基于杠杆法的4-8速行星变速机构教学设计*
2019-07-05 07:23张靖刘刚
武汉交通职业学院学报 2019年2期
张 靖 刘 刚
(武汉交通职业学院,湖北 武汉 430065)
一、引言
随着汽车技术的不断进步,自动变速器成为乘用车的主流配置。其中,以行星齿轮传动的液力机械式自动变速器,从主流为4速配置步入6速为紧凑车型主流配置、8 速为中高档汽车主流配置、9-10速为高级配置的时代[1]。然而,当前大多数《底盘电控系统检修》的职业教育教材对行星齿轮传动机构的教学方式通常采用公式法,教学内容通常还停留在对3 速、4 速机构的介绍上,即使有对6 速或以上挡位自动变速器的介绍,往往也只给出换挡执行元件工作规律表,鲜有案例给出详尽的动力传递路径分析。这种教学设计滞后于职业需求,甚至使学生对所学知识的实用性和可迁移性产生质疑。
二、行星齿轮机构杠杆分析法简介
行星齿轮机构的杠杆分析法最早在1981年被H.L.Benrord 和M.B.Leising 提出[2]。1999年,李庆、黄宗益使用杠杆法对并联行星齿轮机构做了系统分析,认为双排并联结构最高能实现4 个前进挡[3]。2012年尤明福等人对杠杆法进行了扩展[4],扩展后的杠杆法适用于所有4 排以内串—并联混合行星齿轮结构。2017年,侯国强等对拓展的杠杆法的原则进行了归纳[5]。由于杠杆法可以直观地看出各挡位传动比的变化以及参与传动的行星排,因此广泛用于行星齿轮传动方案的设计和分析[6-9]。杠杆法的图形化方式具有简单直观的特点,很适合用于教学来分析变速器的变速原理和传动比特点。然而目前,仅有少量职教教材[10]运用了杠杆法(图形法)开展对4 速机构的介绍,并且没有解释杠杆法的基本原理。
三、基于杠杆法的4-8 速行星变速机构教学设计
本文运用杠杆法,设计了将行星变速机构教学内容从4速扩展至8速的教学方案,能实现在少课时内将自动变速器教学内容与市场产品接轨的同时,增强学生对行星齿轮机构以及换挡执行机构作用的理解,提高学生学习兴趣,并能培养学生的理论应用和创新能力。方案针对齿轮变速机构换挡原理这一理论内容按照4 个学时设计。第一课介绍杠杆法的基本原理,第二课讲解四支点杠杆分析01M/01N 4 速变速机构,第三课运用扩展杠杆法分析09G 的6 速变速机构,第四课组织学生讨论6-8 速机构的扩展方案并分析对应产品AA80E。
(一)讲解基本原理
目前,大多数《汽车底盘电控系统检修》职业教育教材中对单排行星齿轮机构运动规律不展开推导,直接给出运动规律方程。

式中:n 为转速,S 代表太阳轮,R 代表齿圈,P代表行星架,α为齿圈齿数ZR与太阳轮齿数ZS之比,即α=ZR/ZS。并在此基础上推导出8 种可能的传动方案及方案的传动比,如表1所示。
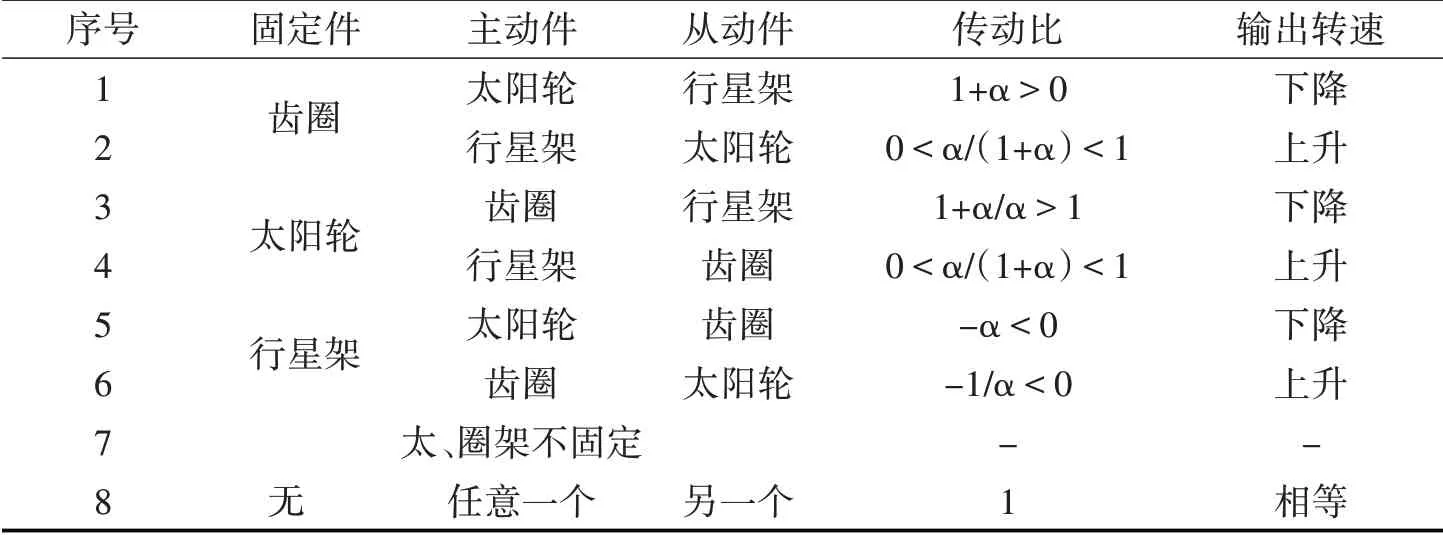
表1 单排行星齿轮机构的运动规律
这种方式对抽象思维能力较弱的中高职学生来说很难理解,同时各个方案的传动比需要依次推导,难以记忆,造成印像模糊,容易产生学习抵触情绪。
而采用杠杆法讲解时,可先运用“反转法”讲解单排单级行星齿轮机构各运动元件间转速规律的基本原理,即将整个系统附加一个与行星架相反的同等转速,将整个轮系以行星架作为坐标系,太阳轮与齿圈在新坐标系上的传动比为彼此齿数的反比,齿轮外啮合次数决定着传动方向,每外啮合一次,传动方向反向一次,因此可以得到:

X为传动外啮合次数,单级时为1,双级时为2。
对单级和双级行星齿轮,可以分别得到运动规律,
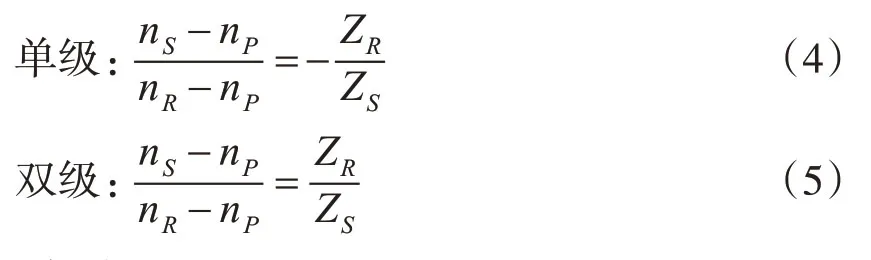
可以演算(4)与(1)等价,(5)与(2)等价。
对单级行星齿轮,可将齿轮排假象为一杠杆,杠杆的中间支点为P,端点为S 和R,S 到P 的距离与R到P的距离之比符合ZR/ZS,杠杆上三点的速度矢量端点永远在一条直线上(如图1-1)。将这个规律以相似三角形原理表达出来,即为单级行星齿轮速度规律(4)。
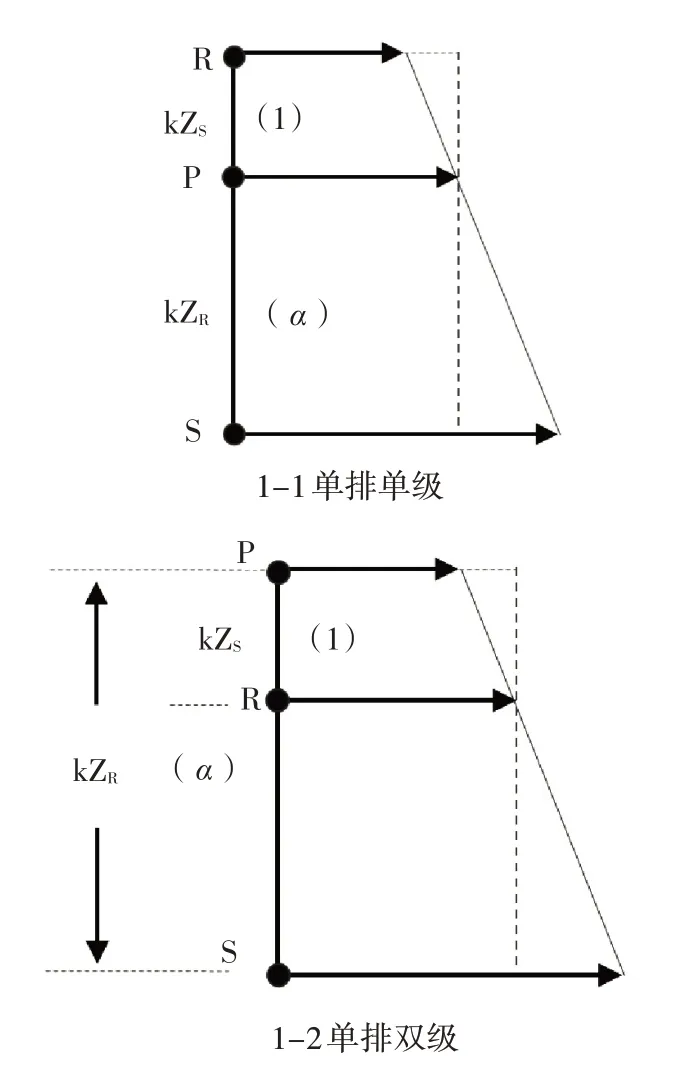
图1 单排行星齿轮机构杠杆图
对双级行星齿轮,也可将齿轮排假想为一杠杆,但是中间支点为R,端点为S 和P,S 到P 的距离与R 到P 的距离之比依旧要符合ZR/ZS(如图1-2)。同样用相似三角形原理可得到双级行星齿轮速度规律(5)。
在讲解了杠杆法的正确性后,将表2 设计成课堂作业,与学生一起讨论出8 种情况,强化学生的印象。将双级杠杆法表述的8 种情况留作为课下作业巩固知识。
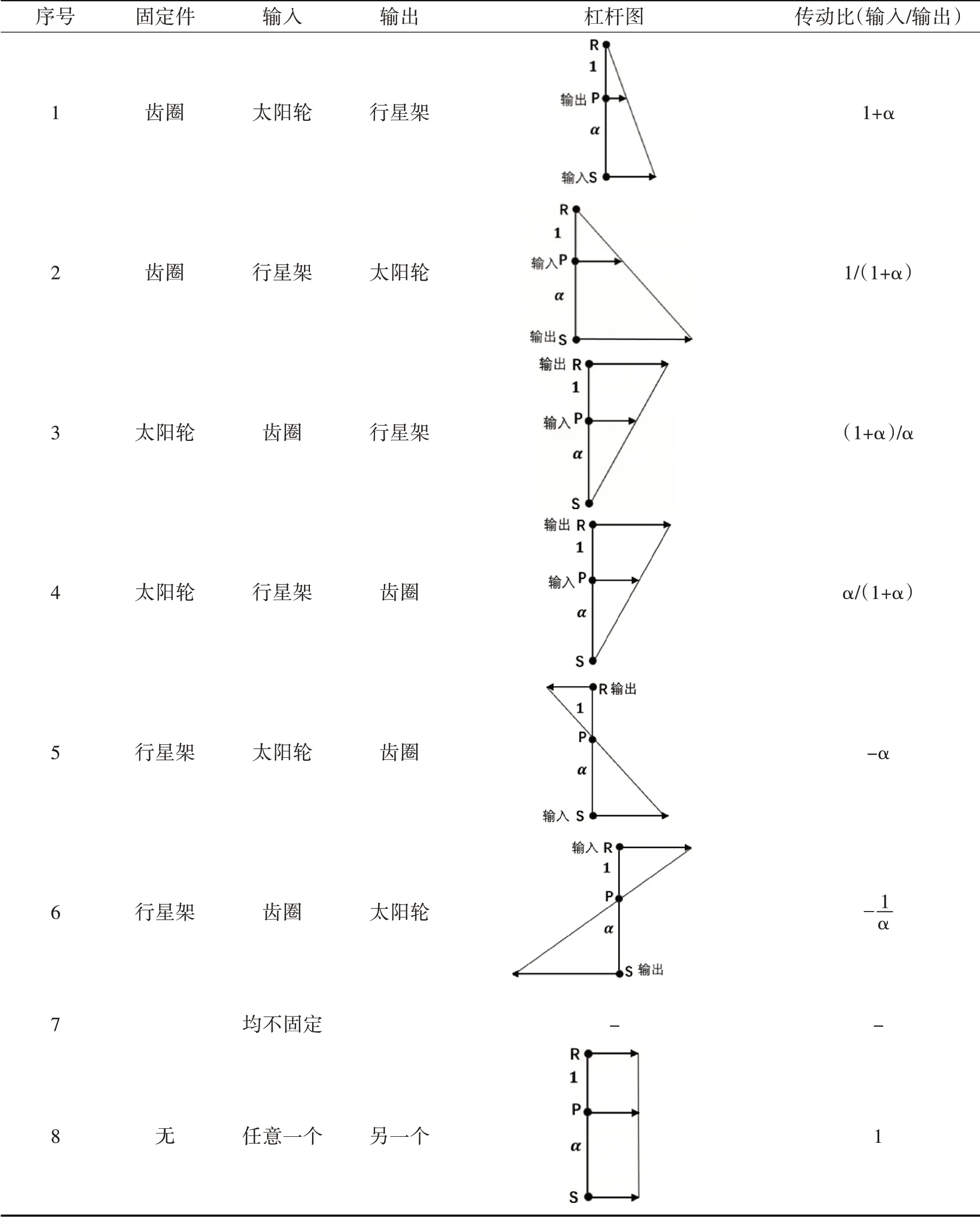
表2 杠杆法表述单排行星齿轮机构的运动规律
通过对比可见,杠杆法讲解单排行星齿轮速度规律时,原理清晰易懂,化抽象规律方程为形象的简单图形,方便学生记忆。对8 种传动结果不强调传动比的计算结果,只强调传动方向和增减速效果,容易形成感性认识,传动比易于自行推导,符合职业院校学生学习能力特点,为后继变速器挡位传动比变化推导打下坚实基础。
(二)讲解基本应用
01M 和01N 是德国大众开发的4 速自动变速器,两种变速器的行星齿轮传动方案完全一样,被广泛应用在1995 至2005年生产的的捷达、宝来、高尔夫、斯柯达、奥迪A4、帕萨特B5等车型上[8]。
01M/01N 采用拉维那式行星双排行星齿轮机构,前排为单级行星齿轮,后排为双级行星齿轮,其传动简图如图2 所示,换挡执行元件工作表如表3所示。在使用公式法讲解时,在第2挡传递路径分析时无法说明两排行星齿轮同时参与传动,必须联立五个方程求解传动比,通过最终传动比的计算结果i2=(α1+α2)/(1+α1)才能分析出两排共同传动。而且各个挡位传动比计算结果不能直观地显示出传动比的分布变化趋势。
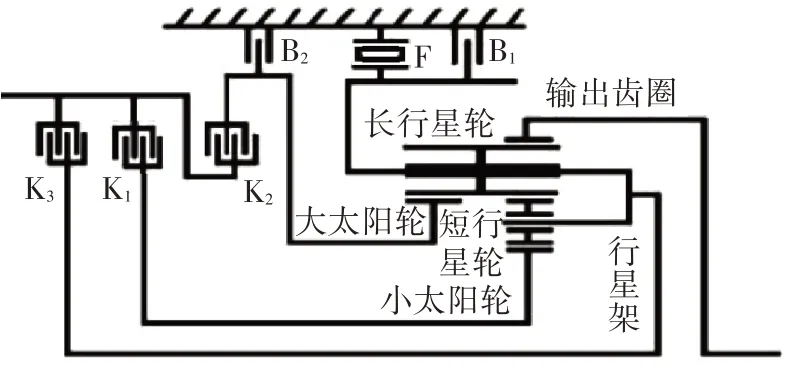
图2 01M/01N齿轮传动简图
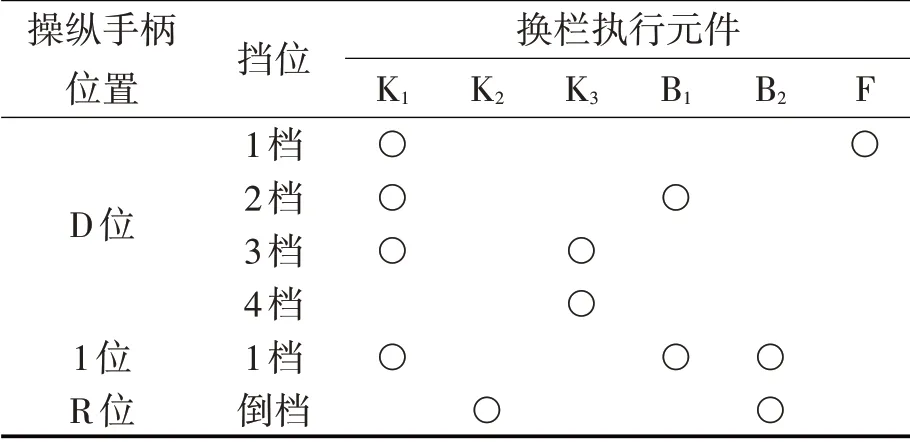
表3 01M/01N换挡执行工作表
在改用杠杆法讲解时,先说明用多行星排并联时杠杠图的绘制方法,将每个行星排视为一个垂直的杠杆,行星排之间的构件相互连接在杠杆图上表示为各支点之间的连接,调整杠杆垂直摆放方向,保证连接线不交叉。在两个杠杆重叠支点间长度相等的情况下,对杠杆的力臂进行调整,使各杠杆力臂长度比符合各自齿圈齿数与太阳轮齿数之比,并在图上标上换挡执行元件,这样将多个行星排的杠杆图合并为一个总杠杆图(01M 总图如图3 所示)。在绘制讲解时,不必查阅真实元件α值,只需要保证SP的长度大于RP长度即可。

图3 01M/01N杠杆总图
然后绘制四支点杠杆图,即将两根杠杆轴线重叠,仅绘制杠杆部分线图。因为变速器的输出轴一般都是与行星齿轮元件直接连接的,所以可以确定输出支点,并过输出支点绘制垂直于杠杆的输出线。再根据执行元件工作表确定每个挡位的输入点和制动点,将输入点速度绘制为单位1的矢量,绘制通过输入点矢量端点和制动点的射线作为挡位线,挡位线与输出线的交点即为输出转速(输入为1 时)。在画图过程中,可根据换挡执行元件的作用将它们标记在制动点和输入点端部。01M的四支点杠杆图如图4所示。

图4 01M/01N 杠杆图
很明显,杠杆法分析行星齿轮挡位传动时有三大优势:1.在于可以将所有挡位的速度线全部绘制在一幅杠杆图上,根据输出点速度线长度的变化很直观的体现出各挡位传动比变化效果。2.根据输入点、输出点和制动点跨越的杠杆数可以直观判断参与传动的行星排,如,图4中,1挡的输入输出制动点只跨越了二号杠杆,因此只有第二排行星齿轮参与传动;而2 挡因跨越了两个杠杆,故两排齿轮均参与传动。3.无需联立方程,即可快速根据相似三角形直角边之比算出传动比,如二挡传动比为S1S2/S1R1=(α1+α2)/(1+α1)。
进一步地引导学生观察,根据换挡平顺性的要求,One-Shift 原则(每次换挡只有一个执行元件分离,一个执行元件结合)在杠杆图上是如何体现的,以提高学生的观察思考能力和总结能力。
因为杠杆法简单直观的特点,可以在分析挡位传动路径和传动比时,可以提高效率和趣味性,极大地增强学生的学习兴趣。
(三)传授拓展应用
目前,在中高档轿车广泛采用的6 速自动变速器均为三排行星齿轮机构,其中由单排单级行星齿轮串联拉维那式并联机构的莱派特式占据绝对优势。最有代表性的是日本爱信(Aisin)公司生产的TF-60SN 系列自动变速器。除了为丰田配套外,此系列变速器还为诸多厂家提供配套,如欧宝赛欧,别克凯越,雪佛兰景程,福特嘉年华,东风雪铁龙C5、C4L、世嘉,标致508 均有采用[11]。图5 所示为采用莱派特式典型结构的Aisin09G。表4为其换挡执行工作表。
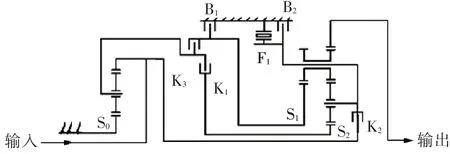
图5 Aisin09G齿轮传动简图
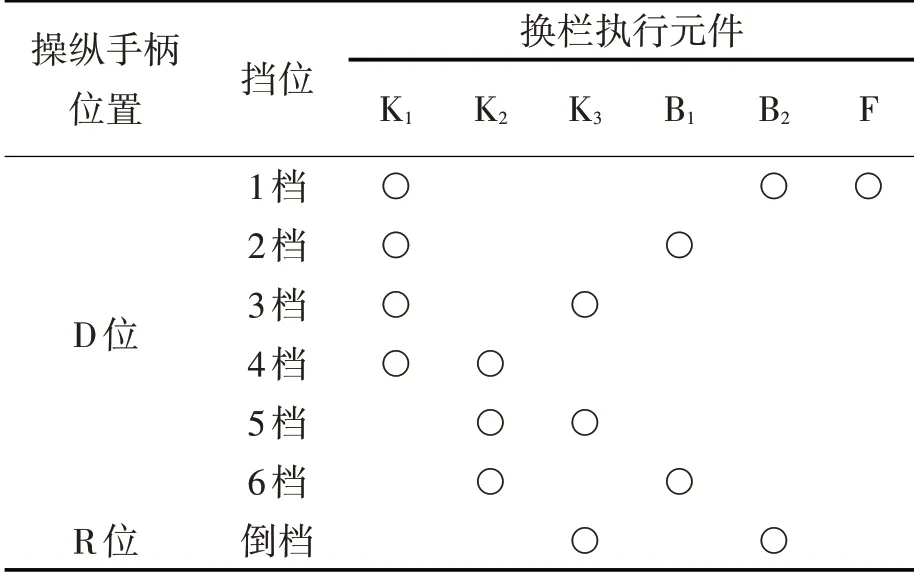
表4 Aisin09G换挡执行工作表
若采用公式法分析此类行星齿轮机构的动力传递路径,会显得既复杂又重复。并且,如果要解析传动比分布情况,每个挡位需要联立三个特征方程、两个连接方程和两个换挡方程,共计7 个方程求解,解析过程复杂。在实际教学中往往跳过直接给出传动比结果,使学生无法直观理解增加行星排和换挡执行元件对原有挡位传动比带来的影响。
在改用拓展杠杆法时,为了使图解更清晰,将相对于4 速变速器增加的固定速比单级单排行星排单独作为一个杠杆分析。在杠杆图上将这个新增的三支点杠杆与原有的四支点杠杆同纵轴摆放,此行星齿轮的输出转速会作为拉维那行星排的输入转速。
从09G 的杠杆图(图6)很容易看出六个挡位传动比的分布,并得出此款变速器无直接挡,1、4挡由头排末排齿轮共同传动,2、3 挡由三排齿轮共同传动,5、6、R 挡由头排和中间排齿轮共同传动。而后依据图形推算可以推算各挡传动比。此时可以再次验证上个环节总结的One-Shift 原则在此款上是否适用。
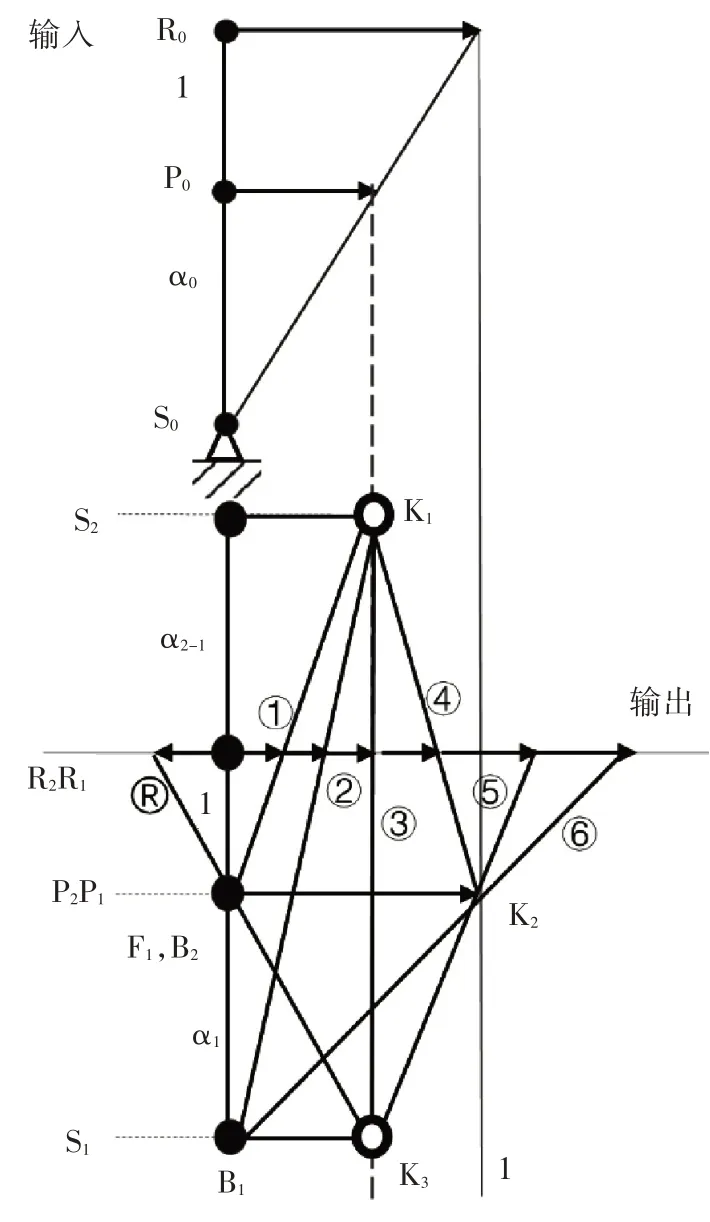
图6 Aisin09G杠杆图
接下来,进一步引导学生讨论思考从01M 的4 挡基础上扩展成09G 的6 挡,在杠杆图上有什么特征,这些特征是否能帮助大家在思考尽少改动的前提下实现更多可合理挡位。
(四)引导规律终结
根据上一环节探索的挡位扩展的方案,组织引导学生分组讨论依据杠杆图,在09G 的基础上有什么方法可以快速扩展挡位,分析按照图7 所示的杠杆图是否合适,并且思考与图7 对应,应在原09G 上做什么改变方可实现,并尝试修改图6和表4 以完成换挡执行元件概念设计和换挡规律表的设计。最后,给出皇冠AA80E 的传动简图(图8)和挡位执行工作表(表5)[12],与学生的方案对比,分析差异,寻找原因。培养学生勤于思考、善于总结、积极创新的精神。
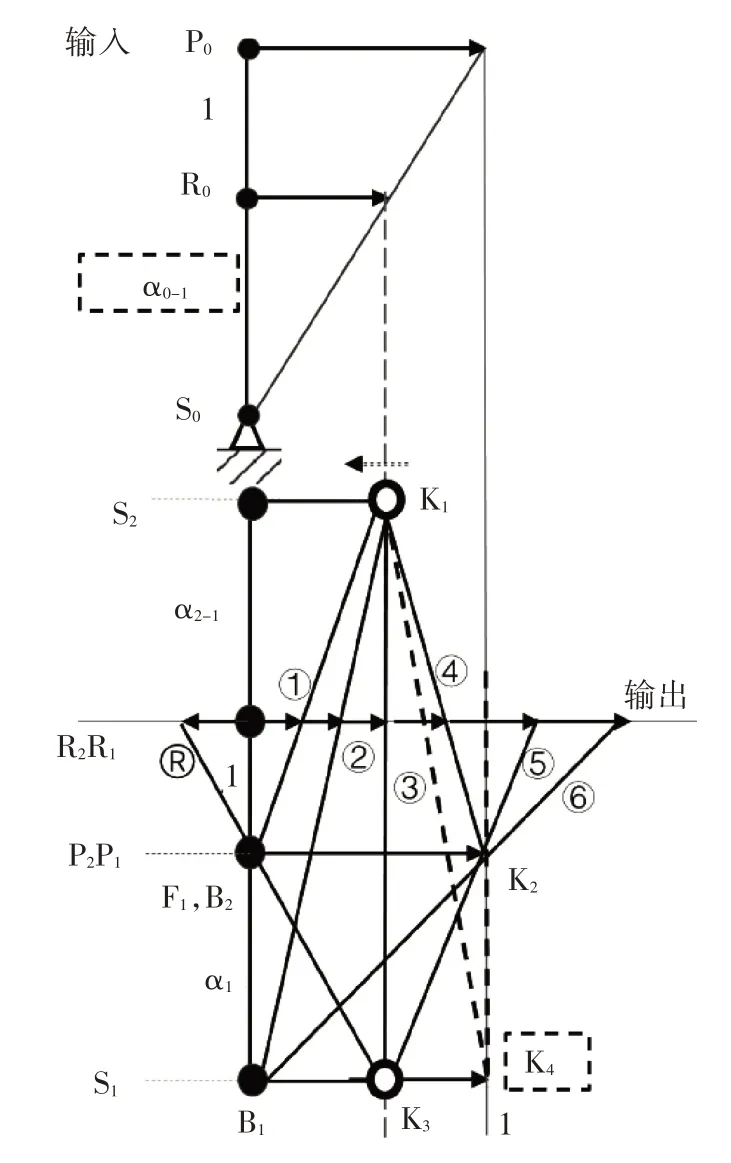
图7 某6-8挡拓展方案
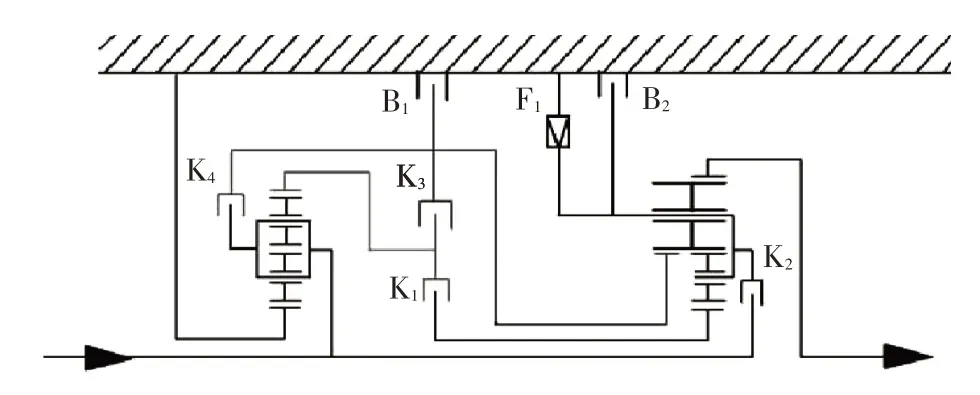
图8 AA80E齿轮传动简图
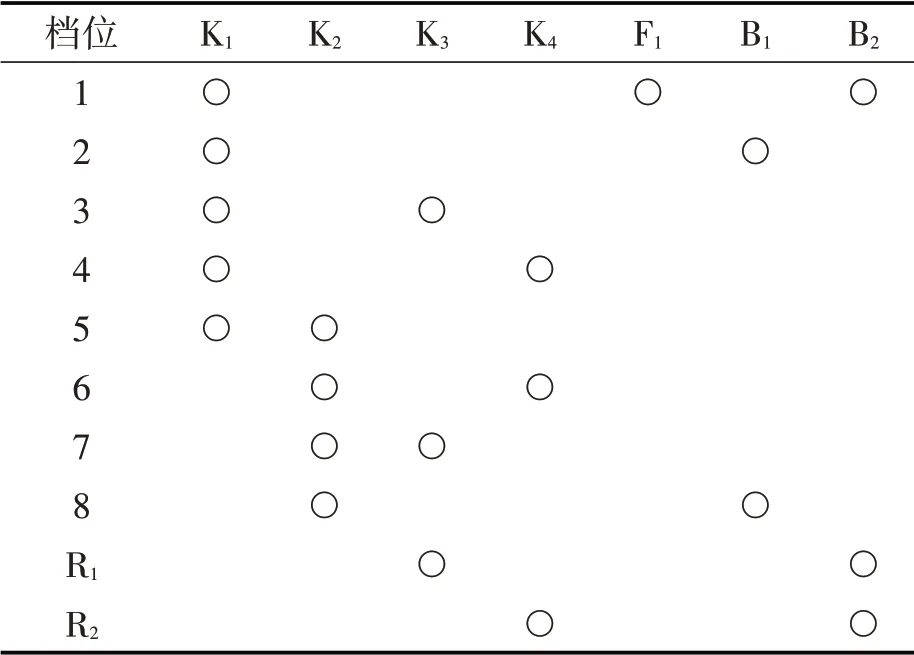
表5 AA80E换挡执行工作表
四、总结
行星齿轮传动机构一直是自动变速器学习的重点和难点。行星齿轮杠杆分析法形象、直观、简单、易学易用的特点,符合职业院校学生的认知特点。本教学方案以杠杆法为分析工具,筛选当前市场上典型主流变速器形成挡位拓展族系,完成了从单排行星齿轮机构杠杆原理到并联拉维那式再到单级+拉维那式6 速和8 速行星齿轮机构的认知、练习、应用、讨论和思考,这样不仅完成了对书本内容的合理更新,还有助于牢固掌握行星齿轮变速机构的工作原理,提高学生的学习兴趣,并培养学生善学、敏思、创新精神,文章内容可用于教材内容的更新,值得推广。
猜你喜欢
数学大王·低年级(2021年2期)2021-02-21
小学阅读指南·低年级版(2020年11期)2020-11-16
汽车零部件(2020年7期)2020-08-03
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
汽车维修技师(2017年6期)2017-11-18
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
湖南大学学报·自然科学版(2014年2期)2014-12-25