基于红外量测信息的目标机动估计方法
2019-08-21 08:44:36王炎舜
指挥控制与仿真 2019年4期
栗 飞,王炎舜,龚 铮
(1.海军驻洛阳地区军事代表室,河南洛阳 471009;2.中国空空导弹研究院,河南洛阳 471009)
红外制导导弹由于其测量器件的限制,只能得到弹目视线角及视线角速度测量信息,而现代制导律为了改善制导回路的性能,通常需要目标的机动信息。因此,提高目标机动估计精度,已成为制约红外制导导弹性能提升的核心问题。
基于角量测量的状态方程与量测方程存在非线性关系[1]。但若采用扩展Kalman(EKF)与粒子滤波(PF)技术等非线性估计方法,又极大地增加了模型的复杂性与运算量。因此,还需进一步研究以线性模式为基础的目标机动估计算法[2]。针对上述问题,本文设计了一种递推的Kalman滤波器,通过构造惯性空间视线角估值残差,进一步得到弹目相对位置的线偏差,实现对目标机动信息的精确估计,并通过仿真验证了算法设计的正确性。

图1 运动模型示意图
1 卡尔曼滤波器

由于导弹自身的位置、速度、加速度可由捷联惯导获得,因此Kalman滤波观测器中只考虑选取3个状态[3],即
(1)

系统状态方程为

(2)
(3)
卡尔曼滤波由增益更新方程和状态更新方程两部分构成[4],卡尔曼滤波的相关方程为
协方差预测方程

(4)
状态预测方程
xk/k-1=Φkxk-1+Gkuk-1
(5)
增益运算方程
Kk=MkHT(HMkHT+Rk)-1
(6)
协方差估值方程
Pk=(I-KkH)Mk
(7)
状态估值方程
xk=xk/k-1+Kk(zk-zk/k-1)=
Φkxk-1+Gkuk-1+Kk(zk-HΦkxk-1-HGkuk-1)
(8)
进一步展开有
(9)
其中,

2 基于红外制导的线偏差量测方程

图2 弹目相对关系示意图
由图2,可以得到

(10)
取R≈R*则上式可表示为

(11)
其中,q为导引头视线角的量测值,可直接得到。
(12)
红外制导导弹近距格斗场景下,目标速度沿弹目视线方向的变化量较小,进行简化运算,即

(13)
式(13)中,R*的初值R0、目标沿视线方向速度初值VxT-Los0由载机提供,并设在整个飞行过程中VxT-Los=VxT-Los0,Vxm-Los根据捷联惯导输出的导弹速度、姿态以及导引头输出的高低、方位角计算,t0为导弹发射初始时间、tf为导弹自主飞行时间。
将式(12)(13)求解结果代入式(11),可得到弹目相对位置yk。
3 仿真验证
本文建立了包含目标运动及简化导引头稳定平台动力学的制导系统仿真模型,如图3所示。仿真中设定导弹初始发射速度为Ma=0.8,正尾后攻击目标,发射时刻弹目距离为3 km,目标速度为Ma=0.8,发射后以aTc=6 g的加速度作常值机动(机动时间常数Tt为1 s)。

图3 仿真模型示意图


图4 导引头仿真模型
卡尔曼滤波所需的弹目相对位置、相对速度等状态量由飞行任务装订信息获得;量测量由导引头输出的失调角、框架角,弹载捷联惯性输出的姿态角,以及弹目距离估值信息等构建,Kalman滤波通过迭代运算,完成对目标机动等状态的估计[6]。在仿真中,设定加速度初值aT0为零,设定过程噪声10 000(m/s2)2,量测噪声0.01 m2,图5~图7给出了对目标机动过载、相对速度及相对距离估计结果。

图5 目标加速度估计结果

图6 相对速度Vy估计结果与估计误差

图7 相对位置y估计结果与估计误差
4 误差与鲁棒性分析
计算模型的核心是对距离R*的估计,因此需分析R*的误差对估计误差的影响。取误差模型如下
其中k为比例误差系数,可以由计算模型误差、量测误差等带来。R0为距离递推的初值误差。
取ΔR0=0,k=1.1、0.9,其余仿真条件保持不变,由图8~图10给出的仿真结果可知,当R*存在±10%误差时,状态估计误差基本也接近10%,两者基本是等价的。

图8 距离比例误差条件下目标加速度估计结果
图9 距离比例误差条件下相对速度估计结果与估计误差

图10 距离比例误差条件下相对位置y估计结果与估计误差
ΔR0为距离递推的初值误差,由载机在发射初始时刻提供给导弹,假设
ΔR0=kR0R0
kR0表示初值误差相当于初始距离的系数。本例中R0=3 km,设kR0=0.1,则初值误差ΔR0=300 m。其余仿真条件保持不变,由图11~图13给出了Kalman滤波估计结果。
由图11~图15可见,初始距离装订误差对Kalman滤波器估计结果的影响是非常大的。尤其在弹道末端,会造成滤波器发散。因此,采用该算法的前提是载机可以提供较为准确的弹目距离初值。

图11 初始距离误差条件下的目标加速度估计

图12 初始距离误差条件下的相对速度Vy估计结果

图13 300 m初始距离误差条件下的相对速度Vy估计误差
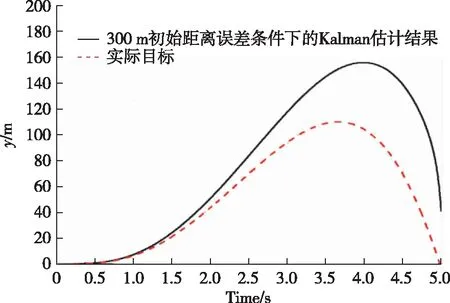
图14 初始距离误差条件下相对位置y估计结果

图15 300 m初始距离误差条件下相对位置y估计误差
5 结束语
本文提出了一种利用红外导引头测角及递推估计线偏差进行目标机动估计的方法,并进行了仿真验证。仿真结果表明该方法能够实现对目标机动、弹目相对位置及相对距离的精确估计,能够满足红外制导导弹对目标机动及弹目相对运动信息的估值要求。
猜你喜欢
舰船电子工程(2023年8期)2023-11-15 06:51:08
数学物理学报(2022年1期)2022-03-16 06:15:04
空间科学学报(2020年1期)2021-01-14 00:53:28
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
兵器装备工程学报(2017年4期)2017-04-28 01:12:28
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
制导与引信(2015年3期)2015-04-20 00:44:22
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06