基于软启动控制的三相四线制有源电力滤波器
2019-07-31 03:38:34车志霞张朋飞
承德石油高等专科学校学报 2019年3期
车志霞,张朋飞
(1.衡水电气化铁路学校,河北 衡水 053000;2.石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043;3.中铁建电气化局集团北方工程有限公司,山西 太原 030053)
在我国低压配电系统中广泛使用的供电方式是三相四线制[1],在此供电方式下的主要电气设备均含电力电子器件,正是这些设备的使用,造成了电网谐波电流的产生。虽然这些设备单台功率小,产生谐波含量少,但是由于使用数量庞大,使得三相四线系统产生严重的谐波问题,对设备安全和用户正常用电造成威胁。同时这些设备应用在三相四线制系统,当三相负载不平衡时很容易使得中线电流过大,甚至烧毁中线,对系统安全造成严重威胁[2]。
因此,三相四线制系统中的谐波抑制、中线电流消除及三相电流平衡将成为三相四线制系统亟待解决的问题[3]。笔者以三相四桥臂有源电力滤波器为主要研究对象,用于治理三相四线制低压配电系统的谐波问题。
1 有源电力滤波器的结构设计
1.1 有源电力滤波器的工作原理

is=iL+ic=iLf+iLh-iLh=iLf
(1)
1.2 三相四桥臂有源电力滤波器数学模型
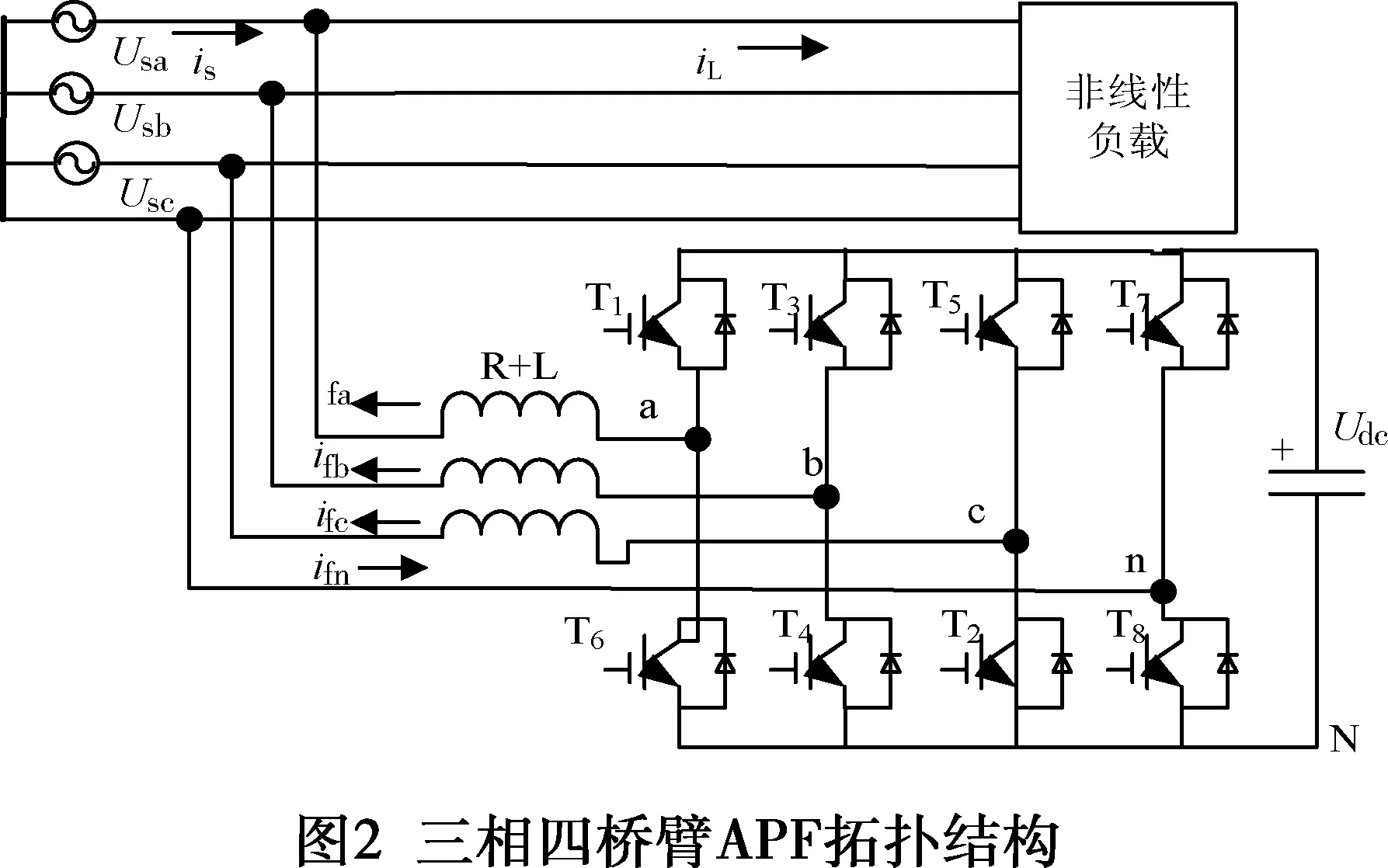
三相四桥臂APF结构如图2所示。其中T1~T8为8个IGBT和反向二极管组成的功率开关器件,L为主电路输出侧电感,电容C为直流侧储能原件。电压Ua、Ub、Uc、Un为APF主电路四个桥臂的中点相对于端点N的电位差,Udc为直流侧电容两端的电压,Usa、Usb、Usc分别为电网中的电源电压,ifa、ifb、ifc为APF主电路输出的补偿电流,ifn是中线电流。
因此,根据基尔霍夫电压和电流定律可以得到其在abc坐标系下的方程式(2):
(2)
将abc坐标系下数学模型转换到dq0坐标系时需要进行Park变化[6-7],其矩阵变换式为(3)。从而,可以得到四桥臂APF在dq0坐标系下的表达式为(4):
(3)
(4)
将式(4)在dq0坐标系下的数学模型用框图的形式表示,如图3所示。

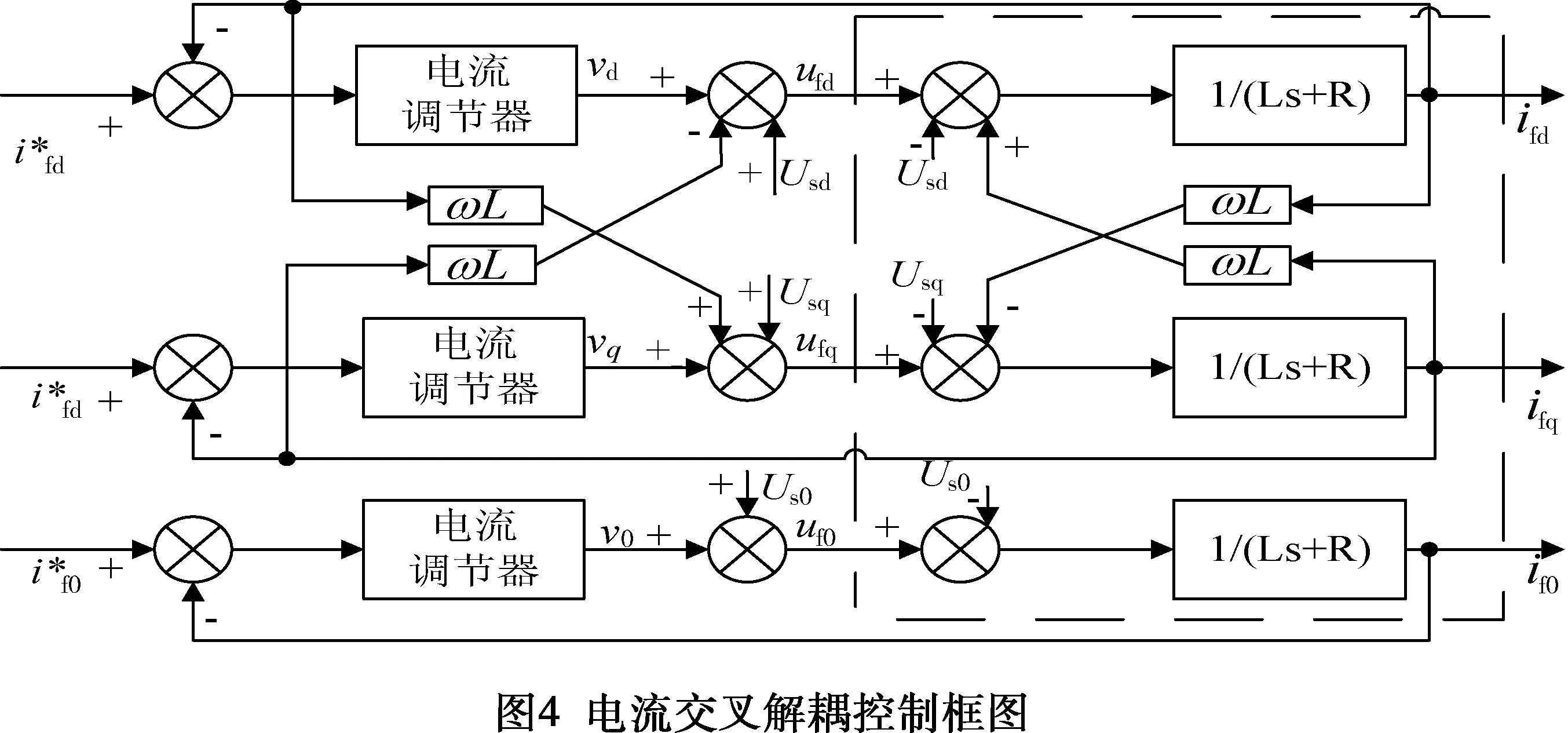
由图3知,三相四桥臂主电路的PWM变换器由两部分构成[8-9]。一部分是由d、q相互耦合的两个通道构成,即在d轴通道中存在q通道的参数关系,当任一轴参数变化时均会引起另一轴的参数变化;另一部分是由完全独立且与d、q轴无耦合关系的0轴通道组成。因此若实现各轴单独控制,则需进行解耦控制,通过使用被控对象if的反馈值和电源电压Us的前馈来达到各轴之间完全解耦的目的。图4为电流交叉解耦的控制框图。
明确了电流交叉解耦的控制方式后,需要确定谐波电流检测算法,本文使用优化的瞬时无功理论的检测算法,而在检测控制环节会用到电压环控制输出的变量。因此本节主要研究电压环控制对于三相四线制APF谐波补偿的控制效果。
2 电压环控制
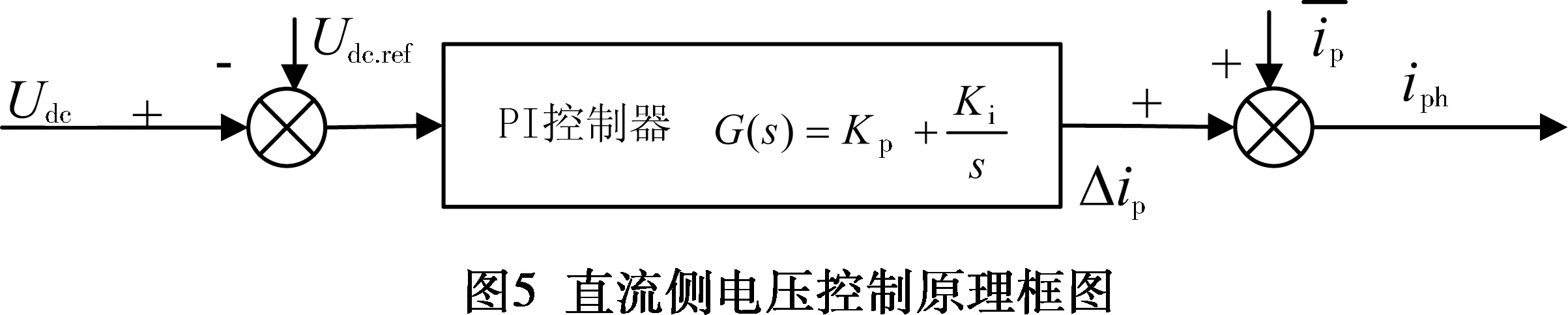
当明确了系统谐波电流检测以及电流环控制方式的基础上,需要确定电压环的控制。当电压外环使用传统PI控制方式时,其控制原理框图如图5所示。通过此控制方式可以实现维持直流侧电压稳定的目的[10]。
经理论分析,当有源电力滤波器直流侧仅使用PI控制时,在APF接入电网瞬间,会产生一个很大的冲击电压和冲击电流,从而对系统设备安全造成影响。因此,决定将软启动控制方式引入三相四桥臂APF的直流侧电压控制当中,在谐波补偿装置APF接入系统之前,通过限流电阻的接入,先对直流侧电压预充电,当电压达到一定值后,再切除限流电阻,之后接入APF,再利用PI控制维持直流侧电压的稳定。这样将软启动和PI控制联合使用,应用在四桥臂APF直流侧电压的控制中,能起到减小冲击电压、冲击电流,稳定直流侧电压的目的。如图6所示为直流侧软启动控制原理图。
在系统启动之前,三相交流接触器S1的触点断开,此时三相电源通过三相限流电阻给直流侧电容预充电,当充电一定时间后直流侧电压达到预定值,此时软件控制接触器S1触点闭合,使限流电阻短路,将APF主电路接入系统,电网电源继续给电容充电,并通过PI控制,维持直流侧电压的稳定。
3 仿真对比分析
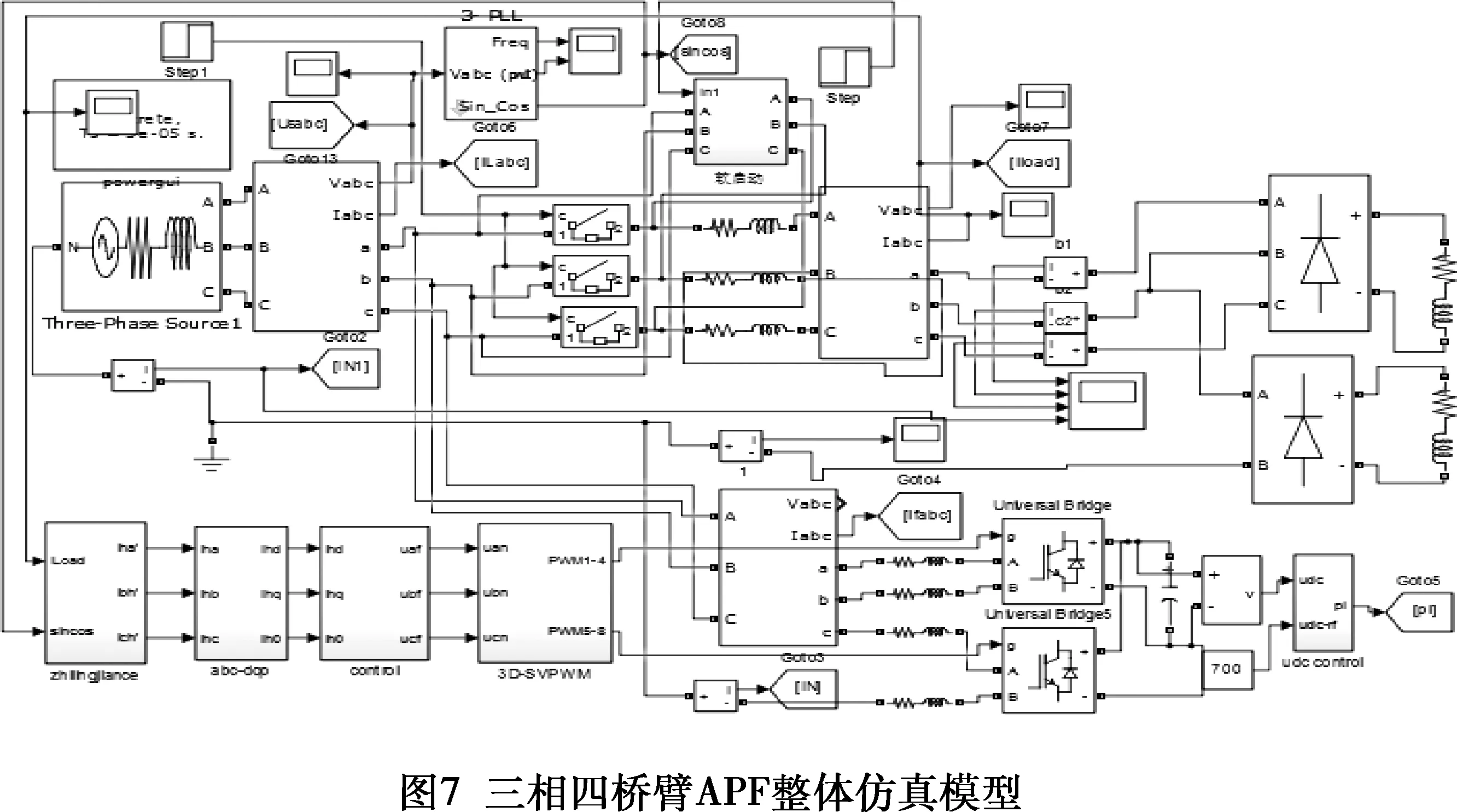
为了验证所选控制方式的控制效果,需要搭建整体仿真模型,并通过对单独PI控制和PI+软启动控制两种方式对比分析,从而确定更好的电压控制方式。本文搭建的仿真模型的谐波源为三相不平衡负载。本系统的部分仿真参数如下:电源为三相交流电,频率50 Hz;负载为三相不可控整流桥带RL负载,B相又连接了一个单相RL负载的整流桥;直流侧电压为700 V。如图7所示是APF整体的仿真模型。
3.1 单独PI控制仿真分析
在搭建的整体仿真模型下,直流侧电压只使用PI控制,当APF谐波补偿装置在0.035 s时刻接入系统。通过仿真可以得到图8的直流侧电压变化曲线。图9是在此控制下,最终得到的补偿后网侧电流波形。
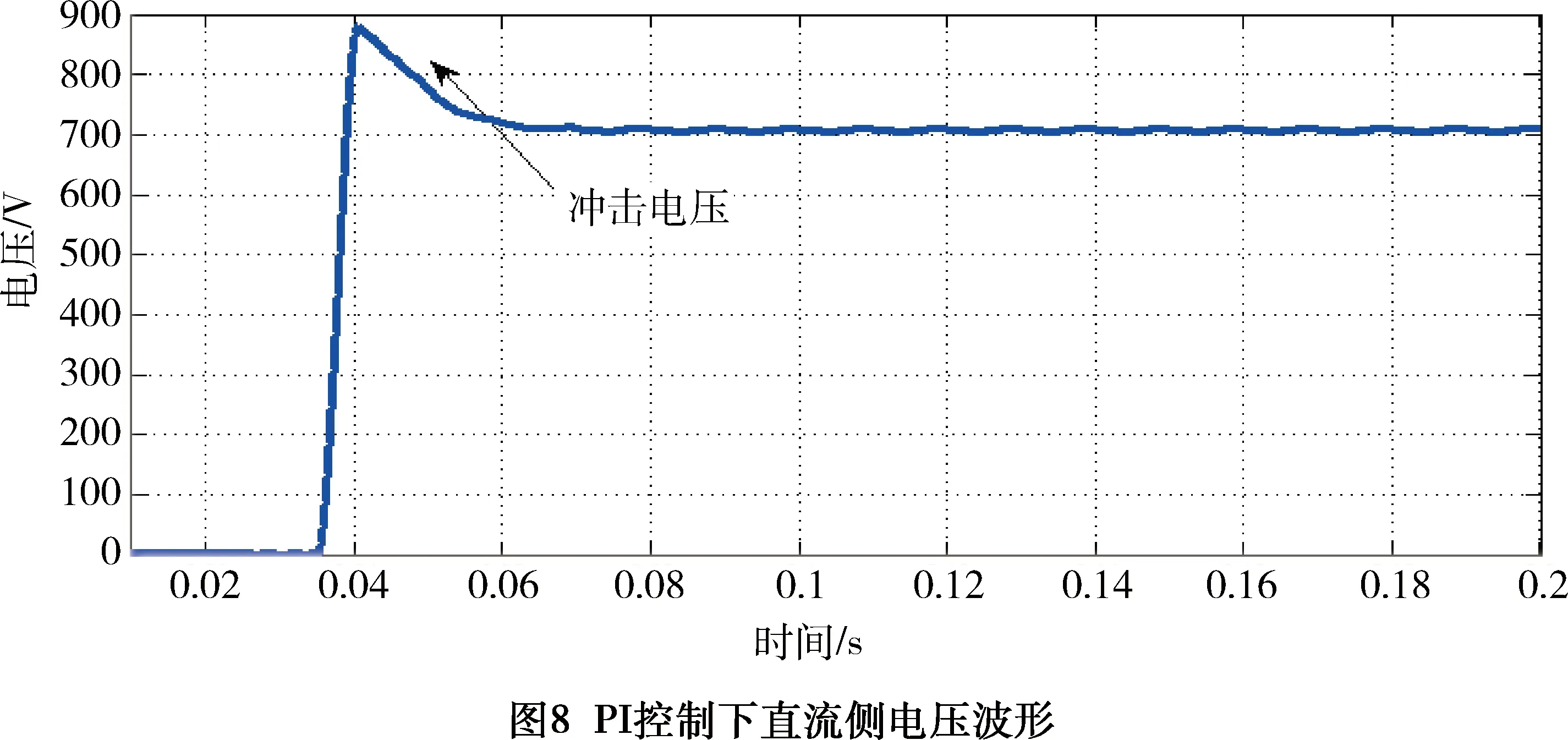
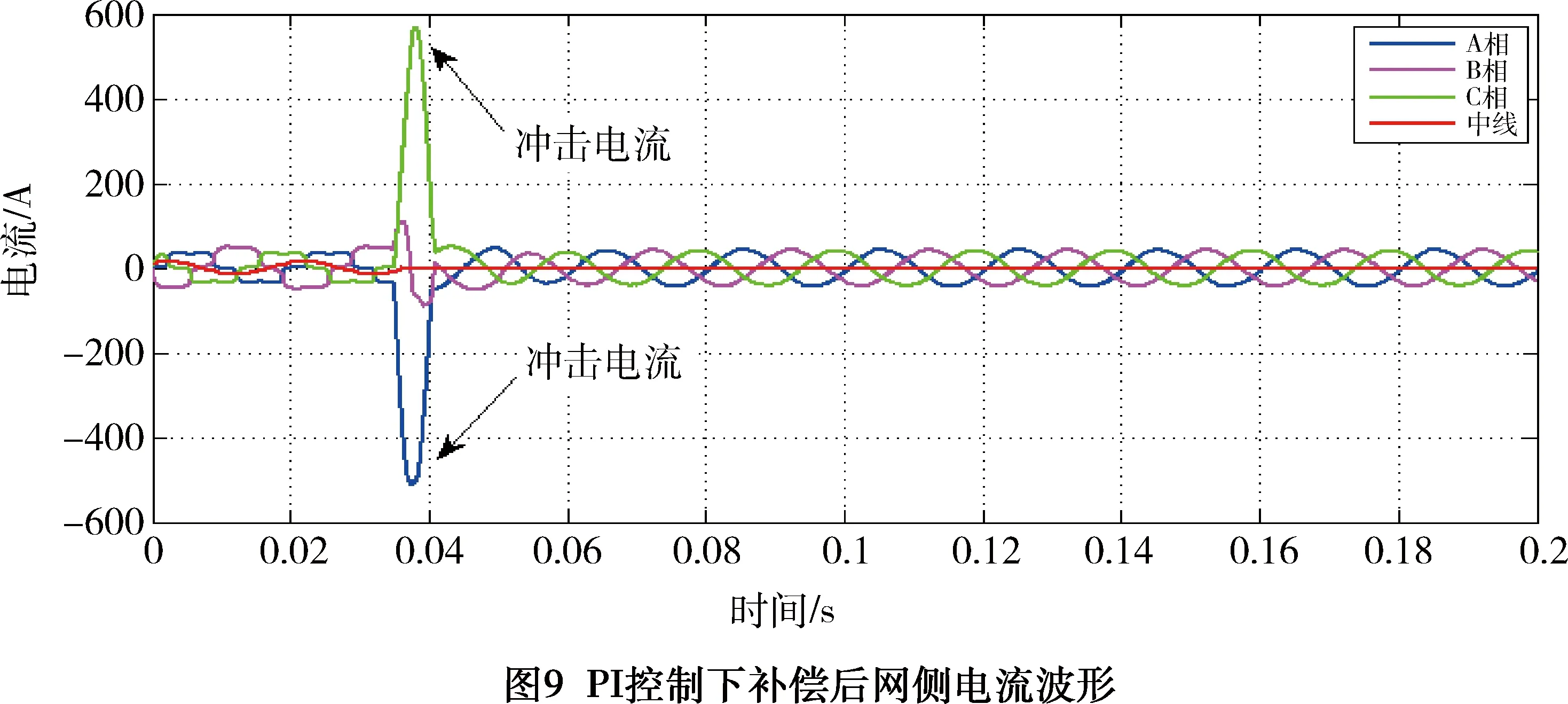
由图8和图9可得,在直流侧电压达到稳定的700 V之前,存在一个很大的冲击电压,最大值可以高达900 V。并且在此控制下的补偿后网侧电流也存在很大的冲击电流,可以由补偿前的负载电流45 A,突变到冲击电流600 A,然而这样大的冲击电流很容易造成器件的损坏。因此,针对系统启动时因直流侧单独PI控制所引起的电压、电流过冲问题,需要找到更好的解决方法。为此,提出将软启动控制方式引入三相四桥臂的APF谐波补偿装置的研究中,它能起到减小电压、电流冲击波,稳定直流侧电压的目的。
3.2 PI+软启动控制仿真分析
为了验证软启动在APF设计中的控制效果,在其他条件不变的前提下,将软启动控制引入系统,进行仿真分析。加入软启动之后的补偿后网侧电流波形如图10所示。
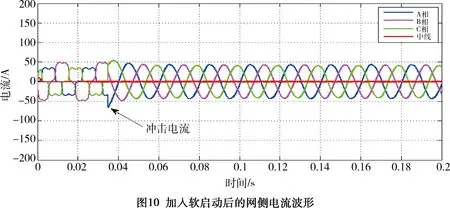
由图10得,将软启动引入四桥臂APF的电压控制中,直流侧不再存在冲击电压,且网侧最大冲击电流为70 A。
综合对比两种直流侧控制方式,可得:1)直流侧电压在单独PI控制时,在电压稳定在700 V以前,会存在一个很大的冲击电压且高达900 V。而加入软启动之后,直流侧电压可以平稳到达700 V,整个过程不存在冲击电压,且电压波动较小。2)补偿后的网侧电流,在加入软启动的控制方式与单独PI控制时相比,最大冲击电流由600 A降到70 A左右。
因此可以证明,直流侧电压控制时,将软启动控制和PI控制联合使用,可以有效减少APF系统接入电网时产生的冲击电压和冲击电流对电网的影响。从而降低了对设备的损耗以及对电网的冲击,为其更好应用到工程实践中起到了一定的意义。
4 总结
针对低压配电系统广泛使用三相四线制供电方式,所产生的负载不平衡、电压畸变导致的电网电流谐波含量高且存在中线电流等情况,设计了三相四桥臂的有源电力滤波器作为补偿电网谐波的装置。在补偿装置设计过程中,主要对电压环的控制进行研究,并通过仿真的方式对比分析了单独PI控制和PI+软启动的控制方式的控制效果,最终确定了电压环选用PI+软启动的控制方式。
猜你喜欢
工友(2023年7期)2023-07-21 06:02:38
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
通信电源技术(2018年3期)2018-06-26 08:05:48
火控雷达技术(2016年3期)2016-02-06 02:30:40
广西文学(2015年9期)2015-10-24 03:53:14
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2014年19期)2014-04-04 12:06:16
电测与仪表(2014年14期)2014-04-04 11:53:30
电子设计工程(2014年12期)2014-02-27 11:58:19