某型无人机火箭助推发射系统设计及分析
2019-08-21 08:44:38安佳宁
指挥控制与仿真 2019年4期
安佳宁
(中国人民解放军92419部队,辽宁兴城 125106)
火箭助推发射型无人机,在助推火箭的作用下,可在很短的时间内获得起飞速度和一定的飞行高度,然后火箭自行脱落,无人机在发动机的作用下继续飞行。这种起飞方式机动性好,不受机场条件的限制,而且还可在地面或舰艇上进行发射起飞,扩大了无人机的使用范围,因而是一种常用的无人机发射方式。根据火箭助推器的使用数量可分为单发火箭助推和多发火箭助推,选择何种方式由无人机结构形式和气动布局决定[1],例如,美国“石鸡”无人机由于采用腹部进气,因此采用翼根布置2枚助推火箭的发射方式[2]。根据火箭助推器推力线与机身纵轴的相对位置,可分为夹角式和共轴式2种。夹角式助推方式推力座设置比较简单,但推力线控制与调整比较复杂,火箭脱落时容易与发动机发生干扰。共轴式助推方式,加速快,但推力座设置复杂,而且与无人机发动机协调困难[3]。某型无人机采用背部S弯进气道后置涡喷发动机布局方式,综合考虑各种因素,采用下托式单枚火箭助推夹角式发射方式,在无人机总体方案对发射系统技术要求一定的情况下,发射系统的设计主要集中在2个方面:1)发射架系统的设计;2)发射参数的选择。高速无人机不同于低速无人机横向转动惯量小,发射过程中受到扰动容易出现大角度滚转,特别是火箭助推器将无人机重心大幅度后移,造成了无人机静稳定度降低,甚至变为静不稳定,给发射控制带来难度[4-5]。笔者在对高速无人机发射架设计的基础上,对发射过程进行了详细分析,建立了发射过程仿真模型。在建模过程中将无人机和火箭作为组合体进行分析,对气动力矩系数进行了修正,考虑了火箭助推器的气动力和组合体重心变化影响,编写了仿真程序并对发射过程相关参数的选取进行了分析,给出了火箭推力线下偏的合适角度来抵消涡喷发动机带来的低头力矩。实际飞行检验了设计方案和参数选取的合理性。
1 发射架系统设计
发射架系统设计主要包括发射架设计、助推器连接方式和脱落方式选择。
1.1 发射架设计
目前,零长发射架主要有2种:倒伏式发射架和短轨式发射架。倒伏式具有发射架重量轻的优点;短轨式具有发射初段抗干扰能力强的优点,但是整个发射架重量较大,为了具有较强的机动性,选择倒伏式发射架,如图1所示。该发射架在确定发射位置后可以调平并用锚钎固定在地面上,发射架的发射角可以借助调整螺母在10°~20°之间进行调整。发射架设有前倒机构,无人机机身前段设备舱两侧的支撑点在发射时支承在前端支撑的叉形件上,发射时前端支撑随着无人机的运动向前倒下,以避开机体后面的进气道和平尾等部件。发射架还设有一个后端支撑,在无人机机身后段发动机舱下面中间位置的支撑点就支承在发射架的后端支撑上。发射架上设有闭锁机构以保证无人机在火箭助推器启动前不会因发动机的推力发生运动,只有当火箭助推器点火后达到一定推力时切断支架上的剪断螺栓,无人机才能被发射起飞[6]。
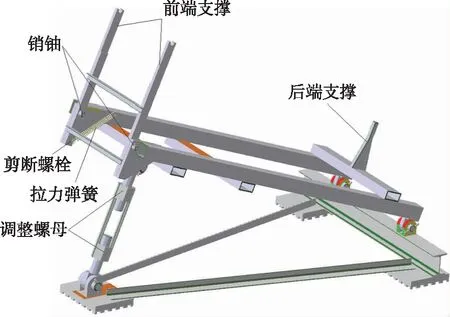
图1 发射架结构
1.2 连接方式选择
在无人机后机身下部安装有顶锥,顶锥轴线与机身轴线夹角为推力线夹角,助推器顶杆头部为锥窝,锥窝轴线与助推器轴线共轴。助推器安装如图2所示,顶杆锥窝与机身顶锥配合,约束助推器头部轴向、周向自由度,同时助推器尾部支撑在发射架后支架上,后支架与助推器托环配合,约束助推器尾部轴向、周向自由度。发射前助推器借助顶锥、发射架后支撑组件共同作用,保证助推器与无人机连接。助推器点火工作时,在推力作用下,顶锥、顶杆锥窝锥面自适应配合,保证推力线相对机身轴线要求。当剪切销剪断后,无人机在助推器推力作用下向上运动,发射架后支撑组件与助推器约束解除。当助推器工作完毕,在助推器重力和气动阻力作用下,助推器与无人机分离。
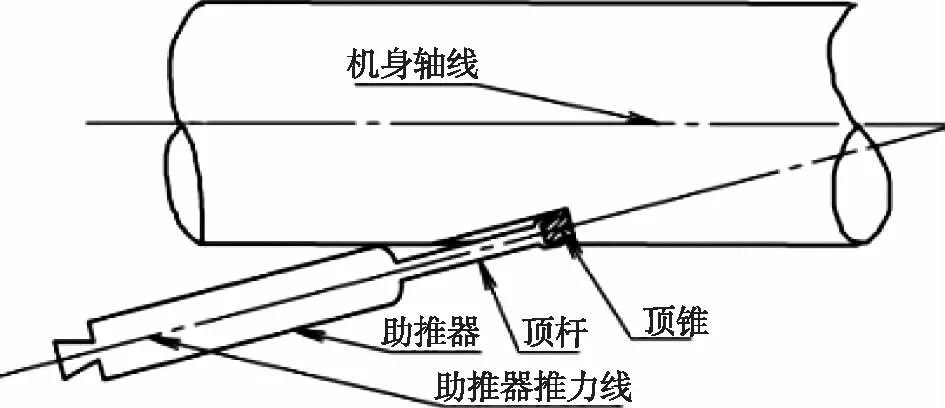
图2 助推器安装
2 发射过程建模
火箭助推阶段动力学模型可以分为3个阶段讨论:助推点火——飞机未脱离发射架阶段、脱离发射架——助推结束、助推器脱落阶段。由于本无人机采用的是零长发射,没有滑轨,因而,无人机在发射阶段,其受力过程可以分为2个阶段:火箭助推段和火箭脱离后的加速爬升段,其中,火箭脱离后的加速爬升段受力与空中段相同。火箭脱落过程虽然短暂,但是其对无人机姿态有较大影响。由于发射过程时间较短,因此认为在整个发射过程中无人机质量不变(燃油不消耗),转动惯量不变,无人机和火箭组合体的质心和转动惯量的变化由助推火箭重量和转动惯量的变化引起。根据固体火箭燃烧方式(由中心向外侧燃烧)可以认为助推火箭在整个发射过程中质心位置不变,质量逐渐减小。在此基础上可以建立无人机发射过程中的六自由度动力学和运动学方程[7]。
在无人机发射过程中,受到的外力包含有:重力、空气动力、发动机推力、助推火箭推力、发动机进排气产生的力以及力矩等;气动力静导数由风洞试验获取,加工的风洞试验模型进气道入口和尾喷管进行了修型处理,因此获取的气动数据必须进行发动机进排气影响修正(进排气对升力特性影响较小,对阻力特性和俯仰力矩特性影响较大,最大升阻比降低了2左右,并产生显著的抬头力矩)。因此,无人机受力情况综合表示如下所示。
F=Faerodynamic+Fturbo-jet+Frocket+g
(1)
M=Maerodynamic+Mturbo-jet+Mrocket
(2)
2.1 气动力模型
气动升力、阻力、侧力通常是在风轴系进行表示和定义的,表示为
(3)
气动俯仰力矩、滚转力矩及偏航力矩通常是在体轴系进行表示和定义的,表示为

(4)
无人机在发射阶段,空气动力存在很强的非线性,因此不能用简单的线化方程来描述,其表达式如下所示。
升力系数
(5)
阻力系数
CD=CD(α、δe、Ma)
(6)
俯仰力矩系数
(7)
侧力系数

(8)
滚转力矩系数
(9)
偏航力矩系数

(10)
由于CFD仿真和风洞试验力矩系数均以无人机重心为参考点,而发射过程中由于助推火箭的影响,力矩系数参考点的位置发生偏移,改变为以组合体重心作为参考点。重心偏移的定义为:ΔXG=XG-Xref,当重心后移时ΔXG>0。ΔYG=YG-Yref,当重心向右机翼方向移动时ΔYG>0。 ΔZG=ZG-Zref,当重心向下移动时ΔZG>0。发射过程中随着火箭药柱的燃烧ΔXG、ΔYG、ΔZG在不断变化。
动态力和力矩系数修正公式如下:

静态空气动力需要修正的是力矩系数,修正方法如下。
俯仰力矩系数修正
(11)
滚转力矩修正
ΔCl=(CL·ΔYG+Cy·ΔZG)/Lspan
(12)
偏航力矩修正
ΔCn=(CD·ΔYG+Cy·ΔXG)/Lspan
(13)
由于助推火箭采用了短粗构型,其截面直径达到无人机机体直径的一半,而且距火箭和无人机组合体质心较远,可能产生一定量的俯仰力矩,因此在仿真过程中未忽略助推火箭的升阻力,其升阻力系数采用如下模型:火箭可视为等直径的圆柱体,圆柱体气动力系数如图3所示(圆柱体参考面积定义为横截面直径D×长度L)。
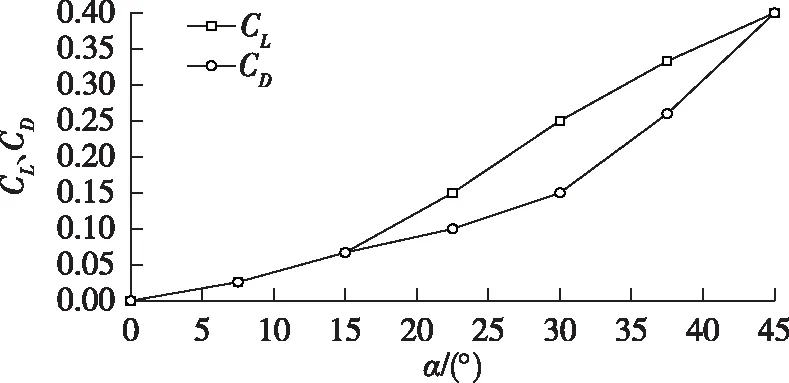
图3 圆柱体气动系数经验曲线
火箭迎角定义为:αrkt=αUAV+η,其中η为火箭安装角。相对于无人机与火箭组合体重心,火箭气动力产生的俯仰力矩系数修正为
碳关税的本质是一种出口税,其征收体现在出口商品的价格变化中,本文以中国出口至美国商品征收碳关税为例,则出口方程可由式(6)
(14)
其中lrkt→cg为火箭重心到组合体重心的距离。
2.2 发动机推力数学模型
发动机推力在机体坐标系中的表达式如式(15)所示,对本型无人机来说,发动机安装角为零,即发动机推力轴线平行机身轴线,因此Py=0,Pz=0。

(15)
投影到气流轴系表示为
(16)
涡喷发动机安装在机身轴线上,通过无人机重心,但不通过无人机和火箭组合体重心,会产生低头力矩,其表达式为:

(17)
(18)
式中lturbo-jet为涡喷发动机推力作用点位置向量。
2.3 火箭作用力数学模型
火箭的推力通常在体轴系中表示
(19)
其中:α连接为火箭轴线与机体OXZ平面的夹角;β连接为火箭轴线与机体OXY平面的夹角,正β两使推力产生正侧力分量。
在气流轴系中表示为
TW=LWBTB
(20)
在助推火箭推力线不通过重心情况下,火箭推力对无人机的力矩作用为
Mrkt=lrkt×TB;
(21)

(22)
式中,lrkt为火箭推力作用点位置向量。
火箭脱落后无人机受力为正常飞行受力。
3 发射过程控制模型
无人机发射过程中控制的首要目标是保证无人机姿态的稳定,因此整个发射过程不进行外回路控制。由于航向角控制会导致无人机出现较大的滚转角,因此也不进行航向角控制。整个发射过程只进行俯仰角控制和滚转角控制。由于发射段气动力参数等与正常飞行时不同,因此在发射段控制参数与正常飞行段控制参数的选取上略有不同。控制率数学模型如公式(23)和公式(24)所示。
UδE=Kqq+Kθ(θC-θ)
(23)
UδA=Kpp+Kφ(φC-φ)
(24)
4 火箭安装偏差范围
在火箭助推段无人机刚脱离发射架时飞行速度小,高度低,舵面无法充分发挥其气动效率,因而在此阶段,重点在于选择合适的发射参数,在综合各种因素后选择具体发射参数如下:火箭安装角15°,发射架倾角17°。由于采用吊挂方式对推力线进行校准,存在操作误差,为保证无人机正常起飞必须对火箭安装角偏差范围进行仿真计算。利用Matlab编制了仿真程序,对整个发射过程进行了仿真,仿真时间10 s,在此过程中不对无人机发送任何指令。火箭助推器常温基准工作时间为2.5 s。
4.1 火箭安装角纵向偏差范围
在发射参数确定后,发射过程稳定性主要受到火箭安装偏差的影响,当火箭推力线未通过无人机和火箭组合体重心时会带来侧偏力矩,由于发射过程中无人机舵面效率低,如果侧偏力矩过大,舵面无法纠正,将导致无人机发生翻转,发射失败。纵向偏差是指火箭实际推力线与过组合体重心推力线之间存在上下偏差,经过组合体重心上方或下方,因此会产生低头力矩或抬头力矩。涡喷发动机推力线经过机身纵轴,因此在发射阶段涡喷发动机推力线在无人机和火箭组合体重心的上方,会产生低头力矩,为了平衡这个低头力矩,应该使火箭推力线经过组合体重心的下方,即负夹角。经过初步分析选取-0.3°、-0.4°、-0.5°、-0.6° 4个角度进行仿真分析如图4所示。可以由俯仰角变化曲线看出,虽然推力线下偏了-0.3°,但是俯仰角依然在火箭工作段逐渐变小,直到-0.5°才稳定在15°左右。
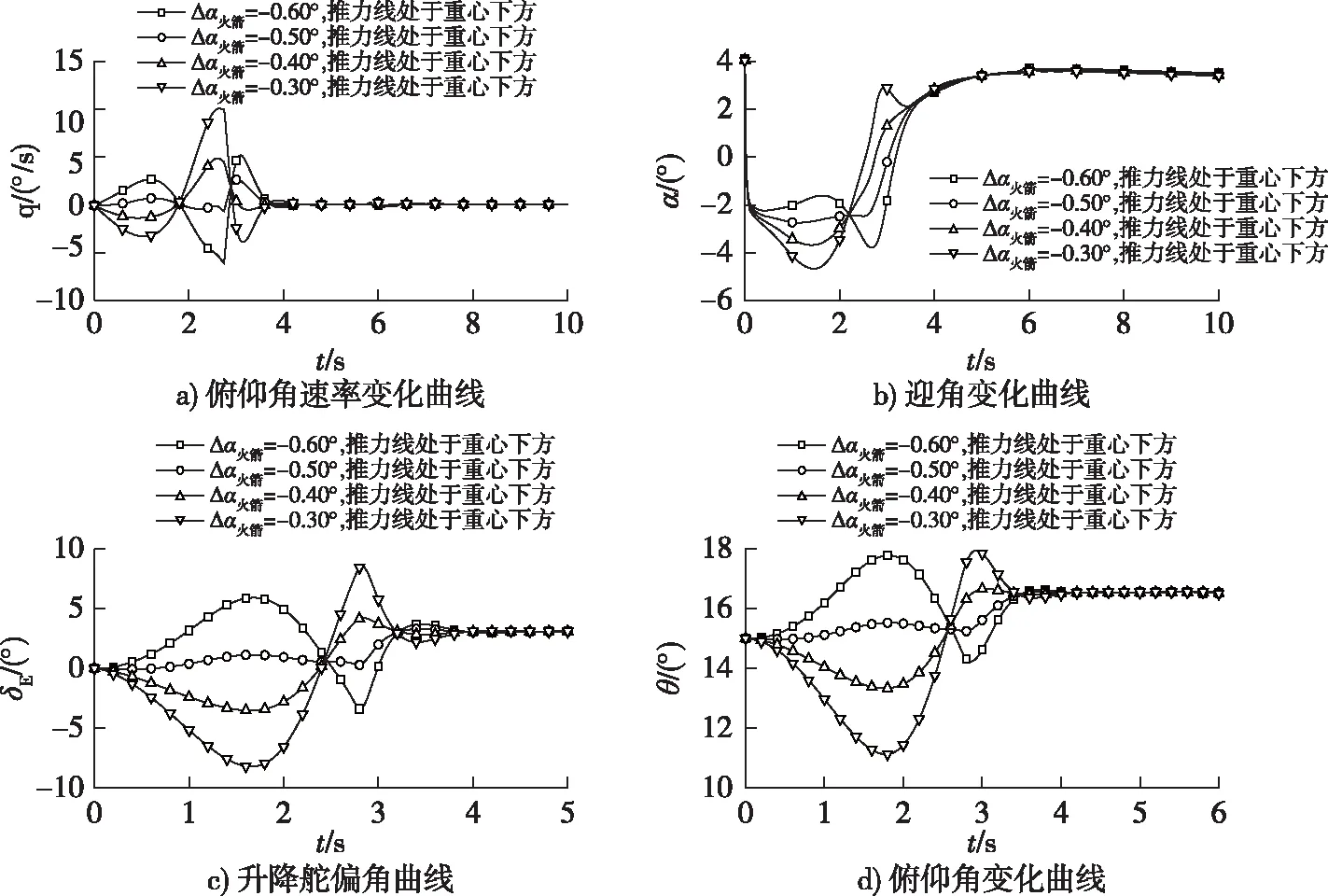
图4 不同负夹角下无人机飞行状态变化曲线
4.2 火箭推力线横向偏差范围
火箭推力线横向偏差是指火箭实际推力线与过组合体重心推力线之间存在左右偏差,经过组合体重心左侧或右侧,因此会导致无人机在发射过程中产生滚转和偏航。对于高速无人机来讲,一般采用小展弦比的气动布局,这就导致无人机的横侧向转动惯量要比俯仰转动惯量和偏航转动惯量小很多倍。无人机对横侧向扰动十分敏感。从图5仿真曲线可以看出推力线横向偏差0.5°时,虽然最终可以将滚转角稳定到0°左右,但是在起飞1 s后滚转角达到了28°,副翼偏角达到了19°接近23°舵机电限位。
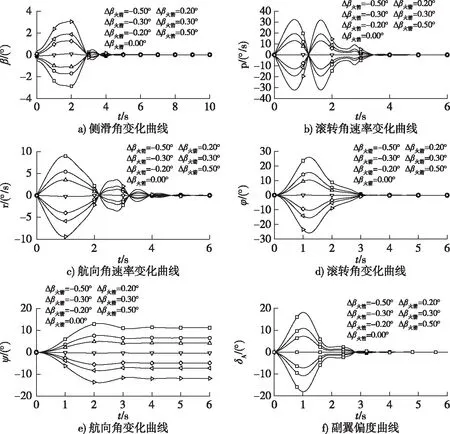
图5 不同推力线横向偏角影响曲线
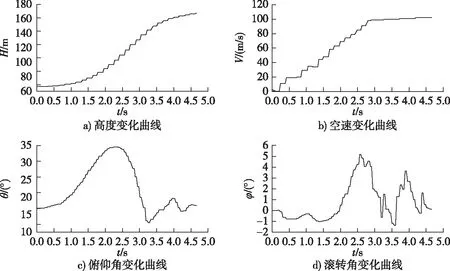
图6 试飞无人机发射段状态曲线
5 试验结果分析
本文在对仿真结果进行充分分析的基础上,结合实际工程经验,将某型无人机的助推火箭安装角为15°,发射角为16°。推力曲线向下偏-0.6°。实际发射曲线如图6所示。火箭实际工作时间约为2.8 s,火箭工作结束后飞行速度达到98 m/s,基本满足设计指标,由俯仰角变化曲线可以看出,在火箭工作前2 s由于空速较低舵面效率低,无人机和火箭的组合体受到火箭推力线偏差引起的俯仰力矩的作用,俯仰角不断增大,最大达到了33°,2 s以后舵面效率逐渐上升,俯仰角逐渐下降最终稳定在15°左右,整个发射段滚转角变化较小,最大值约5°,基本满足发射指标要求。通过实际发射试验验证了发射系统的基本性能,通过与仿真数据对比可以看出,推力线下偏-0.5°俯仰角在发射初段增加过快,因此在后续发射过程中将推力线调整为下偏-0.4°。
6 结束语
本文设计了某型无人机火箭助推发射系统,该系统采用零长倒伏式发射架,该发射系统满足发射需求,质量较小,便于机动发射,通过对发射过程进行受力分析,在建立发射过程数学模型的基础上,编写了仿真程序,研究了安全发射条件。结合工程实践对某型无人机发射参数进行了选取,实际飞行数据表明,设计参数合理,满足无人机火箭助推发射需求。
猜你喜欢
宇航学报(2023年5期)2023-06-25 01:13:08
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:08
军事文摘(2021年16期)2021-11-05 08:49:20
军民两用技术与产品(2021年10期)2021-03-16 06:05:02
装备维修技术(2020年17期)2020-12-28 09:40:27
国防科技工业(2020年1期)2020-01-16 07:03:28
中学课程辅导·教育科研(2019年3期)2019-09-10 01:00:12
军营文化天地(2017年7期)2017-09-25 07:43:44
高中生·天天向上(2017年4期)2017-06-09 02:16:12
疯狂英语·新策略(2017年8期)2017-05-31 08:13:22