
三维激光扫描技术在桥塔监测上的应用
2019-08-20 06:59贺志勇欧阳俊峰邱艳芳林伟彬
筑路机械与施工机械化 2019年7期
贺志勇,欧阳俊峰,邱艳芳,林伟彬
(1.华南理工大学 土木与交通学院,广东 广州 510641;2.广州市承信公路工程检验有限公司,广东 广州 511483)
0 引 言
经过三十多年的公路基础设施建设,中国已经进入“建养并重”的阶段,步入维修期的桥梁日渐增多。据资料统计,中国危桥达9万座,占公路桥梁总量的15%,大量现役桥梁亟需进行安全监测。在桥梁长期的运营中,桥塔作为承重结构,存在诸多安全问题:竖向不平衡荷载引起横梁与塔身连接处开裂,地震、强风等横向荷载影响其稳定性;还有塔基桥墩的沉降会引起桥塔的位移[1]。因此,桥塔的变形一直是重点监测之一。目前,常用的桥塔监测手段主要有全站仪和传感器:全站仪的精度高,但需要安装棱镜,测点数量有限,难以反映桥塔的整体变化;传感器精度和灵敏度高,但成本也高,需预先安装,不适用于旧桥、危桥[2-4]。三维激光扫描技术有非接触、高密度、数字化等特点,以格网扫描的方式[5-6]获取桥塔整体表面的三维数据,能“以面代点”、整体连续地反映、分析变形量,给老旧桥梁的安全监测提供了新的方法。
目前,三维激光扫描技术应用于桥塔的长期监测还比较少。伊晓东等在悬索桥塔的施工中运用三维激光对桥塔进行扫描,通过点云的切片分区获得多个剖面的9个特征点,与设计值对比从而完成线型监控[7];徐进军在单站点对桥塔进行了荷载试验,利用散乱点云获取了特征棱线扁平化的位移,并且在桥面挠度试验中对比了RANSAC最小二乘拟合法和重心法之间的精度[8]。可见,三维激光扫描技术在桥塔的变形监测上具有很好的可行性和广阔的发展前景,但在现役桥梁长期变形监测方面的应用还需进一步研究。
本文针对一座投入运营13年的斜拉桥,提出了基于三维激光扫描长期和短期的监测方案。首先配合全站仪扫描标靶球,验证三维扫描仪的精度;然后建立控制网,布设扫描站点,进行为期半年的桥塔挠度监测。在数据处理方面,对散乱点云进行Delaunay三角网格化曲面重构,提取能反映桥塔变形的特征棱线,得到该桥塔半年内以及其中某天的挠度变化情况。
1 三维激光扫描技术
1.1 扫描原理
三维激光扫描的核心技术是激光测距,它分为脉冲式测距、相位式测距和激光三角法测距。本文研究所用Faro Focus3DX330扫描仪采用相位式激光测距技术,通过测量回波信号和发射信号的相位差实现测距,仪器在100m的距离内精度可达±2 mm。其中双频连续波相位差公式如下。
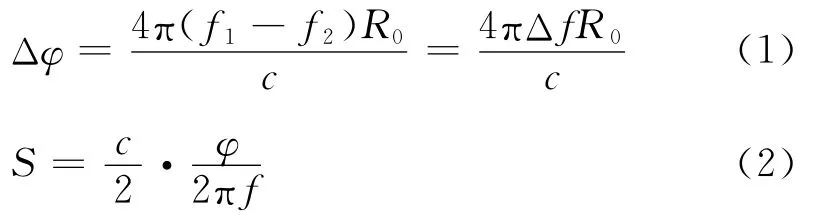
式中:φ为相位差;f1和f2为发射波的2个频率;R0为目标初始距离;c为光在大气中的传播速度;S为所测距离。
点云数据一般以扫描仪内部激发点为原点,其目标点的空间坐标如图1所示。其中θ和α为竖直角和水平角,经过内部编码器可以组成一个球坐标(S,θ,α),然 后 转 换 成 直 角 坐 标 P(XS,YS,ZS)[9-10],见式(3)。
1.2 相关软件
Faro Scene是美国Faro系列三维扫描仪配套的点云预处理软件,在Scene中可观察并操作不同坐标系下的点云,根据标靶球或特征物进行拼接,完成初步数据整理。
Geomagic Qualify是美国Raindrop公司开发的适用于逆向工程的检测软件。该软件能对点云数据进行过滤、拼接、封装、对齐等处理,曲面重构的核心算法为Delaunay三角网格化,将网格化模型之间的对比用直观易懂的色谱图表达,并可根据3D、2D的分析结果和几何尺寸标注生成自动化报告[11]。
2 数据采集
西丽大桥位于广州市番禺区南郊,呈南北走向,为不对称钢筋混凝土混合体系独塔单索面斜拉桥,见图2。桥塔高43.88m,为H型截面;主桥长150m,纵向分跨为30m(钢箱梁)、80m(钢箱梁)、40m(混凝土箱梁),于2004年通车。桥塔通过4根拉索承担主跨自重和部分行车荷载,在不同荷载下会产生不同挠曲,因此桥塔的几何形态变化能反映桥塔结构受力的变化情况。
随着交通量与日俱增,为确保桥梁安全运营,该桥亟需进行安全监测。该桥塔顶端并未设置反射棱镜,无法采用全站仪等传统方法直接观测,因此采用Faro Focus X330三维激光扫描仪(标称25m内点位精度为±2mm)进行桥塔挠度监测。
2.1 监测方案

图2 西丽大桥立面
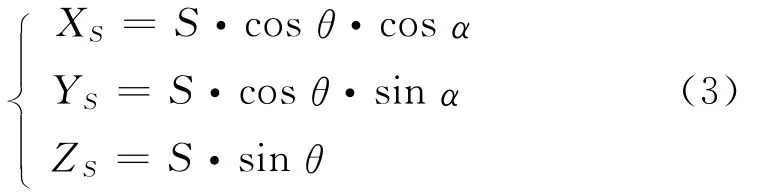
长期监测分别在2017年3月中旬至8月中旬完成,共计6次。受现场条件和仪器续航的限制,设计图3所示的监测方案:扫描站点布设在桥面人行道A、B、C三点,4个标靶球均固定于桥塔附近的附属设施,用于后续各站点云的拼接;站点距桥塔顶端约50m,距塔底约20m,距4个标靶球均为10~20m。
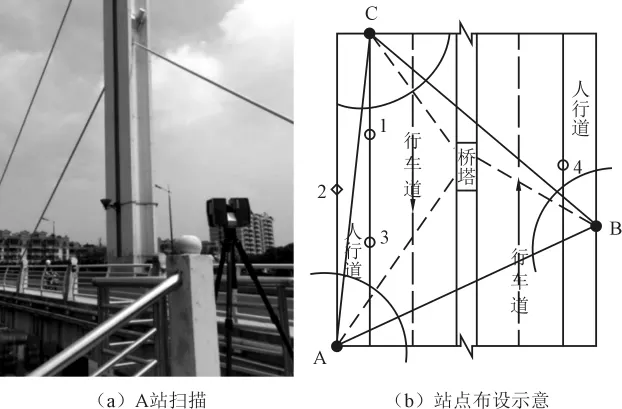
图3 桥塔长期监测
为提高扫描效率和精度,按1∶1及4倍质量提升分辨率,并根据实际需要设置扫描范围的水平角和竖直角,将每站扫描时间控制在0.5h以内。
为了能更微观地监测桥梁在一天内的运营情况,在5月27日进行1次全天候的短期监测。分为4个时间段进行扫描:凌晨6时、中午12时、下午18时以及次日0时。根据当日现场交通量可知各时段桥梁工况大致为空载、半载、满载及空载;当日体感温度约25℃,无持续风向微风。短期监测仅在A站进行扫描,其余条件与长期监测保持一致。
2.2 精度验证
为确保三维激光扫描仪对标靶球扫描的精度,在正式扫描前采用全站仪辅以TSP系统进行精度验证。TSP系统包括双棱镜基座和同心棱镜标靶球[12],标靶球能同时被2种仪器识别并提取球心坐标。经过基座的换算,可将全站仪的坐标系与扫描仪的坐标系统一,完成球心坐标的核对。
具体操作如下:将1个同心棱镜标靶球放置于人行道上,距扫描仪20m,以贴合实际监测距离;以全站仪读出的双棱镜基座和棱镜标靶球坐标为基准,计算出扫描仪激发点和标靶球的相对位置;然后用扫描仪对棱镜标靶球进行5次扫描,求得球心坐标误差,结果见表1。经计算,点位中误差为4.0 mm,高程中误差为0.7mm。由规范可知,该三维扫描仪对点云的测量精度满足等级三的要求(变形观测点的点位中误差不大于6mm,高程中误差不大于1mm),可对大型桥梁实施长期监测。
表1 验证标靶球心坐标精度 m
3 数据处理
3.1 预处理
由于桥塔的初始点云数据在空间上非常庞大,并含有大量冗余点和噪点,需要进行滤波和配准;因此在配套软件Scene中手动删除冗余部分后,再将三站的点云进行基于标靶球的识别与配准,处理结果如图4所示。将每期点云导出为独立的XYZ格式文件,进入后处理。
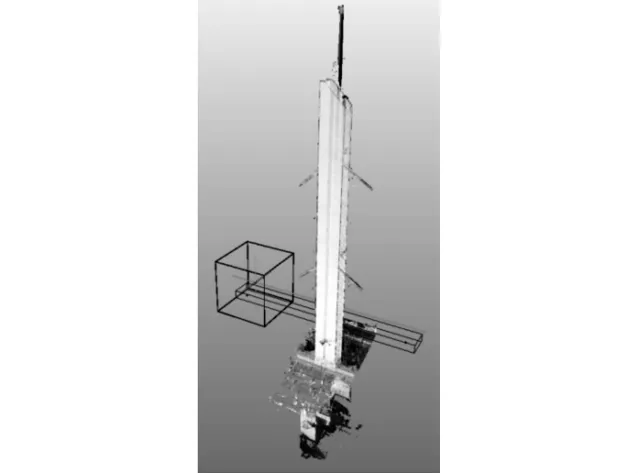
图4 预处理后的桥塔点云数据
3.2 后处理
为反映桥塔在挠度上的变化,选取点云数据中的3条特征棱线a、b、c作为研究对象计算挠度值;但特征棱线的点云并不能精确落在棱线上,而是落在棱线附近,所以需要先进行提取。
观测物特征点云的提取可采用2种方法:一是直接利用散乱点云边界特征进行提取,该方法虽过程简便,但精度较低;二是将散乱点云经过三角网格化后,形成有拓扑关系的封闭模型再进行提取,该方法过程繁杂,但精度较高[13-14]。Qualify中所提取的棱线属于第二种方法,在三角网格化中,点的领域点集中构造出包含该点的“一圈”三角形的单复型,通过距离场的梯度流得到子复型。由子复型以此类推,生长成一个包含所有点云的三角网格模型。
在长期监测的模型对齐中,将每期桥塔模型以M1~M6命名,对应于3~8月的三角网格模型。它们分别根据前一期的模型为参考作对齐,如“M1M2”是以M1作参考模型,以M2作对比模型。
由于本次试验扫描的对象刚接在桥面上,故拟定桥塔与桥面相接部分为固定不动,在其上生成若干的特征线和特征平面,使2个模型对齐到同一坐标系下进行对比。令桥塔横梁处为原点O,横桥向为X方向,顺桥向为Y方向,竖直向为Z方向。短期监测同理,以m1~m4的顺序命名,对应于6时到次日0时的三角网格模型。m1m2对比结果如图5所示。
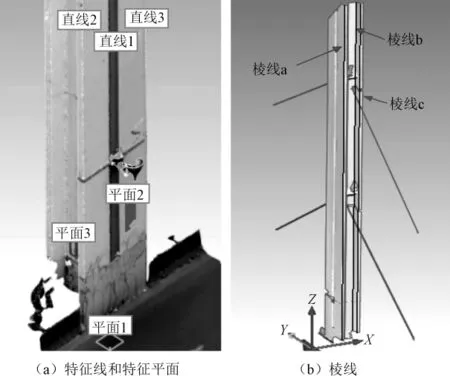
图5 m1m2桥塔对比结果
在Qualify的处理中,建立的2个模型的偏差色谱图有3种情况:3D偏差、定向偏差、平面偏差。因为此模型没有“同名点”的概念,无法直接计算变量[15],故采用3D偏差测试模型上任意点到参考模型上的最短距离,更符合空间上的偏差。利用空间平面与桥塔相交标定3条棱线,沿Z轴(桥塔竖直)方向每隔2m生成1个剖面,每个剖面上棱线在X和Y方向的偏差值即为该方向的挠度值。应注意的是,每次偏差值应该叠加累积,最终形成累计观测的结果。其中,m1m2的3D对比中42m处剖面的偏差如图6所示。
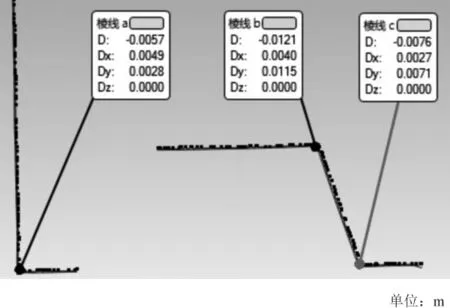
图6 m1m2对比中42m处的偏差值
4 结果分析
由于点云获得的偏差值呈折线状,故需对其进行二项式曲线拟合。为使拟合准确,多项式的阶数k可根据AIC准则确定[16]:在线性模型的拟合中,选择使AIC值达到最小的变量子集为最优模型。式中:AIC为AIC的值;k为多项式阶数;n为折线上参与拟合的点数;S为拟合的残差平方和。

当由AIC原则确定的阶数k=2时,AIC值最小,桥塔棱线拟合效果最优。此时各条棱线拟合的中误差控制在3mm内,如表2所示。
表2 三条棱线挠度拟合的中误差 mm
4.1 长期监测结果
以3月首次扫描的模型M1为基准,综合分析6期模型的3条桥塔棱线在X和Y方向的挠度,如图7、8所示。从整体上来看,3条棱线的斜率都非常接近,说明桥塔在拉索与桥面荷载的影响下呈整体摆动,具有较好的几何变化相似性与一致性。
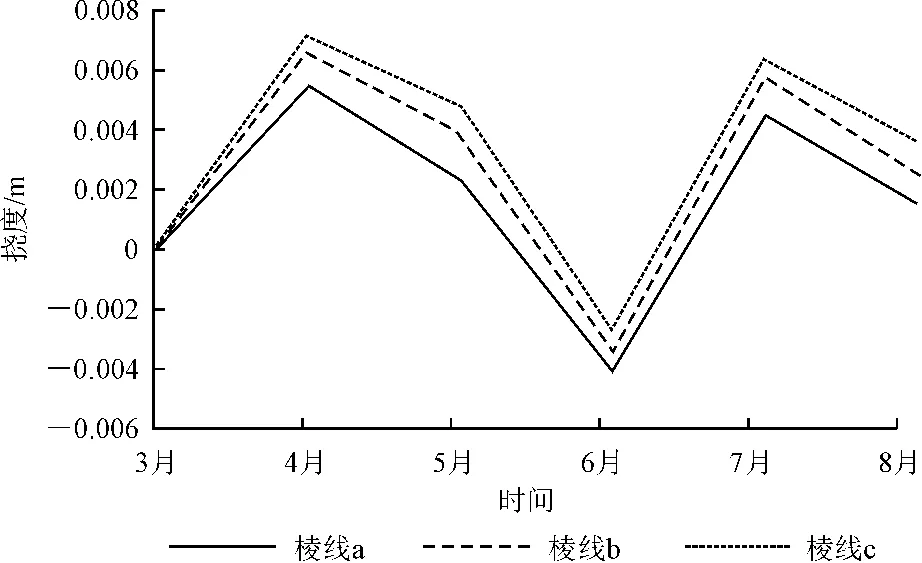
图7 桥塔X方向长期监测结果
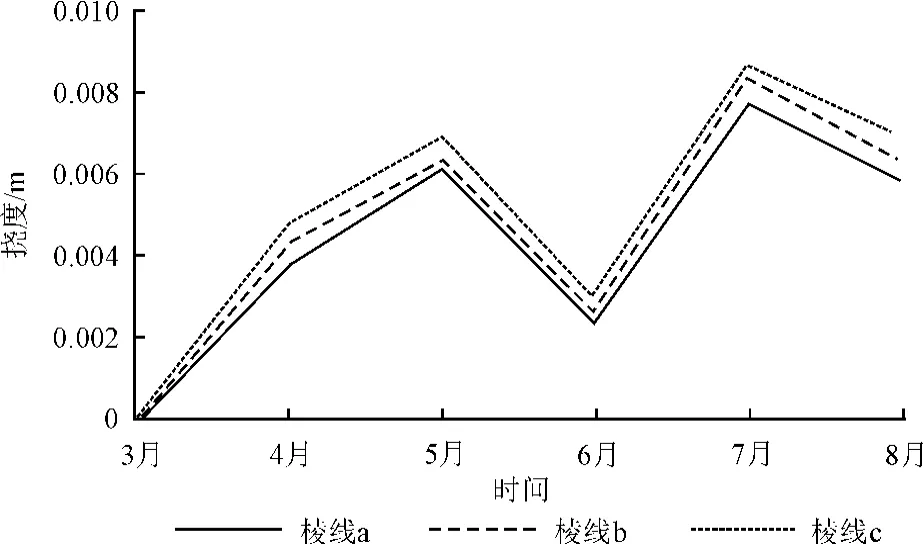
图8 桥塔Y方向长期监测结果
对于横桥X方向而言(图7),3~8月的桥塔棱线挠度在0附近呈增长和回调的变化,幅度均在8 mm内,没有明显积累于一个方向的趋势,故其稳定性较好;在6~7月之间挠度变化最大,3条棱线均在8mm以上,其中以棱线b为最大(9.3mm),倾斜角约为44″。
对于顺桥Y方向而言(图8),3~8月的桥塔棱线挠度仅在0以上增长和减少,幅度均在9mm以内,说明桥塔仅向主跨挠曲;仍以6、7月之间挠度变化最大,3条棱线均在5mm以上,其中棱线b为最大(5.8mm),倾斜角约为27″。综上可知,6、7月份的交通量与日照等因素对该桥塔影响最大,但仍在允许范围内,证明桥梁处于健康运营状态。
4.2 短期监测结果
以6时扫描的模型m1为基准,综合分析4期模型的3条桥塔棱线在X和Y方向的挠度,如图9所示。由图9可知:当该桥塔挠度在凌晨6时至中午12时、中午12时至下午18时呈正向增加,ΔX和ΔY幅度均在6~7mm,倾斜角约为41″;而在下午18时至次日0时呈反向回调,幅度均在5~6 mm,倾斜角约为35″。在下午18时看作满载的工况下,桥塔顶部最多累积顺桥向挠度约为15mm,横桥向约为10mm,倾斜角约为1′10″。以上结果说明,桥塔挠度随着交通量的起伏在顺桥向和横桥向有增长和回调,且为正相关连续变化的曲线。
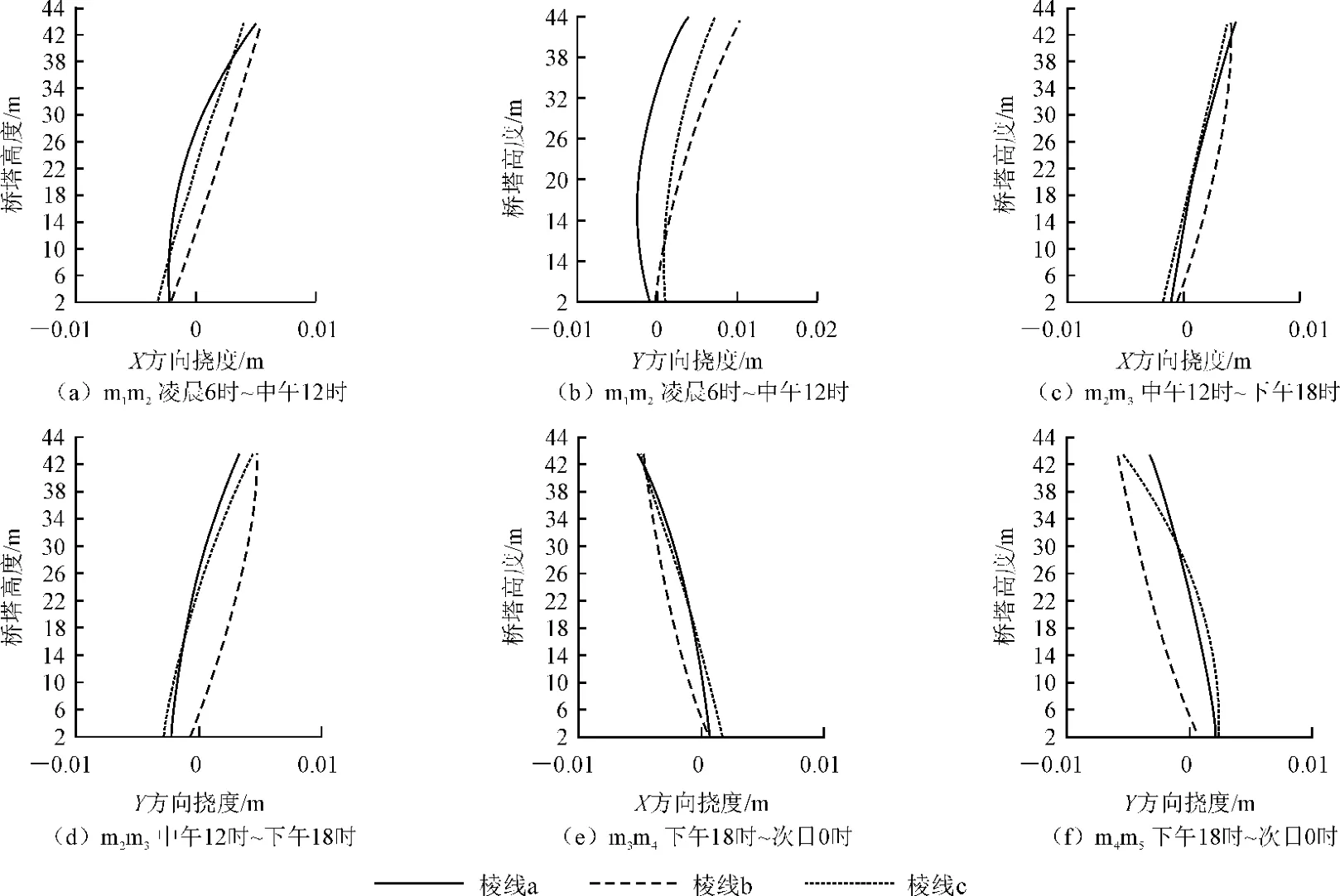
图9 短期监测各时段棱线的挠曲程度
此外,以图9(a)为例,棱线a和棱线c存在交点,说明2条棱线在X方向上偏移程度不同,可能存在一定塑性形变;而在桥塔2m处已有约-3mm的偏差,不排除在扫描或对齐阶段存在一定误差,但都在可接受范围内。
5 结 语
利用三维激光扫描仪技术快速、高效地获得了西丽大桥桥塔的3条棱线在横、顺桥向的变化情况,解决了桥塔无预制反射棱镜与测点有限的问题,完善了该桥的健康监测手段,可供类似工程参考借鉴。
该仪器对20m距离下标靶球的点位精度可达4mm,可以对大型桥梁实施长期变形监测。分析西丽大桥在长期监测与短期监测下的试验结果,可以得知以下变化规律:该桥桥塔随着交通量、日照等因素的变化始终保持轻微的动态挠曲,在6~7月受外界影响最大,而在下午18时挠度累计值达到最高,所有摆动幅度均在10mm以内,桥塔变形在合理范围内,健康状况良好。
三维激光扫描技术凭借着高精度、便捷性和非接触等优势,整体而连贯地获取桥梁表面数据,为未来桥梁长期的变形监测提供了新的方向。但是,点云数据各自独立的处理流程增加了不稳定性与复杂程度,因此还需要完善处理流程并开发适用于变形监测的数据处理软件;此外,该技术可应用于不同桥型或不同结构的扫描,可充分利用其变形与病害等信息支撑起桥梁BIM模型,为BIM技术提供可视化的方案。
猜你喜欢
模具工业(2023年1期)2023-02-10
建筑机械化(2022年7期)2022-07-29
锻造与冲压(2021年22期)2021-11-30
锻压装备与制造技术(2021年3期)2021-08-13
装备制造技术(2020年1期)2020-12-25
铁路技术创新(2020年6期)2020-02-25
工程与建设(2019年5期)2020-01-19
测绘工程(2018年3期)2018-03-20
山西交通科技(2016年4期)2016-11-15
测绘学报(2015年4期)2015-01-14
