高速公路上车辆突发事故警报系统设计★
2019-08-05 01:25毛一鸣巴兴强吴德鸿秦佳琪戚成功吕思昂林晓晖
山西建筑 2019年11期
毛一鸣 巴兴强 吴德鸿 秦佳琪 戚成功 吕思昂 林晓晖
(东北林业大学交通学院,黑龙江 哈尔滨 150040)
近年来我国高速公路建设飞速发展,但是配套的智能化管理设施没有跟上,导致高速公路交通事故时有发生[1],有时还伴有“二次事故”发生,对人身生命安全造成重大伤害。为了提高驾驶员获取前方突发事故信息的速度,从而对前方的事故信息进行一个预知的处理行为[2],保证高速公路的运输能力,增加公路的通畅性、降低“二次事故”的发生率。车辆突发事故警报装置可以收集车辆自身的姿态数据和空间位置,并实时监测车辆自身安全状态[3]。当车辆出现交通事故时,将事故车辆的地理位置传递给智能移动终端,基于这些功能要求,本文提出一种车辆突发事故报警系统的设计方法。
1 系统框架设计
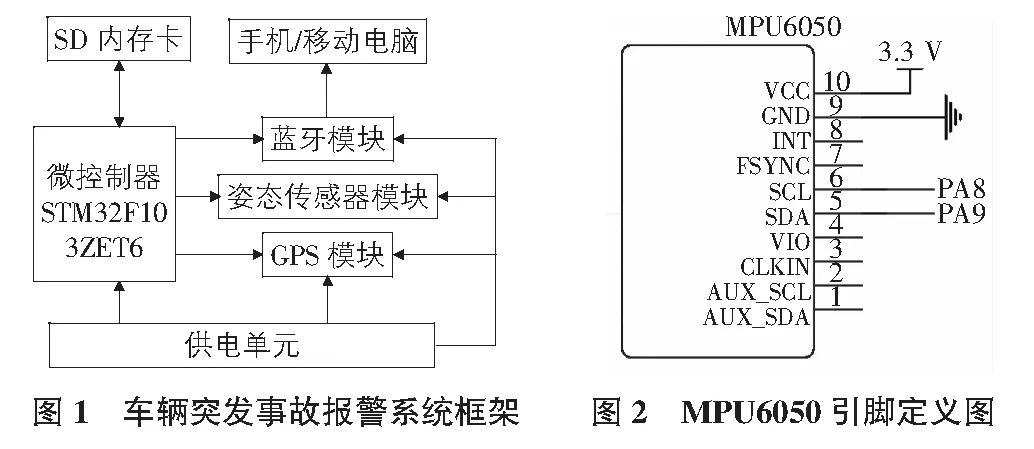
车辆突发事故报警系统框架如图1所示。该系统由微控制器模块、姿态传感器模块、GPS模块、蓝牙模块、SD卡模块、电源模块组成。整个系统工作原理为:微控制器首先通过姿态传感器模块、GPS模块采集车辆当前姿态和空间位置,通过与车辆正常行驶状态下的姿态信号进行实时比对,当车辆不再满足正常行驶状态下姿态信号时,判断车辆为事故车辆,然后通过蓝牙向智能移动终端传递GPS信号,从而利用智能移动终端的4G网络将事故车辆的位置信息公开至附近的驾驶员,并为附近的驾驶员提出事故预防止高速公路上“二次事故”的发生。
2 硬件设计
微控制器是系统控制核心,由于车辆突发事故报警系统需要汽车空间姿态信息解算、GPS信号的获取以及无线通信信号的发送和接收,对于系统的实时性要求很高,且系统运算大,因此选择意法半导体的STM32F103ZET6芯片(Cortex-M3内核),该芯片有512 KB片内FLASH,64 K片内RAM,最高允许频率达72 MHz,片内多达11个计数器,从而可满足系统设计要求。
姿态传感器采用InvenSense公司的一款6轴姿态传感器模块MPU6050,它集成了一个3轴陀螺仪和一个3轴加速度计,辅助I2C端口以及一个数字运动处理器(DMP)[4],拥有16位模/数转换器,将三轴陀螺仪及三轴加速度计数据转化为数字信号,其工作电压为2.5 V~3.5 V。MPU6050引脚定义如图2所示。利用MPU6050芯片内部的DMP模块(数字运动处理器),可对传感器数据进行滤波、融合处理[5],它直接通过I2C接口向主控器输出姿态解算后的姿态数据,可以降低主控器的运算量,减少功耗,其姿态解算频率最高可达200 Hz[6]。通过微控制器STM32的I2C驱动,对MPU6050传感器的寄存器读取内容则可获取测量数据,在硬件设计过程中,将MPU6050传感器置于硬件设备的中心坐标处。
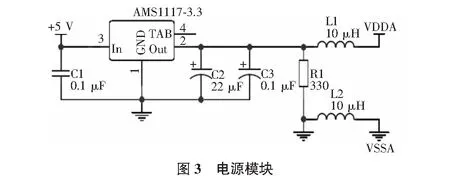
供电单元为整个系统提供稳定的电源,供电电路如图3所示。
此系统中采用5 V锂电池供电,而硬件设备中要求+5 V和+3.3 V的电源,因此需要设计电源转换电路,使用+5 V电源作为ASM1117-3.3 V稳压器的输入端,最大可提供1 A的电流值,电感L1和L2令模拟电源隔离,VDDA端输出+3.3 V模拟电源,VSSA端为模拟地。
GPS模块采用ALIENTEK生产的一款高性能GPS模块,以UBLOX公司的NEO-6M模组,自带陶瓷天线及MAXIM公司20.5 Db高增益LNA相片,该模块可通过串口进行各种参数的设置。其采用NEMA-0183协议输出GPS定位数据[7],并且可以通过UBX协议对模块进行设置。波特率为9 600,数据以ASCII码形式传输[8]。
3 软件设计
系统软件设计流程如图4所示。软件利用微信小程序开发平台,蓝牙信号接收模块,百度鹰眼服务模块。首先需要利用百度鹰眼来得到使用者当前的位置信息,小程序后端根据百度鹰眼所提供的定位信息在小程序界面首页显示出位置。当有车辆发生事故之后,通过手机自身蓝牙接收的GPS信号传输到微信小程序的后端,并显示到小程序的用户界面,并迅速提醒所在事故发生地附近2 km内的驾驶员。使其他驾驶员对该事故车辆进行及时的规避或援助。当驾驶员想要了解其他路况的信号时,立即调到百度鹰眼的远程观测,可以搜索到使用者想要了解的道路信息。

4 结语
本文进行了车辆突发事故报警系统的硬件电路和软件设计,并完成了车辆突发事故报警系统的研制,通过实际测试模拟汽车的碰撞,侧翻,侧滑等交通事故,系统达到了预期的功能实现,但仍存在可优化的问题,如如何提高事故信息鉴别的精度等。车辆突发事故报警系统的下一步完善和优化,能使其走向真正的实际应用与普及。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
学生天地(2020年3期)2020-08-25
中国信息化周报(2020年15期)2020-05-11
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2017年14期)2017-12-18
汽车文摘(2017年6期)2017-12-06
通信技术(2012年11期)2012-08-10