
长航时UUV导航校正与性能评估方法
2019-07-16 06:17叶开富
水下无人系统学报 2019年3期
陈 科,叶开富,杜 度,李 杨
(海军研究院,北京,100161)
0 引言
无人水下航行器(unmanned undersea vehicle,UUV)在海洋开发领域发挥着越来越重要的作用,如海洋资源探索,海底管道铺设,海底地形地貌描绘等[1-4]。导航是 UUV执行任务的前提,也是UUV能否顺利完成任务的重要保障。由于 UUV航行时会存在随时间不断累积的误差,这种误差对于短航时 UUV的影响较小,但对于长航时UUV而言,这种影响十分严峻:UUV导航性能的校正与评估结果直接决定了长航时 UUV执行任务的成败,而误差较大的导航结果会造成长航时UUV的撞毁与丢失等一系列问题。因此,研究长航时UUV导航校正与性能评估方法尤为重要。
长航时 UUV导航校正与性能评估方法主要分为 2个方面:一是对导航方法的校正,即在分析各种 UUV导航方法的基础上,利用组合导航的方式校正提高精度;二是对导航性能的评估,即设计一套统一的评价体系,以实现长航时UUV导航规范化和标准化评价。同时需通过分析长航时 UUV导航性能评估需求、评估方案及评估指标等,给出其导航性能评估方法体系。
基于此,文中对长航时 UUV导航校正与性能评估方法进行了系统阐述,给出其具体方法及性能指标,并提出相关分析建议,最后结合水下声学应答器(underwater transponder positioning,UTP)的特点,提出长航时 UUV 导航校正方法,通过仿真试验验证了所提方法的有效性。
1 UUV导航方法概述
UUV最早出现于20世纪50年代[5],近年来,学者们提出了多种 UUV导航方法,按照导航原理,主要分为惯性导航、声学导航、视觉导航和地球物理导航等。
1.1 惯性导航
惯性导航是 UUV最常用的导航方式,主要依据牛顿惯性定律提出[6-8],其优点是具有极高的自主性和隐蔽性。但是惯性导航存在随时间不断累积的误差,特别是对长航时 UUV的影响较为严重。UUV惯性导航通用微分方程主要包含姿态方程、速度方程和位置方程[9],即
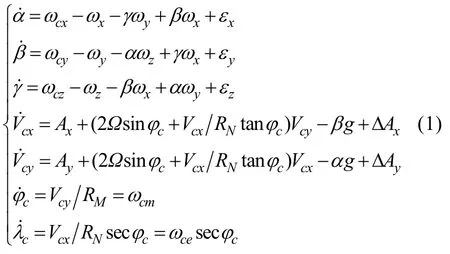
式中:α,,βγ为平台误差角;和分别为 3个坐标轴方向上计算得到的指令角速度;和zω分别为3个坐标轴方向上的指令角速度;εx,εy和εz分别为3个坐标轴上的陀螺漂移;vcx,vcy为速度;Δax,Δay为加速度计零偏;φc,λc为位置;Ω为地球自转角速度。
1.2 声学导航
水下的主要通信方式是水声通信,声学导航方法在长航时UUV导航中发挥着重要作用,因此在水声通信的基础上发展出水声导航系统[10]。声学导航的优点是导航结果较准确,且没有随时间累积的误差;缺点是由于声信标需提前布放,工作量较大,且对声信标位置的确定存在一定困难。
1.3 视觉导航
视觉导航是利用视觉设备实时确定 UUV在水下的位置[8]。这类导航算法较为复杂,需要UUV上配备全方位水下摄像机,且需要光信标等辅助设施。由于水下能见度较低,这种导航方式使用较少,常用于多UUV协同导航[11]。
1.4 地球物理导航
地球物理导航是利用地球物理的本身特征,如重力场、地磁场或海底地图等对 UUV进行导航[12]。其优点是隐蔽性很高,并且较为准确;缺点是需要提前测得所航行海域的地球物理信息,工作量较大且需要存储识别的任务量较多。
通过以上对 UUV导航方法的分析可知,适用于 UUV的导航方法具有不同的优缺点,若要实现长航时的水下导航,只应用传统的惯性导航方法,会存在累积误差,且单一导航方法不能满足要求,需要多种方法配合完成导航任务,提高长航时UUV导航精度。例如:若UUV可以在航行一段时间后浮出水面进行导航校正,那么就可利用与卫星导航组合的形式进行导航精度校正;另外,由于声学导航具有较高的定位精度,也可将其作为辅助校正方式,如长基线(long base line,LBL)、短基线(short base line,SBL)、超短基线(ultra-short base line,USBL)以及水下声信标等方式,对长航时UUV的导航结果进行校正;同时也可利用多传感器数据融合算法实现长航时 UUV导航校正。具体的导航方法以及数据融合滤波方法应根据实际应用情况进行选择。
2 试验需求
长航时 UUV导航校正与性能评估方法的实现需要试验场地、试验设备和评价机制等需求(见图 1),这些是完成长航时 UUV导航校正与性能评估的前提和重要保障。
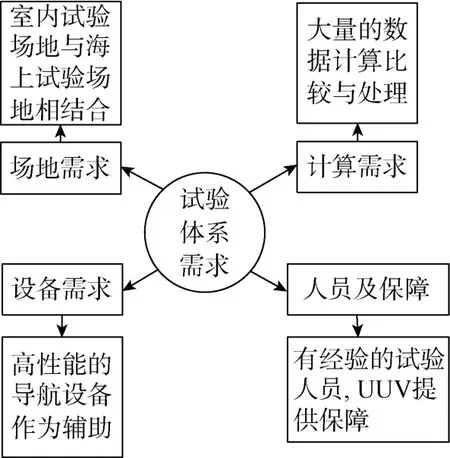
图1 长航时无人水下航行器导航试验需求Fig.1 Navigation test requirements of long-endurance unmanned undersea vehicle (UUV)
2.1 场地需求
对于一些小型短航时 UUV的导航设备,可以在室内水下进行性能评估。但室内水池无法模拟 UUV在海上应用时所受到的海浪、洋流等干扰,且长航时 UUV需要开阔海域才能完成长航程、长航时的水下导航性能评估。因此需要采用室内试验场地与海上试验场地相结合的模式,完成水下导航性能评估试验。
2.2 设备需求
导航性能的评估需要利用较为精确的外测或内测辅助设备。通常采用精度较高的全球定位系统(global positioning system,GPS)、光纤罗经运动传感器、多普勒计程仪(Doppler velocity log,DVL)等设备作为辅助设备。一方面给出当前设备的导航精度水平,另一方面,导航精度要求较高的UUV上也可携带上述设备,通过滤波算法实现组合导航,从而进行长航时UUV导航校正。
2.3 人员及保障需求
UUV导航试验中存在一定未知危险,如航行故障、未经过测试的导航设备不准确导致丢失等。由于 UUV在研制过程中投入了大量的资金和人力,一旦危险发生将产生巨大损失,因而需要有经验和专业知识的试验人员,能够有效预防问题,及时解决问题。同时,长航时UUV导航校正与性能评估需要多天的时间才能完成,需要对试验人员提供足够的生活保障,同时需要对UUV长航时航行提供足够的保障资源。
2.4 计算需求
有效的数据存储有利于对试验数据的分析。在进行数据分析时,利用已存储的可重复利用的数据可有效地减少试验次数。因此,试验用计算机应具有足够的数据储存能力及强大的数据处理能力,以保证对 UUV航行过程中导航性能的校正、分析与处理。通过对试验系统的整体设计及对数据存储方式的选择与设计,使其具备对数据实时分析处理以及航行后数据还原的能力,为长航时UUV导航提供可靠的数据处理保障机制。
3 实现方法及性能指标
3.1 实现方法及流程
长航时 UUV导航校正与性能评估的具体实现方法是利用较高精度的导航设备辅助测试UUV所携带设备的导航精度。由于卫星和无线电导航精度较高,在进行长航时 UUV导航性能评估时,可采用近水面航行的方式,利用卫星或无线电导航结果作为 UUV水下导航的评价基准。另外,也可采用其他导航精度较高的试验设备作为评估依据。通过室内水池试验以及海上试验 2种方式收集导航数据,将收集到的导航数据与基准导航数据对比,给出UUV导航性能评估结果。具体流程如图2所示。
1)试验准备。在进行长航时UUV导航校正与性能评估试验之前,应制定详细的试验方案,规划试验过程中 UUV的航行路径,确定并安装辅助导航设备,制定试验应急预案等。
2)UUV布放入水。利用吊放吊具等设备,将UUV缓慢布放入水,进行试验准备。
3)水下备航。启动 UUV备航模式,为自身携带的控制系统、导航系统等供电,并与控制中心交换信号,确认备航过程顺利进行。水下备航过程是长航时 UUV导航试验进行的重要保证,决定着航行试验的安全性和准确性,因而需要对水下备航阶段予以高度重视。
4)进行长航时UUV导航试验。根据预先设计的航行航路进行试验评估。按照水下导航执行任务的要求设计试验过程,根据预先设计的试验过程执行试验。
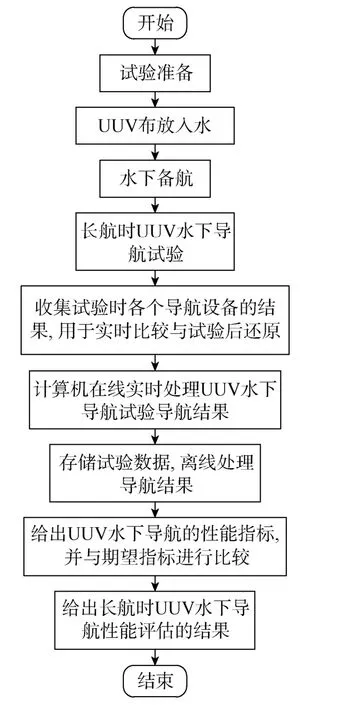
图2 长航时UUV导航性能评估流程图Fig.2 Flow chart of navigation performance evaluation of long-endurance UUV
5)收集各导航设备试验结果,用于实时比较和试验后还原。考虑到试验进行过程中要耗费大量的人力和物力,在设计长航时 UUV导航校正与性能评估方法时,采用数据采集存储的形式,数据一方面用于实时导航校正与评估,另一方面用于试验后数据离线时的精确处理及试验还原。
6)计算机在线实时处理 UUV导航试验结果。其目的在于,根据UUV在当前时刻的航行状态实时进行导航校正,并且实时评估导航结果,及时调整试验路线,避免潜在的试验危险。
7)存储试验数据,离线处理导航结果。与在线处理数据相比,离线处理数据可以提供更加精确的结果。另外,在试验后需要还原试验场景时,也可以进行离线数据处理,这样无需重新进行试验,可节约试验成本和时间。离线处理与在线处理相比有更高的处理效率与试验精度,可以对试验过程进行重现,以得到更好的结果。
8)给出 UUV导航性能指标,并与期望指标进行比较。通过比较给出长航时 UUV导航的系统化性能指标,便于横向比较各种类型的长航时UUV导航性能。
9)给出长航时UUV导航性能评估结果。结合上述各个步骤得到的结果综合评价长航时UUV导航性能,给出综合化的评价指标。
通过上述步骤完成长航时 UUV导航校正与性能评估的整个过程。
3.2 性能评估指标
长航时 UUV导航性能的评价标准主要包括姿态误差、速度误差和位置误差等。针对具体的试验需求,给出各项性能指标的要求,并将试验结果与期望指标相比较,利用比较结果进行水下导航校正与性能评估。当然,也可依据实际情况,与长航时 UUV的整体评价指标相结合,建立系统化的长航时 UUV导航性能评估体系(例如将UUV航行距离、使用寿命、具体执行任务等方面与其导航性能相结合)。
3.3 相关建议
建立长航时UUV导航校正与性能评估方法,有利于UUV导航性能的完善与装备研制的发展。对于长航时 UUV导航性能的评价,应站在全局角度,结合UUV的整体设计、任务需求等综合考虑,给出长航时UUV导航评估结果。长航时UUV导航校正与性能评估的目的在于,给出有说服力的水下导航评估结果,为设备性能提供可靠的评价指标。提高长航时 UUV导航精度的具体建议包含以下几点。
1)将长航时UUV导航校正与性能评估体系与长航时 UUV整体评价体系相结合,建立统一的评价标准。
2)建立通用的试验设施。在设计搭建试验场地时,应考虑不同试验对于场地及其他后勤设备的需求,建立统一化、通用化的试验场地以及后勤服务,可以有效提高试验场地及后勤设备的利用率,节约成本。
3)提高试验水平与实战水平的近似程度。利用试验设备模拟真实执行任务过程中的环境等情况,使得试验结果更加接近于真实实战水平,从而使长航时 UUV导航校正与性能评估方法的提出更加具有实际意义。
为了更系统地实现长航时 UUV导航校正与性能评估,应针对不同情况建立系统的导航评价标准。培养专业经验丰富的试验人员,成立长航时 UUV导航校正与性能评估指导小组,一方面需提高指导小组的专业技术能力,另一方面,需加强与各研制单位的交流协作,以培养更多、更全面的试验人才。
4 UUV UTP导航校正方法
传统的 UUV多采用惯性导航航位推算等形式确定其位置。根据UUV的初始导航信息,结合传感器测量结果推算 UUV的位置信息。这种方法在短时间内可以保证较高精度,但随着时间的增加,误差会不断发散。UTP是一种基于水声设备测距进而给出 UUV所在具体位置的水声辅助导航仪器。其原理是:在海底布放声信标,在测定时通过声音传输给出 UUV较为准确的位置信息。可以利用UTP辅助校正,以减小UUV导航的积累误差。下面以UTP为辅助导航设备[13],对UUV航位推算的结果加以校正。
4.1 航位推算系统误差模型
首先给出 UUV姿态误差、速度误差以及位置误差的表达式[13]如下
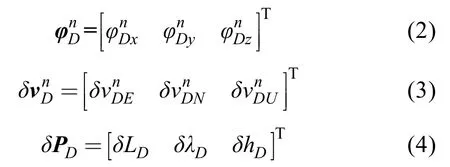
1)姿态误差方程
采用四元数方法对 UUV的姿态进行更新,经过推导,得到UUV的姿态误差方程为

2)速度误差方程
利用DVL的测量结果为UUV航位推算提供速度参考。根据 DVL的测量原理可知,其测量误差主要由刻度因数误差δKD、速度漂移误差ΔvD以及测量白噪声wΔ组成,即

式中,为多普勒测速仪在载体坐标系下的速度测量值。
3)位置误差方程
首先给出UUV的位置微分方程
结合位置微分方程可以得到 UUV的位置误差方程为
4)UTP辅助航位推算的UUV状态方程
结合以上推导的 UUV姿态、速度和位置的误差方程,选择状态变量,可以建立 UTP辅助UUV航位推算的状态方程

式中:x为状态变量;F为系统矩阵;G为控制矩阵;w为控制向量。
5)UTP辅助航位推算的UUV观测方程
UUV航位推算系统的位置解算方程为

UTP系统的位置解算方程为
将UUV航位推算系统位置解算值与UTP系统位置估计值的差值作为观测量,可以建立系统的观测方程

4.2 UTP辅助UUV校正仿真
通过设计下述仿真试验验证所提出的 UTP辅助 UUV航位推算导航校正结果。试验相关参数设置如下:UUV初始位置设置为东经120°、北纬 30°;姿态误差分别为 1′,1′和 10′。三轴速度误差均为0.6m/s,三轴位置误差均为10m。得到UTP辅助导航校正UUV的位置结果如图3所示。
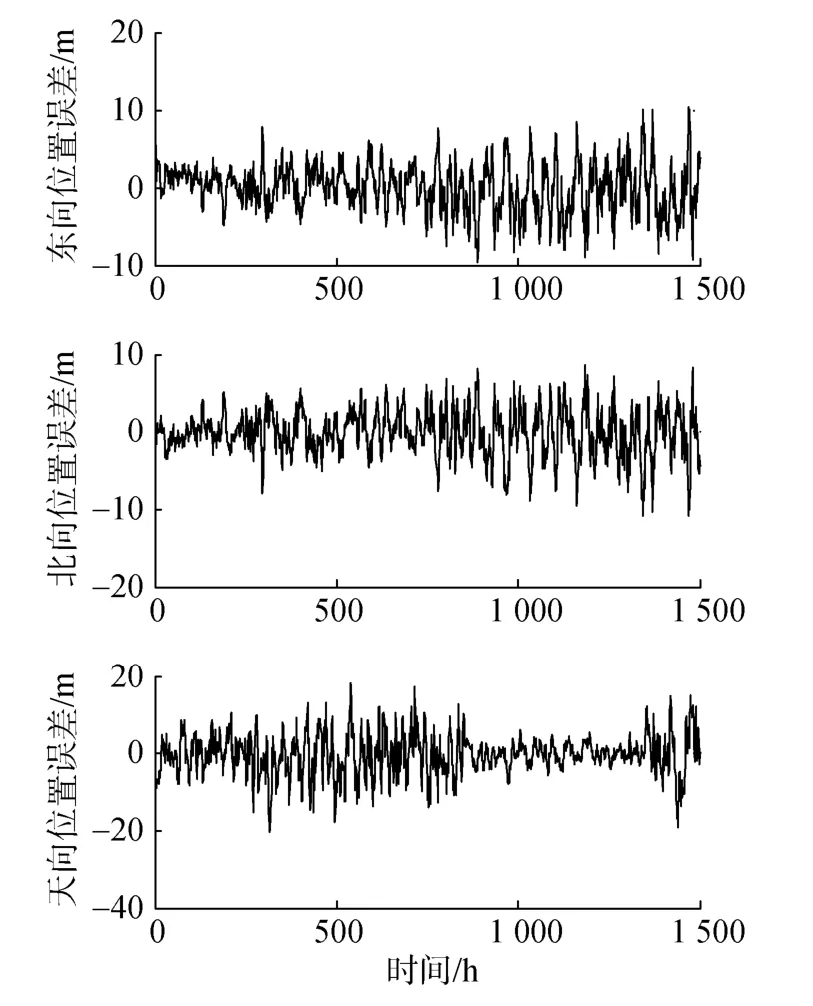
图3 水下声学应答器辅助校正结果Fig.3 Results of calibration assisted by underwater transponder positioning (UTP)
通过图 3可以看出,经过 UTP辅助校正的UUV位置导航误差均稳定在零值附近,且在20 m范围内来回波动。仿真结果证明UTP可以为UUV提供较为准确的位置校正信息,经过UTP的校正,抑制了UUV的导航位置误差发散。
5 结束语
文中通过对 UUV导航方法的分析比较,提出了长航时 UUV导航校正与性能评估的实现方法与流程,并结合UTP对长航时UUV导航累积误差进行了校正。仿真结果表明,通过UTP辅助导航的形式,可以有效减少长航时 UUV误差累积导致的发散,位置误差结果在零值附近波动,满足长航时UUV的导航需求。
猜你喜欢
工业设计(2022年9期)2022-10-13
疯狂英语·新读写(2021年6期)2021-08-05
科技视界(2020年26期)2020-09-24
儿童故事画报(2020年7期)2020-08-03
国学(2020年1期)2020-06-29
小学科学(2020年6期)2020-06-22
创新作文(1-2年级)(2017年7期)2017-12-26
佛山陶瓷(2017年8期)2017-09-06
中学数学杂志(初中版)(2017年4期)2017-08-28
党的生活·党员电教与远程教育(2009年2期)2009-05-13
