
重型车辆W-ECHPS中绕组式永磁耦合器的稳态性能研究*
2019-07-08 12:14:32江浩斌耿国庆
汽车工程 2019年6期
夏 磊,江浩斌,耿国庆
(江苏大学汽车与交通工程学院,镇江 212013)
前言
重型车辆广泛使用的液压助力转向系统(HPS),其助力特性固定不变,导致高速转向路感不足,且存在转向泵溢流损耗,造成系统能耗高[1-4]。为解决这些问题,电控液压助力转向系统(ECHPS)应运而生。其中,转向泵调速式ECHPS系统有无级变速式、磁流变液式、电磁转差式和永磁转差式4种,它们都采用置于发动机与转向泵之间的调速器控制转向泵流量,从而实现随速可变助力特性并消除转向泵溢流损耗。就系统能耗而言,由于转差功率以热量形式耗散,无级变速式和磁流变液式ECHPS系统的能耗没有明显降低[5-6];通过回收转差功率,电磁转差式ECHPS系统能够降低系统能耗,但电磁转差离合器工作时须持续通以励磁电流,效率低[7];由于转差功率消耗在外控制电路的电阻上,永磁转差式ECHPS系统的能耗也没有明显降低[8]。
基于上述讨论,本文中提出基于绕组式永磁耦合器(WTPMC)的ECHPS系统(W-ECHPS),介绍W-ECHPS系统和WTPMC的结构原理,确定不同行驶工况下WTPMC的运行参数,对WTPMC进行有限元仿真,以研究稳态性能,包括电磁性能、调速器性能和转差功率回收性能,试制WTPMC样机并进行台架试验,为验证有限元仿真的有效性,进行空载时线反电动势、IGBT的占空比和超级电容端电压的仿真与试验对比。
1 系统描述
1.1 W-ECHPS系统的结构原理
图1为W-ECHPS系统示意图。W-ECHPS系统以HPS系统为基础,加装了WTPMC、电子控制单元(ECU)、车速传感器和转向盘传感器。WTPMC的输入端与发动机相连,输出端与转向泵相连,输入转速与输出转速的差值为转差速度。
图2(a)为HPS系统的转向泵流量特性。发动机怠速为700 r/min,转向泵的限流转速为600 r/min。转向泵的理论流量与发动机转速呈正比关系,输出流量恒定,两者的差值为溢流流量。图2(b)为W-ECHPS系统的转向泵流量特性。WTPMC的输出转速范围设为300~600 r/min,其中300 r/min为转向泵的最低稳定转速。由于WTPMC的输出转速不超过转向泵的限流转速,转向泵的理论流量等于输出流量(统称为转向泵流量)。转向泵流量与WTPMC的输出转速呈正比关系。
W-ECHPS系统工作时,ECU根据车速和转向盘角速度信号控制WTPMC的输出转速,调节转向泵流量,从而实现随速可变助力特性,改善高速转向路感。此外,W-ECHPS系统消除了转向泵溢流损耗,并通过回收转差功率,从而降低系统能耗。
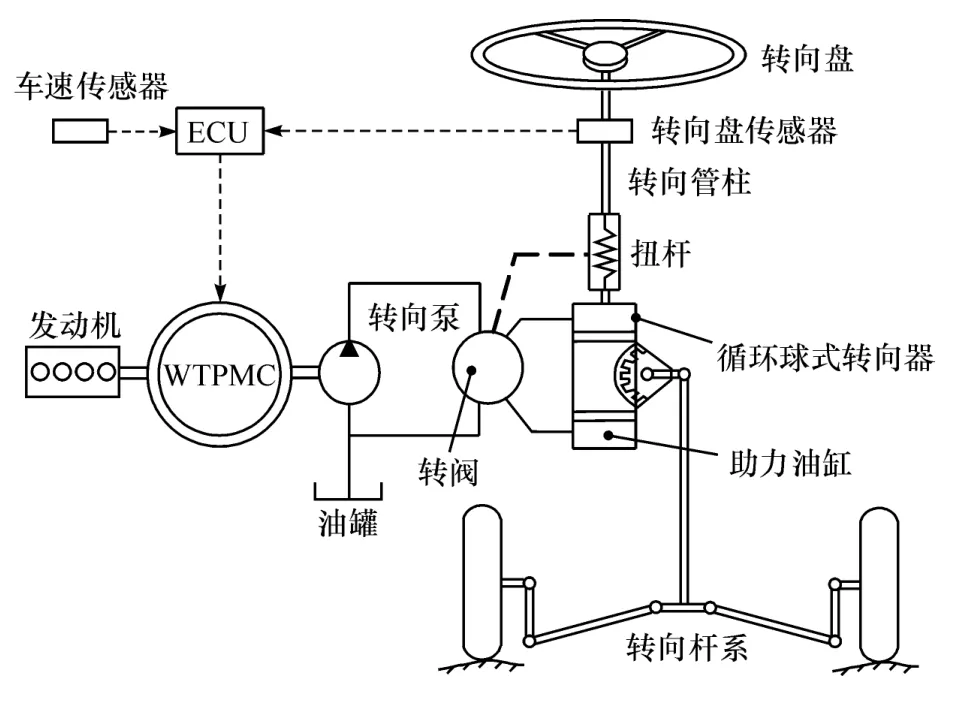
图1 W-ECHPS系统示意图

图2 转向泵流量特性
1.2 WTPMC的结构原理
WTPMC的工作原理为:当发动机驱动外转子转动时,在永磁磁场的作用下,内、外转子的相对运动在三相绕组中感应产生交流,它通过二极管整流桥变为直流。作为调速器,ECU调节IGBT的占空比以改变电路中的直流大小,进而控制WTPMC的输出转速。同时,为实现转差功率回收功能,当IGBT关断时,电路中的直流给超级电容充电[9-10]。
综合来看,WTPMC的转子总成可等效成以转差速度为转速的表贴式永磁同步发电机[11-14],其气隙磁场、反电动势和电流的理想波形为正弦波。
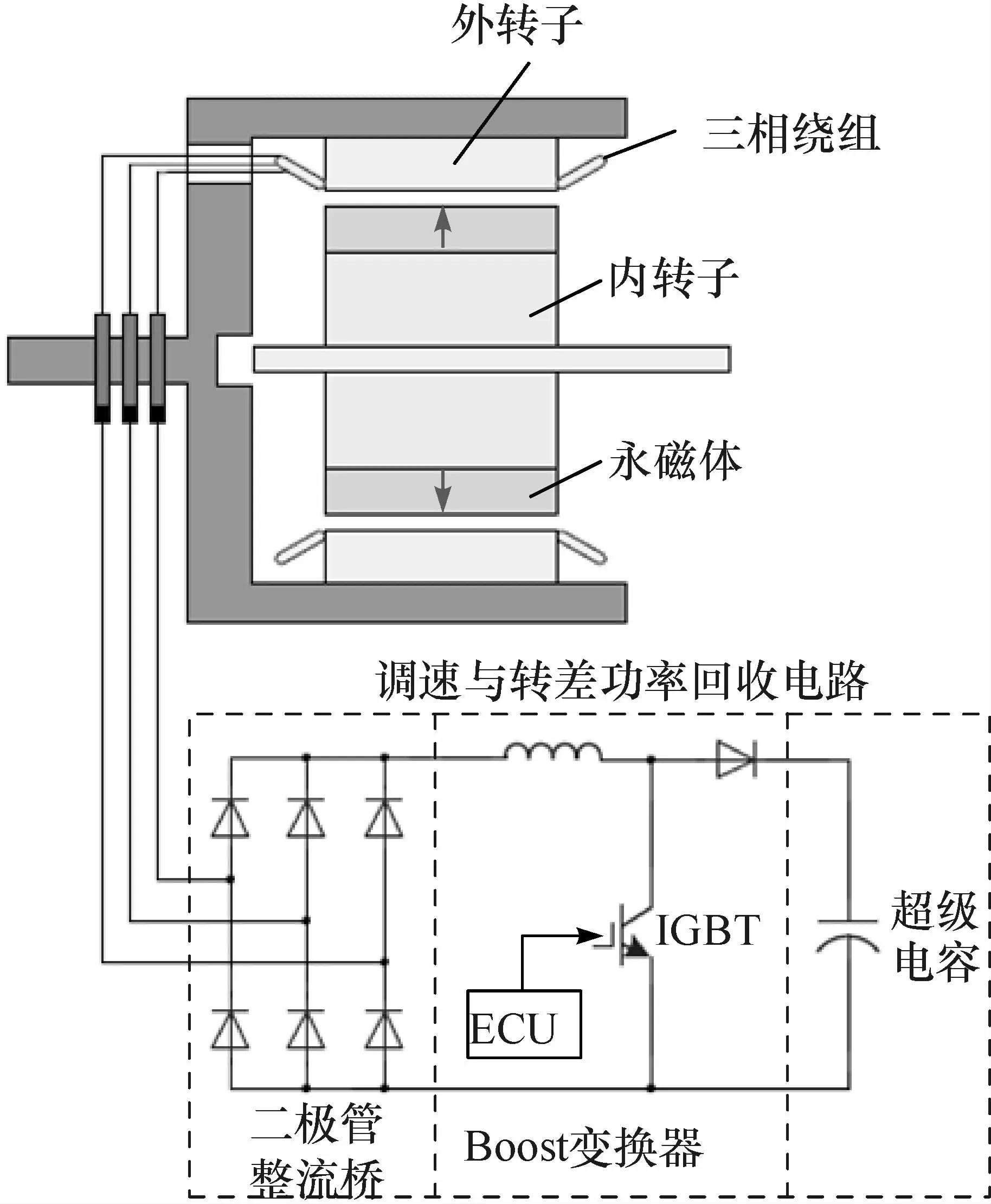
图3 WTPMC示意图
2 不同行驶工况下WTPMC运行参数
将汽车行驶工况分为直行工况和转向工况,确定不同行驶工况下WTPMC的输入转速、输出转速和负载转矩等运行参数,为WTPMC的设计和基于行驶工况的性能研究提供依据。
2.1 WTPMC的输入转速
WTPMC的输入转速等于发动机转速。当车速为0,20,40,60,80和100 km/h时,WTPMC的输入转速分别为700,920,1 120,1 240,1 300和1 630 r/min。
2.2 WTPMC的输出转速
WTPMC输出转速的目标值随着车速的增加而减小,而在同一车速下随着转向盘角速度的增加而增加。为实现如图4所示的随速可变助力特性曲线,表1给出不同车速和转向盘角速度下WTPMC的输出转速。
2.3 WTPMC的负载转矩
WTPMC的负载转矩与转向泵压力呈正比关系。在直行工况下,转向泵压力为1 MPa的背压,WTPMC的负载转矩为4.8 N⋅m。在转向工况下,根据W-ECHPS系统的随速可变助力特性曲线,得到负载转矩与车速的关系:当车速为0,20,40,60,80和100 km/h时,WTPMC的负载转矩分别为57.3,29.6,22.9,16.8,11.2和7 N·m。
通过加快开采技术的创新与研发,有效提高地质环境保护和治理工作的质量与效率。一方面,要积极推动产业结构的升级与优化,对于现阶段应用较广的开采设备与开采技术进行创新与改进。另一方面,矿山企业要与科研教育单位进行密切的联系与合作,积极将科研成果转化为实际生产力。此外,还要注重先进开采设备与技术的引进,为提高生产效率、提升地质环境保护质量奠定基础。
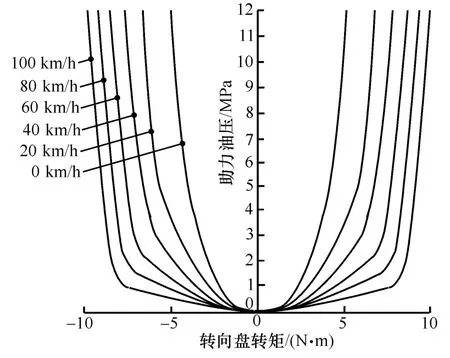
图4 W-ECHPS系统的随速可变助力特性曲线
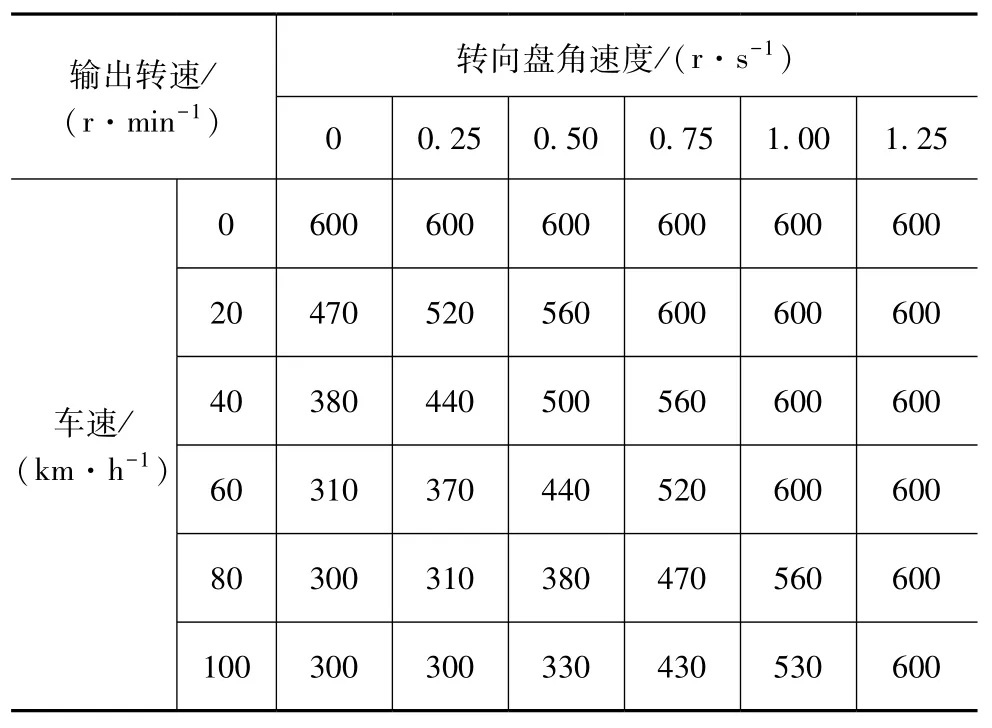
表1 不同车速和转向盘角速度下WTPMC的输出转速
综上所述,直行工况和转向工况下WTPMC的运行参数如表2和表3所示。

表2 直行工况下WTPMC的运行参数
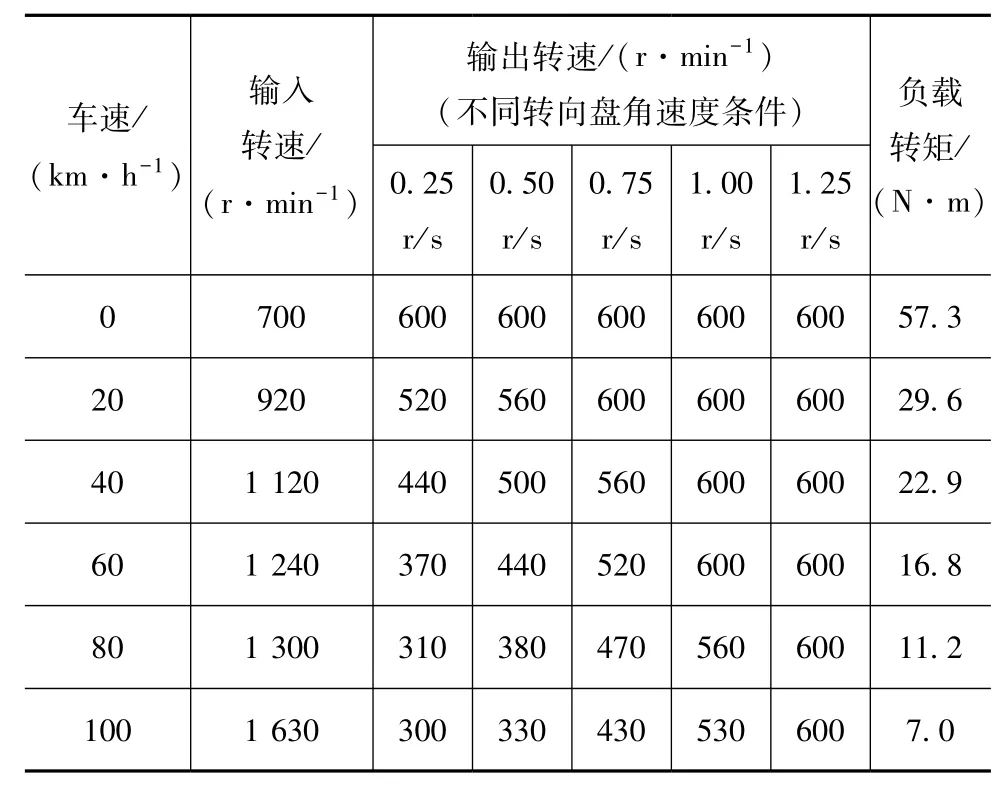
表3 转向工况下WTPMC的运行参数
3 WTPMC的稳态性能研究
3.1 有限元仿真
在原地转向工况下,WTPMC处于转差速度最小而负载转矩最大的运行极限点。针对运行极限点进行WTPMC的设计,其尺寸参数如表4所示。
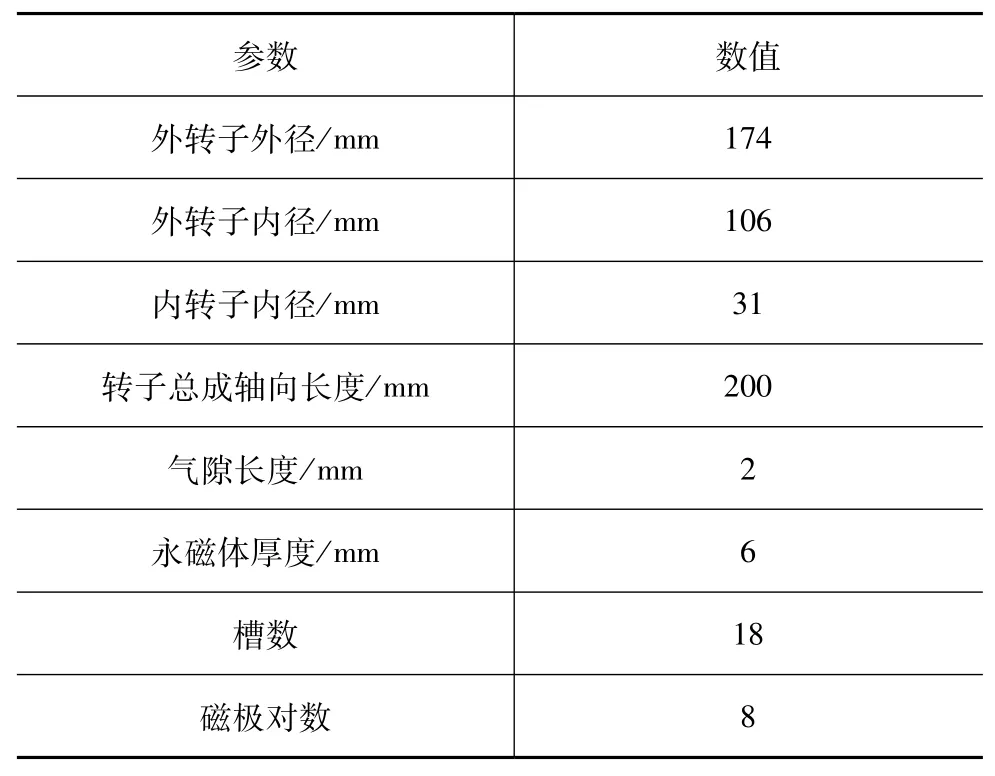
表4 WTPMC的尺寸参数
采用Ansoft Maxwell软件对WTPMC进行二维有限元仿真[15-16]。由于对称性,建立转子总成的1/2几何模型,如图5所示。在此基础上,采用自适应网格划分方法,建立转子总成的有限元模型。为模拟调速与转差功率回收电路,建立如图6所示的WTPMC等效电路模型,其中LPhaseA,LPhaseB和LPhaseC代表外转子的三相绕组。WTPMC的等效电路模型参数如表5所示。转子总成的有限元模型与WTPMC的等效电路模型通过三相绕组接口连接。
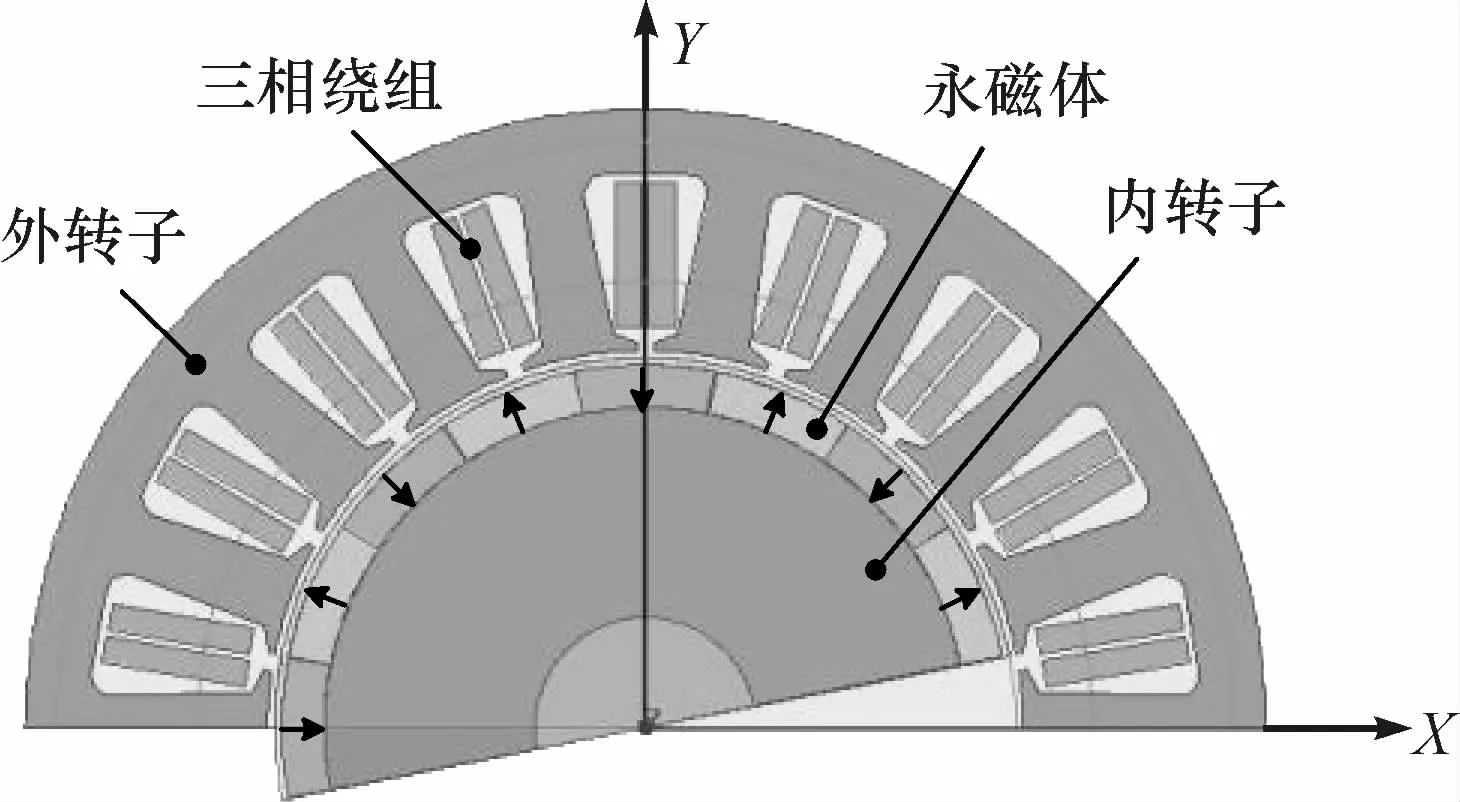
图5 转子总成的几何模型
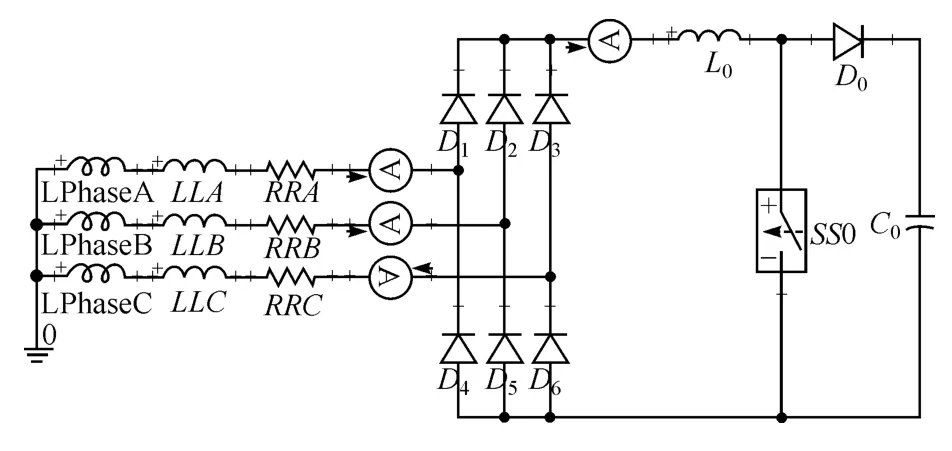
图6 WTPMC的等效电路模型
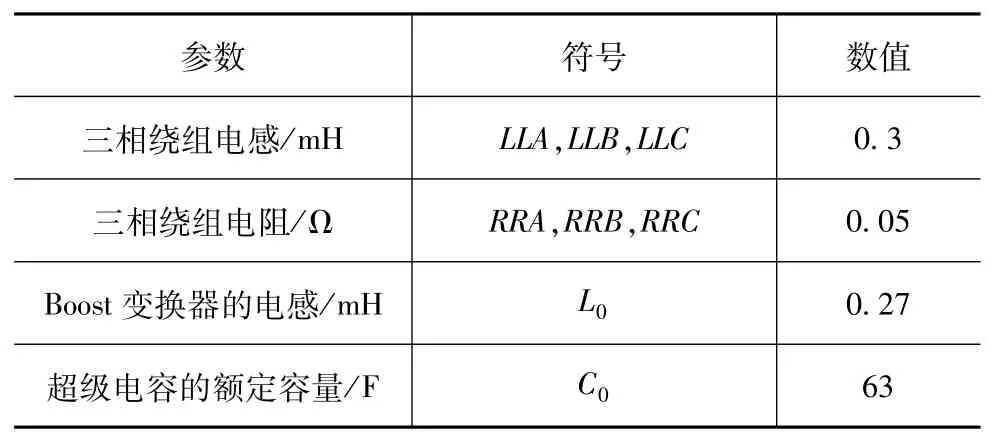
表5 WTPMC的等效电路模型参数
3.2 稳态性能分析
3.2.1 电磁性能
针对运行极限点分析WTPMC在电气空载与负载下的电磁性能。转差速度设为100 r/min。图7为空载时转子总成的磁力线分布图。可以看出,绝大部分的磁力线构成闭合磁路,只存在少量的漏磁,说明转子总成的磁路设计较合理。图8为空载时转子总成的气隙磁密曲线。可以看出,气隙磁密波形大致呈正弦分布,由于谐波的存在,在部分位置产生畸变。图9为空载时三相绕组的线反电动势曲线。可以看出,线反电动势波形的正弦度较高,表明WTPMC具有良好的电磁性能。图10为负载时三相绕组的电流曲线。可以看出,电流波形的正弦度较高。三相绕组电流产生的电磁转矩为60 N⋅m,超过57.3 N⋅m的负载转矩,能满足运行极限点的要求。
3.2.2 调速器性能
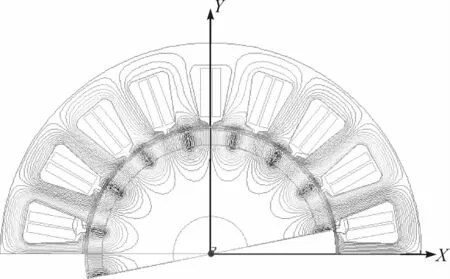
图7 空载时转子总成的磁力线分布图
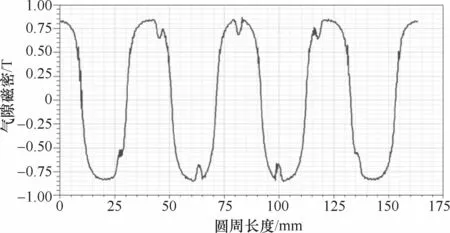
图8 空载时转子总成的气隙磁密曲线
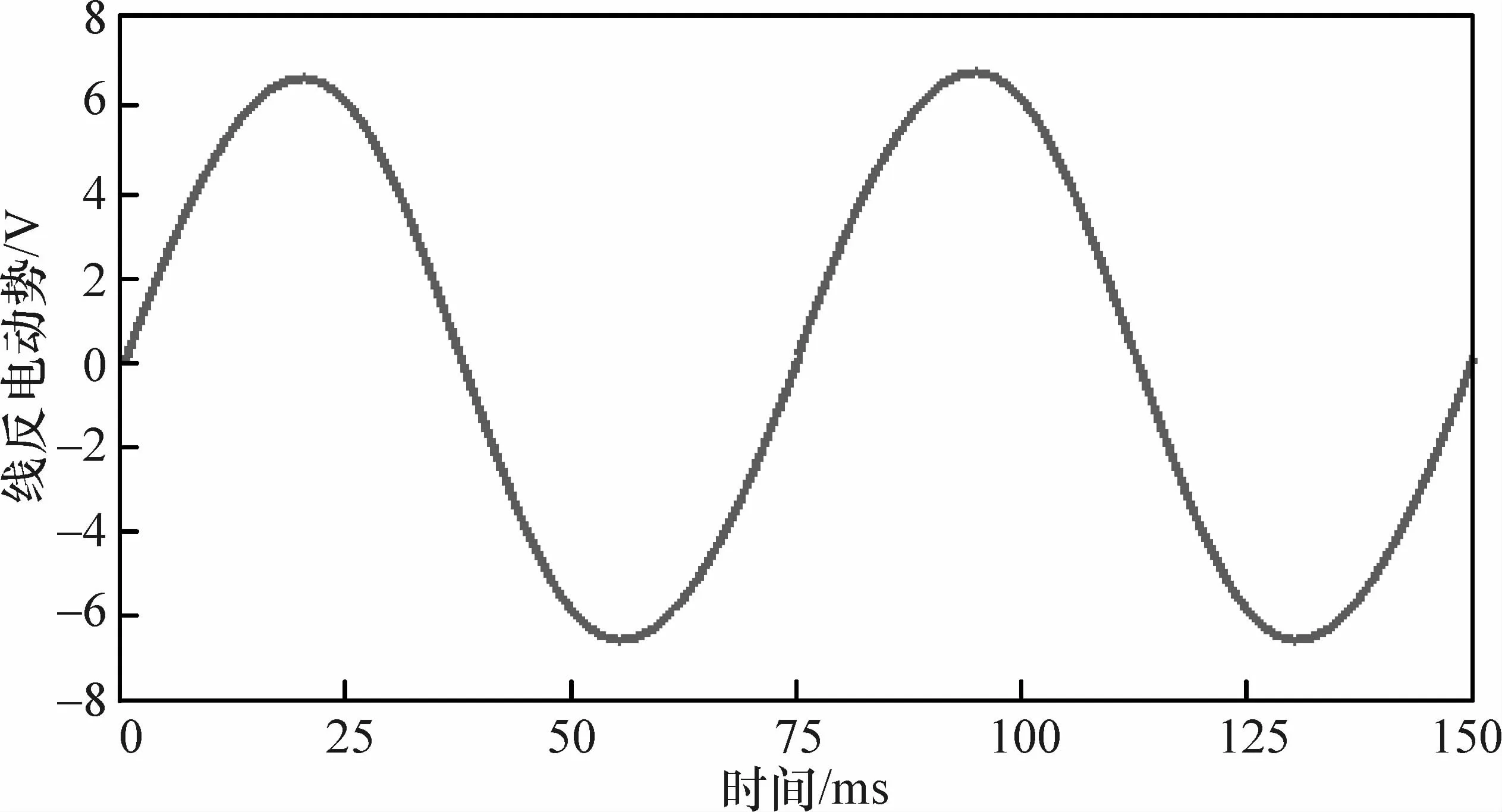
图9 空载时三相绕组的线反电动势曲线
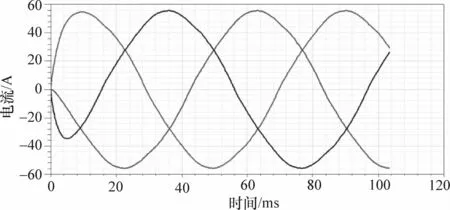
图10 负载时三相绕组的电流曲线
直行工况和转向工况下IGBT的占空比如表6和表7所示。超级电容的端电压设为85 V。转向工况的转向盘角速度设为0.5 r/s。仿真结果表明:通过调节IGBT的占空比,WTPMC能在不同行驶工况下运行。
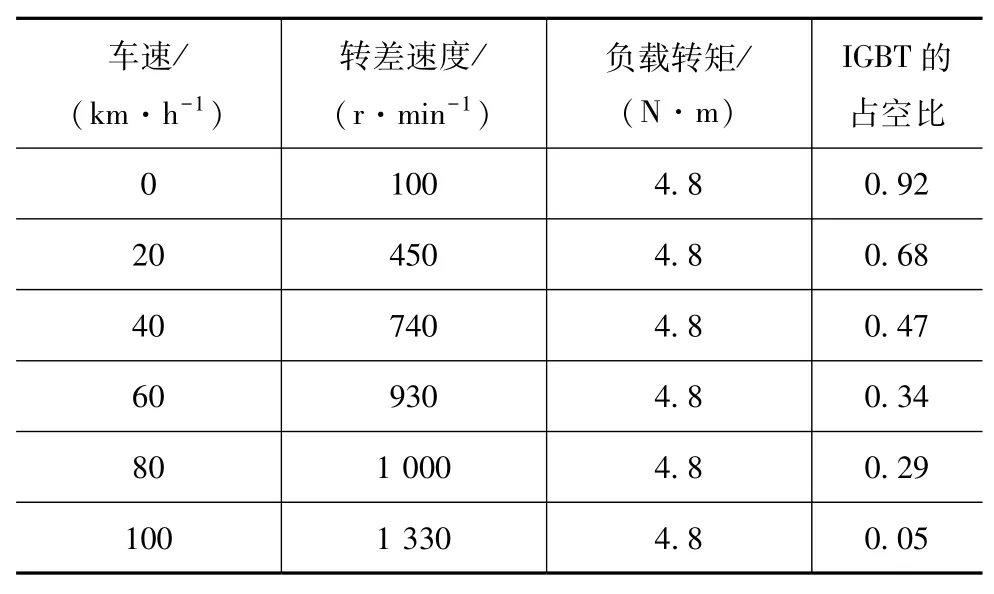
表6 直行工况下IGBT的占空比
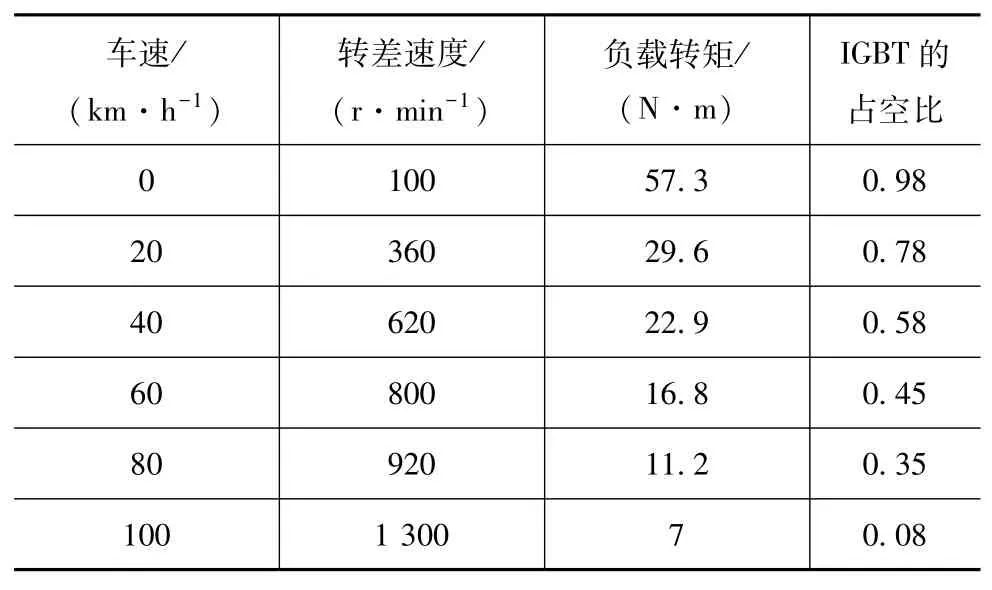
表7 转向工况下IGBT的占空比
3.2.3 转差功率回收性能
在转差功率回收过程中,WTPMC存在的损耗:1)三相绕组的铜损,它随着三相绕组电流的增加而增加;2)铁心的铁损,它随着转差速度的增加而增加;3)调速与转差功率回收电路的损耗。因此,超级电容的回收功率小于转差功率,其比值为转差功率回收率,是评价转差功率回收性能的指标。
转差功率Pslip为

式中:Tl为负载转矩;Ω为转差速度。
超级电容的回收功率Pr为

式中:Csc为超级电容的额定容量;Usc1为超级电容的初始端电压;Usc2为超级电容的最终端电压;Δt为时间间隔。
转差功率回收率Rr为

考虑车速为80 km/h时的直行工况,进行转差功率回收的仿真。WTPMC的转差速度为1 000 r/min,负载转矩为4.8 N⋅m,由式(1)计算得到转差功率为502 W。图11为超级电容端电压曲线。超级电容的初始端电压设为85 V。在充电10 s后,超级电容的最终端电压为85.64 V。超级电容的额定容量为63 F。由式(2)和式(3)计算得到超级电容的回收功率为344 W,转差功率回收率为68.5%。
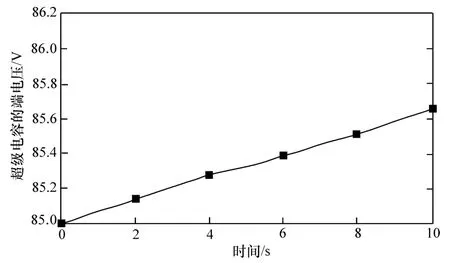
图11 超级电容端电压曲线
为检验WTPMC在不同行驶工况下的转差功率回收性能,进行直行工况和转向工况的仿真,得到的转差功率回收率如表8和表9所示。超级电容的初始端电压设为85 V。转向工况的转向盘角速度设为0.5 r/s。仿真结果表明:WTPMC具有良好的转差功率回收性能,在不同行驶工况下的转差功率回收率在67.4%~72.5%之间。
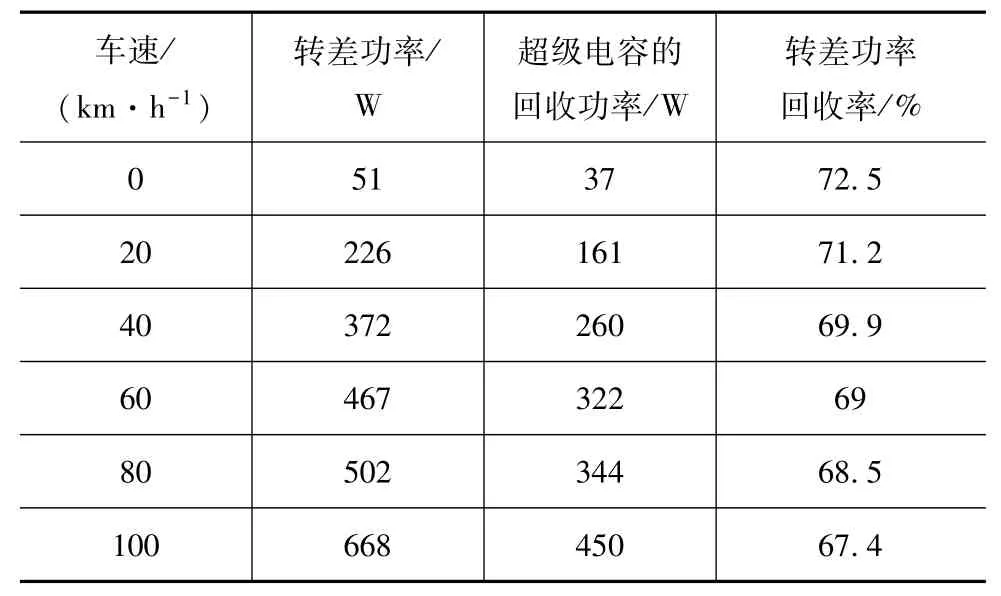
表8 直行工况下的转差功率回收率

表9 转向工况下的转差功率回收率
4 WTPMC的样机与台架试验
4.1 样机与试验台架
在仿真结果满足要求的基础上,试制了WTPMC样机,如图12所示。选用Maxwell Technologies公司的超级电容,额定容量为63 F,额定电压为125 V。图13和图14分别为试验台架的示意图和实物图。除WTPMC样机外,试验台架包括变频三相异步电机、磁粉测功机、两个转矩/转速传感器和控制柜。变频三相异步电机用于模拟发动机,磁粉测功机用于模拟转向泵。两个转矩/转速传感器用于测量WTPMC的输入转速、输出转速和负载转矩。控制柜用于监测和调节各类信号,如超级电容的端电压和IGBT的占空比等。
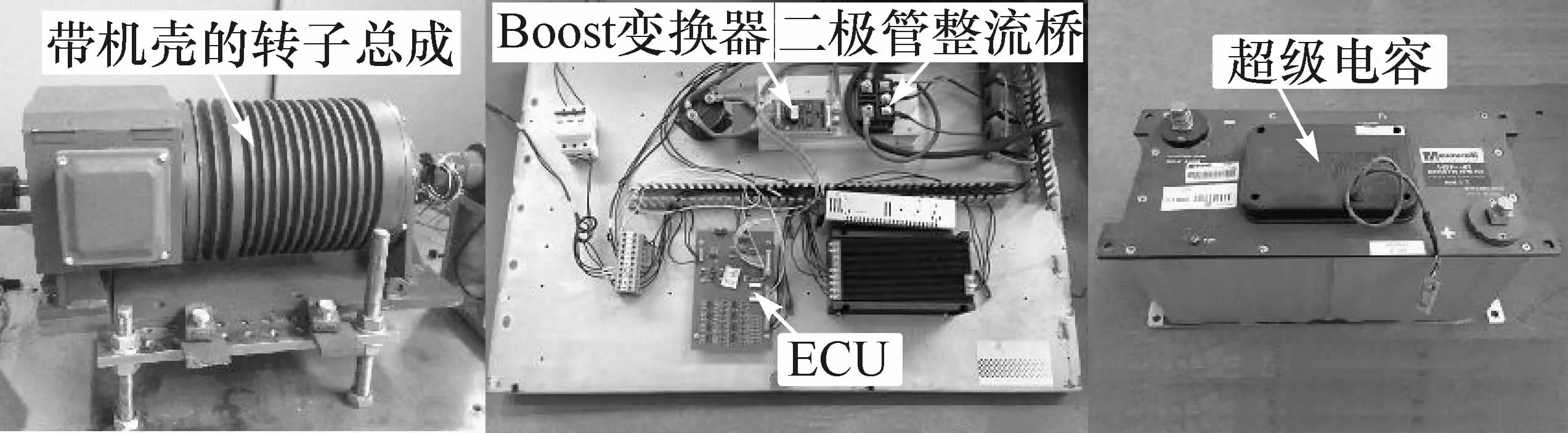
图12 WTPMC样机

图13 试验台架的示意图
4.2 仿真与试验对比
4.2.1 空载时线反电动势
图15为空载时线反电动势的仿真与试验对比。转差速度为100 r/min。可以看出,仿真结果与试验数据基本一致,验证了有限元仿真的有效性。仿真的线反电动势幅值略大于试验结果,误差在10%以内。

图14 试验台架的实物图
4.2.2 IGBT的占空比
图16为直行工况下IGBT占空比的仿真与试验对比。可以看出,仿真结果与试验数据基本一致,验证了有限元仿真的有效性。

图16 直行工况下IGBT占空比的仿真与试验对比
4.2.3 超级电容端电压
考虑车速为80 km/h时的直行工况,进行转差功率回收的试验。图17为超级电容端电压的仿真与试验对比。表10给出转差功率回收参数的对比。可以看出,仿真结果与试验数据基本一致,验证了有限元仿真的有效性。仿真的超级电容最终端电压为85.64 V,略大于试验结果,这是因为仿真考虑的损耗比样机实际存在的损耗小。
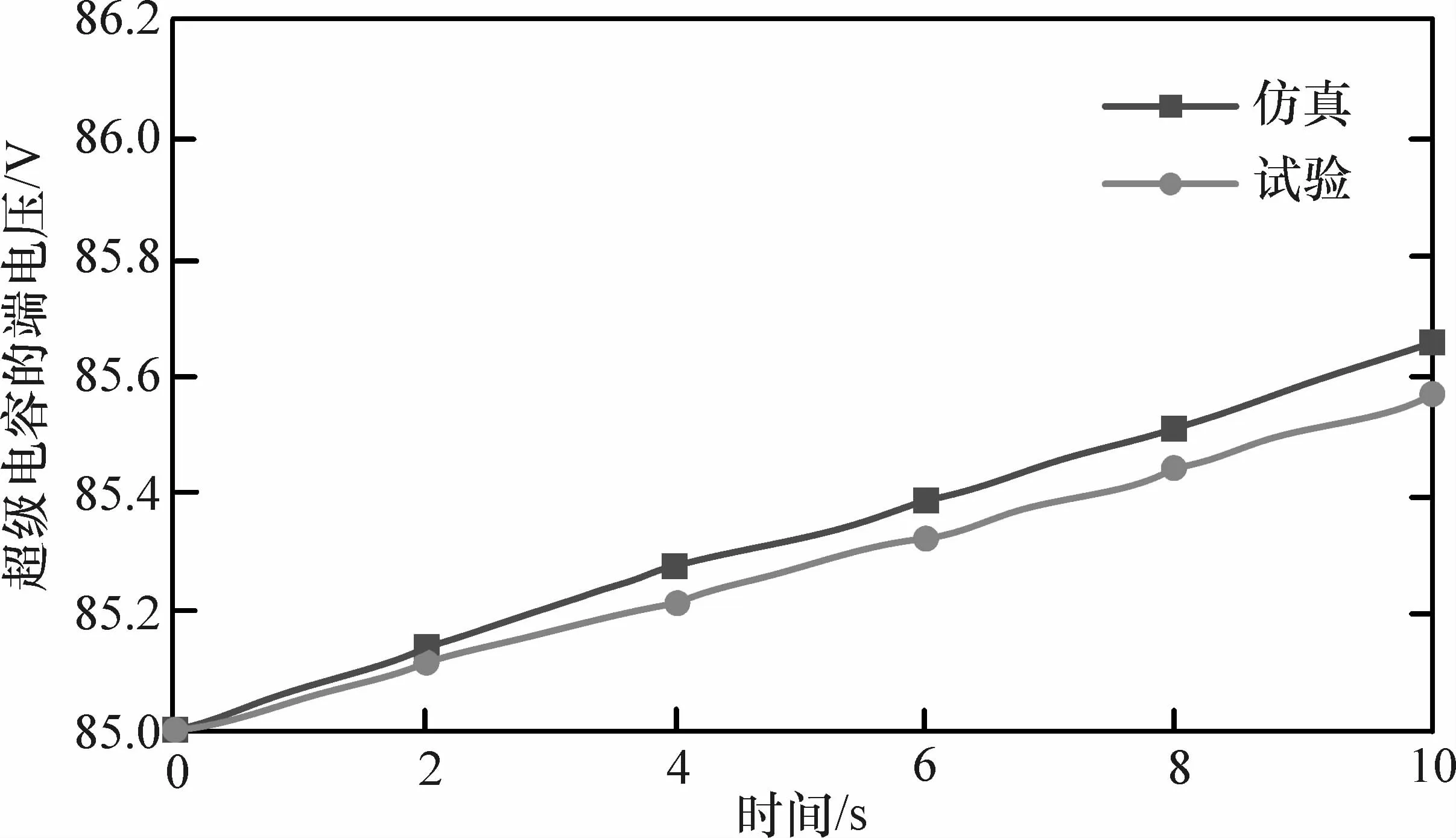
图17 超级电容端电压的仿真与试验对比
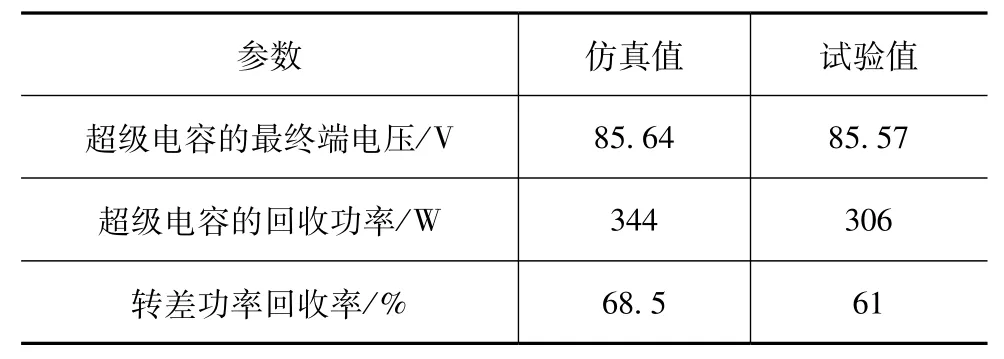
表10 转差功率回收参数的对比
5 结论
提出W-ECHPS系统,确定不同行驶工况下WTPMC的运行参数,对WTPMC进行有限元仿真,以研究稳态性能,试制WTPMC样机并进行台架试验,为验证有限元仿真的有效性,进行空载时线反电动势、IGBT的占空比和超级电容端电压的仿真与试验对比。仿真结果表明:WTPMC具有良好的电磁性能,能满足运行极限点的要求,通过调节IGBT的占空比,能在不同行驶工况下运行,同时具有良好的转差功率回收性能,在不同行驶工况下的转差功率回收率在67.4%~72.5%之间。此外,仿真结果与试验数据基本一致,验证了有限元仿真的有效性。
目前设计开发的WTPMC样机尺寸较大,将其装车进行实车试验有一定难度,下一步考虑对WTPMC样机进行优化,在满足总体性能的基础上实现小型化和轻量化。此外,下一步将研究如何利用车载电气系统进行转差功率回收,以提高W-ECHPS系统的装车实用性。
猜你喜欢
四川冶金(2018年1期)2018-09-25 02:39:26
水电站机电技术(2017年9期)2017-09-26 03:34:52
微特电机(2016年3期)2016-11-29 09:43:45
通信电源技术(2016年1期)2016-04-16 04:57:26
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
科技创新导报(2015年32期)2015-04-12 09:22:46
电机与控制应用(2015年3期)2015-03-01 03:49:59
江苏通信(2014年4期)2014-04-14 06:18:42
河南科技(2014年12期)2014-02-27 14:10:32
