
基于惯性基准法的轨道短波不平顺检测系统
2019-07-25 00:37李浩然侯智雄刘伶萍魏世斌
铁道建筑 2019年6期
李浩然,侯智雄,刘伶萍,魏世斌
(1.中国铁道科学研究院 研究生部,北京 100081;2.中国铁道科学研究院集团有限公司 基础设施检测研究所,北京 100081)
轨道不平顺是指轨道的几何形状、尺寸及空间位置相对其理想状态和标准位置的偏差[1]。轨道不平顺是列车振动的主要原因,可能会增大轮轨动力响应,加速列车及轨道部件的损坏,增加工务部门的养护和维修成本[2];另一方面,由于轨道不平顺引起的列车高频振动可能降低乘坐舒适度,严重时甚至可能危及行车安全[3]。轨道不平顺按照波长通常可分为小于3 m 的短波不平顺、3~30 m的中波不平顺及大于30 m的长波不平顺[4]。短波不平顺是轨道不平顺的一种重要表现形式,分布广,发展快,危害大[5],因此,必须在早期就对短波不平顺加以检测和防治。
短波不平顺的检测方法主要分为弦测法、轴箱加速度积分法和惯性基准法。弦测法是以钢轨上首尾2个检测点的连线作为测量弦,中间检测点到该弦的正矢作为短波不平顺的测量值。基于弦测法的测量不受低速限制,但弦测法的传递函数在0~2不断变化,并不恒为1,因此测量结果不能准确地反映轨道短波不平顺的真实状况[6]。轴箱加速度积分法采用测量轴箱加速度值并经过2次积分的方法计算短波不平顺,这种方法设备结构简单,易于实现,但轴箱加速度动态变化范围较大,传感器很难满足分辨率及精度要求,因此检测精度不够高[7]。惯性基准法利用加速度计和位移计协同工作的方法检测短波不平顺,其传递函数理论上恒为1,可以检测任何波长的轨道不平顺,且加速度经过弹簧系统减振,动态变化范围大大减小,能够得到较高的检测精度[8]。
本文介绍的短波不平顺检测系统其传感器安装在车辆的转向架构架上,因此称为构架式短波不平顺检测系统。构架式短波不平顺检测系统基于惯性基准法,在车辆运行过程中对转向架上的加速度信号及位移信号进行处理和分析,获得代表短波不平顺状况的几何参数。
1 检测原理
惯性基准法原理如图1所示,其中M为质量块,A为加速度计,D为位移计,K为弹簧,C为阻尼,R为车轮半径。设Y为轨道短波不平顺值,Z为质量块M相对惯性基准线的位移,W为质量块M相对轴箱的位移。由图1可知短波不平顺值Y可表示为
Y=Z-W-R
(1)
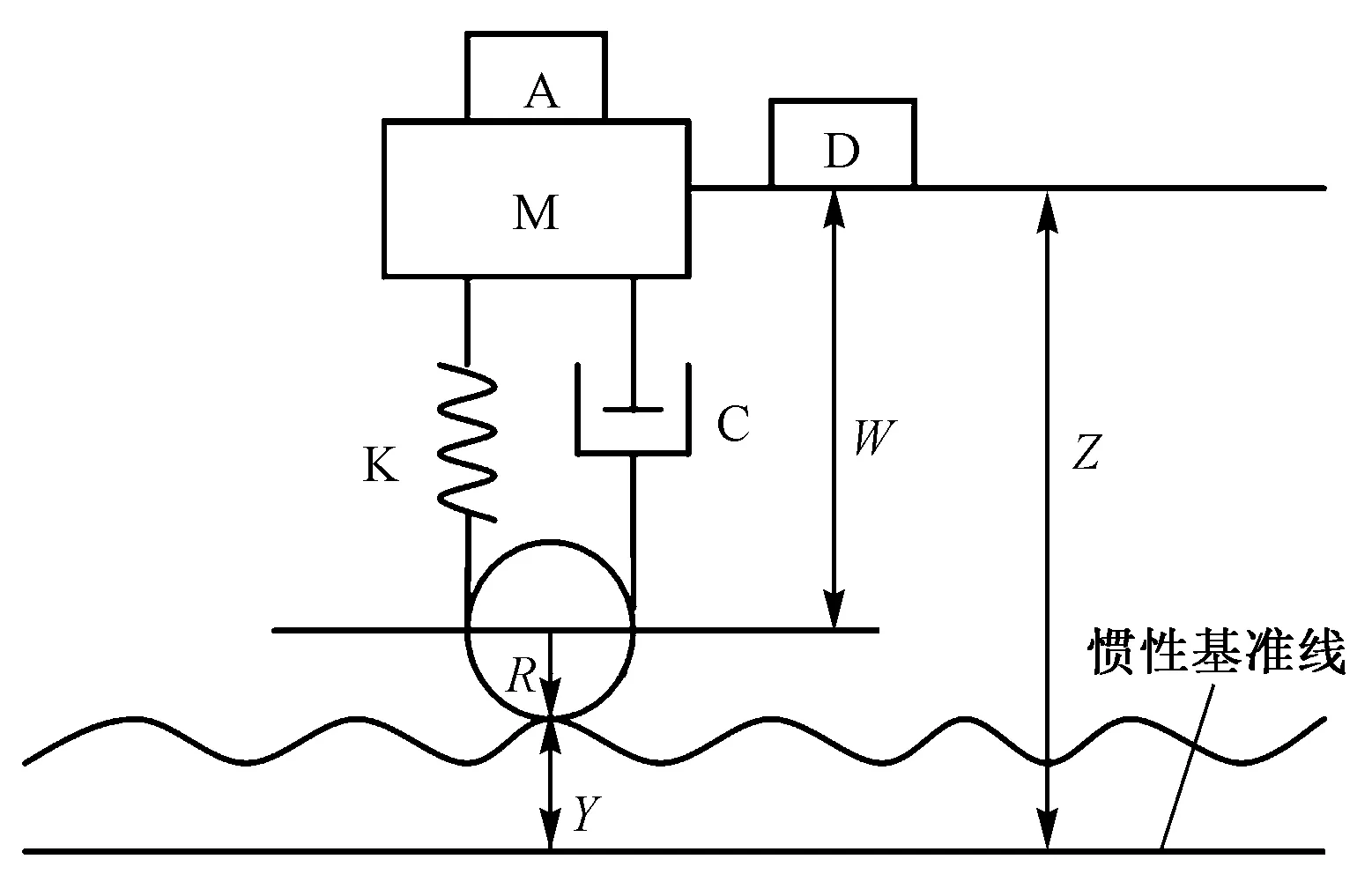
图1 惯性基准法原理示意
位移Z可通过加速度计的输出值a经过2次积分计算得到,位移W可通过位移计测得,则短波不平顺值Y可以进一步写为

(2)
2 检测系统设计
2.1 系统框架设计
构架式短波不平顺检测系统主要由传感器、前置预处理模块、实时采集计算机、数据处理计算机等构成。
前置预处理模块对加速度计及位移计采集的原始信号进行放大和模拟滤波处理;实时采集计算机对输入的模拟信号进行A/D模数变换、存储、数字补偿滤波;高通滤波器截取检测范围波长,经过综合运算合成短波不平顺几何参数;数据处理计算机将几何参数存入数据库,生成超限报表,输出波形图;网络打印机打印超限报表和波形图。构架式短波不平顺检测系统的数据处理流程如图2所示。

图2 数据处理流程
2.2 机械部件设计
构架式短波不平顺检测系统采用了新型的机械部件设计,如图3所示。在转向架侧壁焊接固定支座;通过加速度计和位移计安装支座分别在左右转向架上固定传感器;在轴箱上安装反光板支座,在支座上安装高程可微调的反光板。

图3 机械部件设计
2.3 滤波器设计
2.3.1 模拟滤波器
构架式短波不平顺检测系统采用二阶模拟低通滤波器对加速度信号进行抗混叠处理,滤除加速度信号中的高频干扰成分,其系统函数F(s)的表达式为
(3)
式中:s为时域内拉普拉斯算子;Ω2为时域角频率。
二阶模拟低通滤波器的Ω2是由电路参数决定的,因此可根据短波不平顺检测的特点,选定合适的电路参数确定Ω2,得到所需截止频率的二阶模拟低通滤波器,其幅频特性如图4所示。
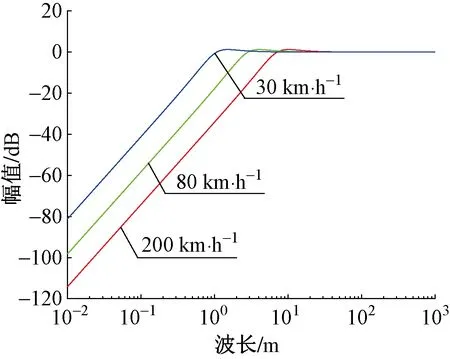
图4 二阶模拟低通滤波器幅频特性
2.3.2 数字补偿滤波器
由图4可知,该二阶模拟低通滤波器的幅频特性随着列车速度的变化而改变,即在空间域是移变的。为了得到与列车速度无关的传递特性,需要设计1个二阶去移变数字补偿滤波器,去除二阶模拟低通滤波器幅频特性的移变特性。
根据幅频特性、采样时间及舍入误差的影响,结合模拟域与数字域频率的映射关系,应用时间域与空间域频率转换关系,通过数学计算得到二阶数字补偿滤波器[9],其系统函数G(z)的表达式为
(4)

二阶模拟低通滤波器与二阶数字补偿滤波器级联得到二阶混合滤波器。采样间隔取0.01 m,二阶混合滤波器的幅频特性如图5所示,其截止波长为0.03 m。

图5 二阶混合滤波器幅频特性
2.3.3 高通滤波器
高通滤波器的功能是从不平顺检测值中滤除大于某一波长的长波成分,截取检测范围内有效波长,确保检测精度。
根据构架式短波不平顺检测系统的需求,采用了1个基窗和2个修正窗并联形式的高通滤波器。基窗采用1个三角窗,修正窗其中一个为三角窗,另一个由2个矩形窗并联[10]。该高通滤波器的系统函数U(z)的表达式为
式中:k,l,m,n为窗函数的窗长,决定了滤波器的截止波长和滤波特性;a′,b′,c′为比例系数,合理设置比例系数可使得滤波器的积分平方误差最小,优化滤波特性。
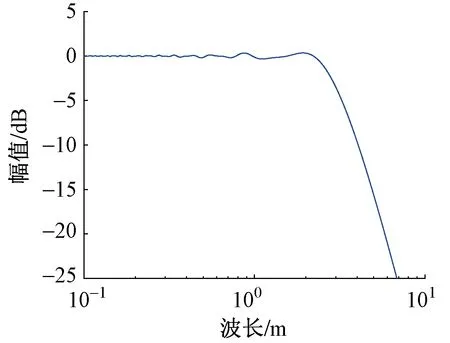
图6 高通滤波器幅频特性
根据构架式短波不平顺检测系统的要求,合理设置滤波器窗长和比例系数。由高通滤波器幅频特性(图6)可知,该高通滤波器的截止波长为3 m,通带内平坦,幅值增益波动较小,大于3 m的波长其幅值迅速衰减,过渡带陡峭,滤波特性优良。与二阶混合滤波器相结合,可知该构架式短波不平顺检测系统的波长检测范围为0.03~3 m。
3 系统应用
在实时操作系统下编程,以实现各滤波算法及各功能模块,并通过系统调试使构架式短波不平顺检测系统达到检测要求。
将该系统安装在一地铁轨检车上进行数据采集,通过实时操作系统处理可得到短波不平顺波形。图7是检测过程中随机截取的一段波形,其中LBM,LRMS,LACC,LPDT,Speed分别表示短波不平顺值、均方根值、加速度值、位移计值、检测速度。在现场使用平直尺进行静态复核,复核结果与轨检车动态测试结果吻合度较好,表明该系统能够正确反映轨道短波不平顺的实际状况。
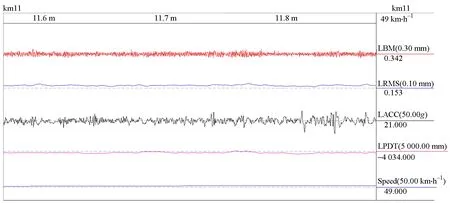
图7 短波不平顺波形
根据设定的阈值,对构架式短波不平顺检测系统得到的短波不平顺波形数据进行超限判断,得到超限数据并发送到数据库,对超限数据可进行编辑、报表统计、公里小结及区段总结。
4 结语
基于惯性基准法设计构架式短波不平顺检测系统新型机械部件,并选择合适的滤波器,可以满足波长范围0.03~3.00 m的短波不平顺检测。该系统结构简单,稳定可靠,实用性强。在一地铁轨检车上安装使用该系统,检测结果表明,该系统动态测试结果与现场静态复核结果吻合度较好,能够正确反映轨道短波不平顺的实际状况,可为轨道维修提供科学的依据。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
今日农业(2019年12期)2019-08-15
活力(2019年22期)2019-03-16
消费导刊(2018年8期)2018-05-25
科技创新导报(2017年28期)2017-11-28
电子技术与软件工程(2017年8期)2017-05-10
山东工业技术(2016年15期)2016-12-01
电脑知识与技术(2016年4期)2016-04-11
现代电子技术(2015年11期)2015-07-28
中国信息化·学术版(2013年2期)2013-06-08
