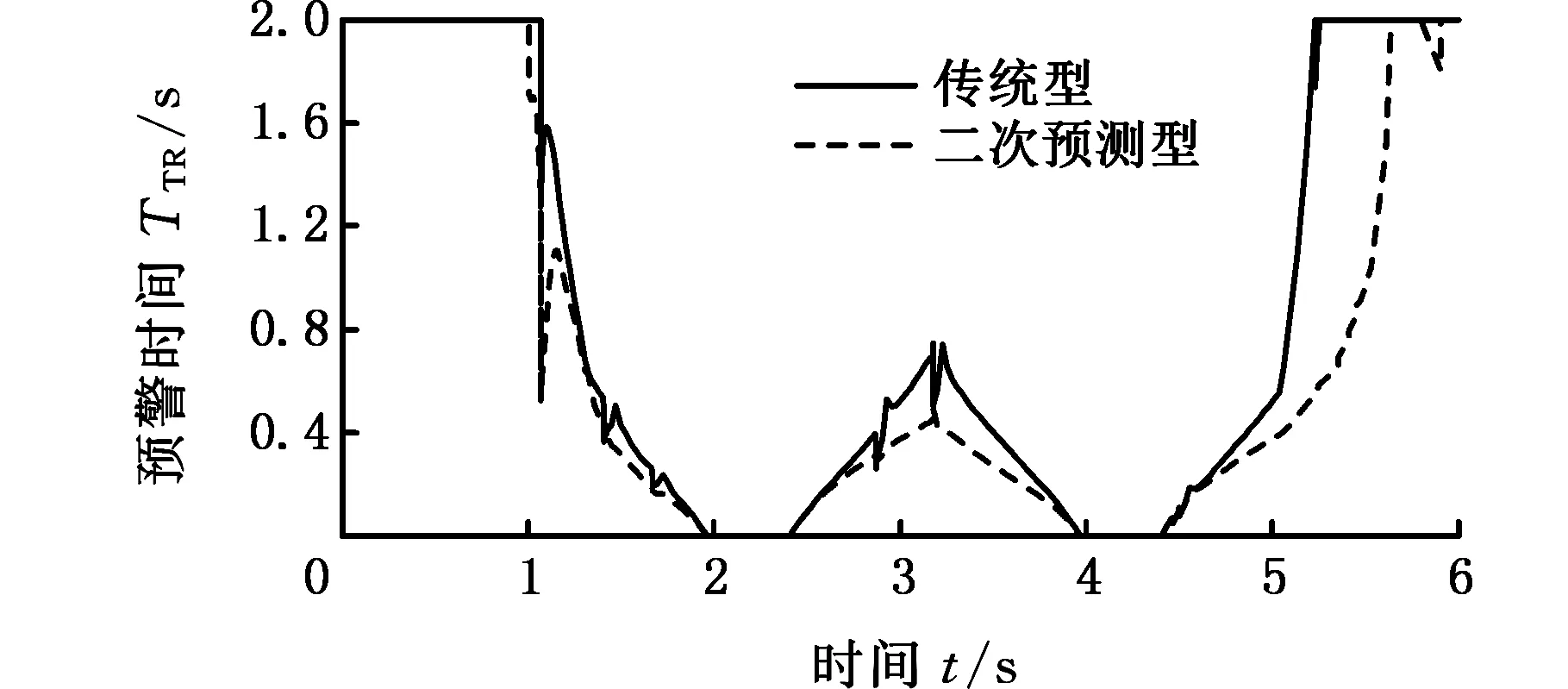
图8 Double-lane-change工况侧翻预警结果Fig.8 Time to rollover under Double-lane-change condition
在Fish-hook工况下,侧倾角相图发散,说明汽车此时已经发生侧翻。在此工况下,二次预测型预警算法具有很好的预警效果,发生侧翻后,预警时间保持为0,传统预警算法仅考虑横向载荷转移率一次变化率的影响,而考虑二次变化率影响使得预警时间更短,预警精度更高。从Double-lane-change工况下的仿真结果中同样可以看出,基于二次预测横向载荷转移率的预警算法具有较优的预警效果。
3.2 绊倒型工况
在车辆实际行驶过程中,绊倒型工况引起的侧翻问题较非绊倒型引起的侧翻问题发生的概率更高,造成的危害也更大。本节选取绊倒型工况进行分析,设置Double-lane-change工况的前轮转角为6°,车速为70 km/h,在3.5 s时给予左侧车轮路面脉冲激励,路面激励幅值为0.1 m。
由图9和图10可以看出,当存在路面激励时, 传统预警算法与基于二次预测横向载荷转移率的预警算法均能对此时的侧翻危险作出预警,但传统预警算法在激励发生时的预警结果抖动严重,预警精度下降,基于二次预测横向载荷转移率的预警算法预警结果较为平滑,抖动较小,预警准确度更高。
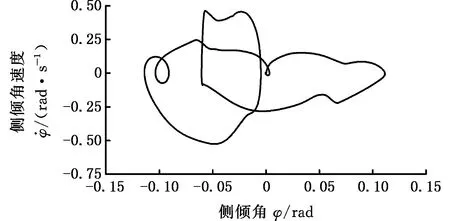
图9 绊倒型工况侧倾角与侧倾角速度相图Fig.9 Phase diagram of roll angle and roll rate under tripped rollover condition
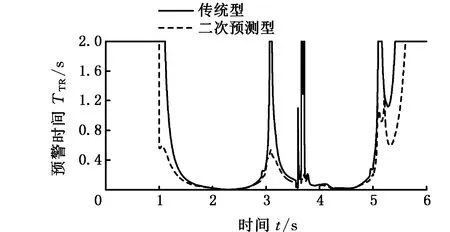
图10 绊倒型工况侧翻预警结果Fig.10 Time to rollover under tripped rollover condition
4 结论
(1)提出的基于二次预测横向载荷转移率的汽车侧翻预警算法包含的变量简单易测量,预警算法易实现。
(2)预警算法可提高动态侧翻过程汽车侧翻预警的精度,准确度更高。
(3)预警算法在非绊倒型与绊倒型工况下均能有效地对侧翻危险作出预警,降低误报警率,有助于改善汽车侧翻预警效果。
猜你喜欢
湖南电力(2021年4期)2021-11-05
通化师范学院学报(2021年10期)2021-10-27
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
现代临床医学(2021年1期)2021-01-26
科学大众·小诺贝尔(2021年10期)2021-01-22
通化师范学院学报(2020年12期)2020-12-21
初中生世界·九年级(2020年9期)2020-09-21
中成药(2017年6期)2017-06-13
火力与指挥控制(2016年8期)2016-09-21