全断面掘进机健康管理系统的建模与仿真
2019-07-04 02:12张天瑞魏铭琦
中国工程机械学报 2019年3期
张天瑞,魏铭琦,刘 彬
(1.沈阳大学 机械工程学院,辽宁 沈阳 110044; 2.东北大学 机械工程与自动化学院,辽宁 沈阳 110819)
鉴于高效、安全等诸多特点,全断面掘进机(Tunnel Boring Machine,TBM)已在世界范围内被广泛应用.截止目前,政府批复的轨道交通建设规划城市约36个,仅“十三五”期间总投资将超过2万亿元[1-2],运营总里程预计将达到7 395 km.但是在施工过程中,常会出现诸如塌方、关键部件受损等务必暂停掘进的事故[3-4].相关研究显示:TBM因故停车后,排查故障原因与维修时间分别占70%~90%和10%~30%[5-6];分析维修成本,包括TBM在内的复杂装备经历了事后、定期和预测维修等阶段,今后将向着预测评估和健康管理方向进行发展[7-8].因此,从设备运行中产生海量数据出发,深度挖掘大数据信息,研究绿色再制造的TBM健康管理的关键技术,以改善掘进过程中的效率、效益和人员安全,意义深远[9].
1 系统总体设计
本文所构建的系统以状态监测和故障诊断为基础,建立面向服务的健康管理系统.图1为基于Web的面向服务架构(Service-Oriented Architecture,SOA)体系模型.
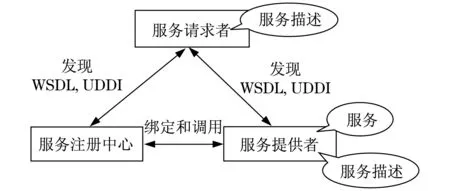
图1 基于Web的SOA服务体系模型Fig.1 Web-based service system model for SOA
TBM健康管理是综合考虑科学管理和技术服务,以便于更好地为装备的健康状况进行全方位管理[10].因此,基于图2所示健康管理核心思想,结合SOA方法的特点,建立包含操作层、服务组件层、服务层、业务流程层和表示层在内的健康管理系统体系结构,如图3所示.

图2 TBM健康管理核心思想Fig.2 Core idea for health management of TBM
2 TBM状态监测分析
TBM掘进状态特征参数的时间序列与其掘进模式紧密关联.纵然于相同掘进模式下,设备特征参数时间序列的变化趋势间有着较大差异,但仍能挖掘其存在的规律性[9].故其所有故障可分为突发型和渐发型.如齿轮折断等,因零部件的突然损坏所引起的故障为突发型故障;而诸如齿轮点蚀等问题的出现,使得设备性能循序变化,最终超出其许用值而导致的故障,为渐发型故障[11-14].

图3 健康管理系统体系结构图Fig.3 Health management system architecture diagram
2.1 建立与求解状态监测模型
2.1.1灰色预测方法
以设备掘进的时间序列为基础建立运行数据的灰色量,以数据累加和累减的方式使其灰色量形成白化量,进而建立预测模型进行状态预测,即为基于灰色理论的灰色预测方法.鉴于TBM复杂多变的掘进状态难以获取完整的设备信息,故定义为灰色系统.应用灰色预测方法对TBM掘进过程中设备整体或零部件的劣化程度进行科学预测,该预测流程如图4所示.
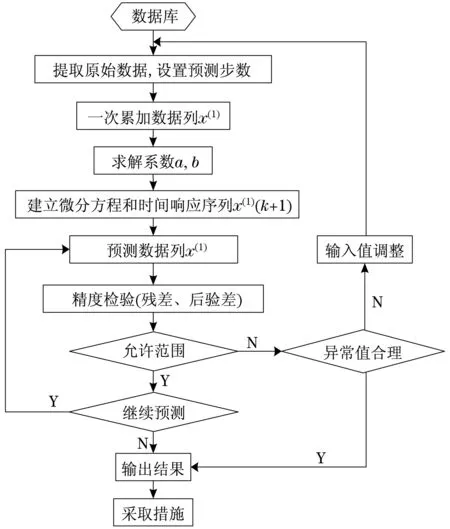
图4 灰色预测流程Fig.4 Grey prediction process
本文应用GM(1,1)模型进行预测,建立灰色预测的基本模型,以更好地反映TBM掘进状态变化趋势.
设GM(1,1)的建模序列为X(0),即
X(1)为X(0)经过一次累加生成的序列
令Z(1)为X(1)的紧邻均值生成序列
GM(1,1)灰微分方程模型为
(1)
式中:a为发展系数;b为灰色作用量.

(2)
式中:

(3)
GM(1,1)灰微分方程x(0)(k)+az(1)(k)=b的时间相应序列为
(4)
取x(1)(0)=x(0)(1),则
(5)
还原值为
(6)
式(6)即为灰色预测方程,由该灰色预测方程进行累减,对原始数据的预测值进行还原,通过对相对误差以及绝对误差等运算开展预测检验.
2.1.2建立并求解BP神经网络预测模型
人工神经网络模拟人脑神经网络及其思维方式,神经元便为最基本的神经网络单元,大量最为基本的神经网络单元通过相互联结构成神经网络.最基本的神经元模型组成主要包括输入、网络权值和阈值、求和单元、传递函数、输出等5部分[12].而BP神经网络可进行双向传播,有其自身的优越性,属于人工神经网络的一种.
根据预测模型,若x(0),x(1),…,x(n)为已获取到的某一掘进状态特征参数的n+1个时间序列样本,并由前n个样本观测值对第n+1时刻的值x(n+1)进行预测,图5为其预测模型.通过BP网络对TBM设备故障进行学习预测包括4个步骤.
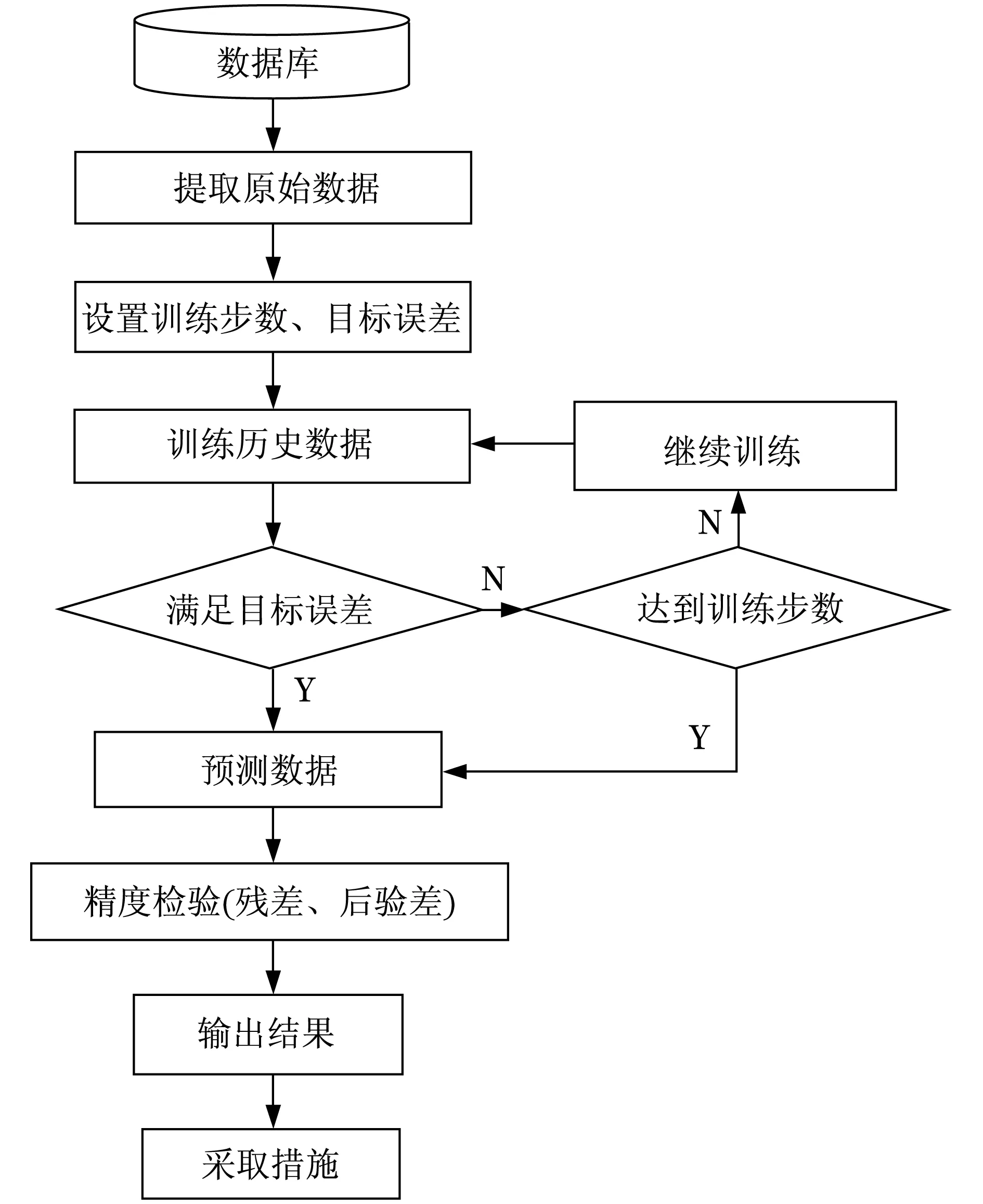
图5 神经网络预测流程图Fig.5 Neural network prediction flow chart
步骤1根据已知条件确定神经网络层的数量和各神经网络层包含的单元个数.一般由输入层、隐含层和输出层构成,其单元个数分别为m,1,1.
步骤2对时间序列样本x(0),x(1),…,x(n)分组,各组包含m+1个值,其中输入值为前m个,输出值为第m+1个.具体表达如表1所示.
步骤3由BP算法对神经进行训练以确定其连接权.
步骤4以x(n-m+1),x(n-m+2),…,x(n)等m个某状态特征参数的时间序列作为神经网络输入,通过训练后的神经网络模型进行状态预测,其输出即为第n+1时刻的状态预测值x(n+1).
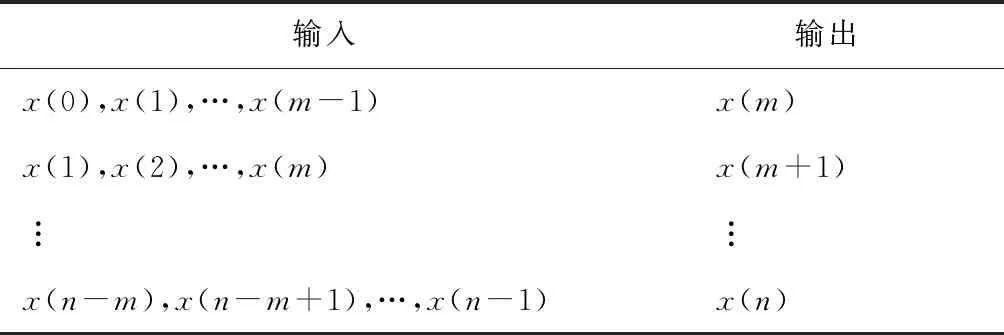
表1 BP神经网络训练的输入输出样本Tab.1 Input and output samples of BP neural
2.1.3预测模型检验
该过程包含残差检验和后验差检验两部分.
(1) 残差检验是指对原始数据和预测数据之间的绝对误差、相对误差进行计算.
绝对误差为
相对误差为

(2) 对于后验差检验而言,先对原始序列x(0)(i)的均方差进行计算,即
而
然后计算残差序列ε(0)(i)的均方差,即
而
方差比为
(7)
小误差概率为
(8)
表2为预测精度等级划分表,据此确定预测模型的预测精度.
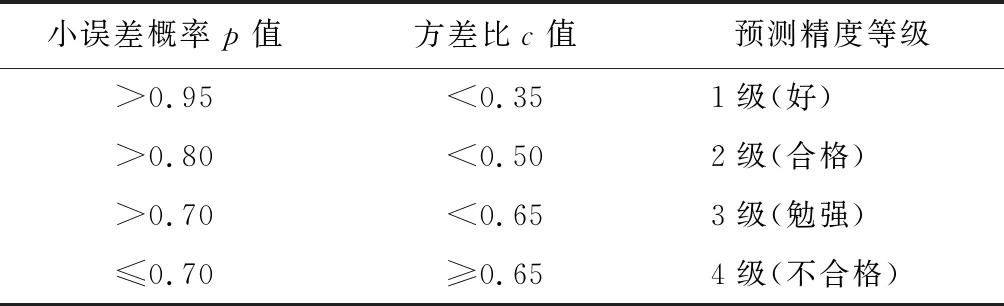
表2 预测精度等级表Tab.2 Prediction accuracy rating table
TBM的很多关键部件均采用液压装置作为其驱动力,而作为表征液压装置健康与否的液压油温度,其变化范围是本文要考虑的关键因素之一.由于液压油温差波动相对较小,宜采用GM(1,1)模型进行拟合以及预测;而TBM主轴承的振动幅值波动较大,适合由BP神经网络进行拟合以及预测.以两个特征状态参数的30组历史数据进行实验,数据源自甘肃引洮工程1期9#隧洞,对数据进行抽取的频率为1 h.其中,由前25组数据作为样本进行训练,训练后,由最后5组数据进行模型检验,结果如表3所示.

表3 状态特征参数预测结果Tab.3 Prediction results of state characteristic parameters
由表3可知:在误差允许的范围内,GM(1,1)预测模型和BP神经网络预测模型最大可对状态参数进行5步预测,获知未来5 h内的工作状态.但更长时间内工作状态的预测精度会随预测步数增加而降低.其改进措施包括灰色预测由残差模型进行修正,神经网络预测通过增加网络输出单元进行修正.鉴于TBM设备为实时监测,该模型可由1级预测精度对未来5 h内设备的运行情况给予预测,以满足设备使用要求.
3 基于小波包算法的能量特征向量提取
本文以小波包能量谱为基础进行故障诊断,即以能量方式表示小波包的分解结果[12],并以各频带内信号的平方和作为其标志开展诊断过程.


(9)

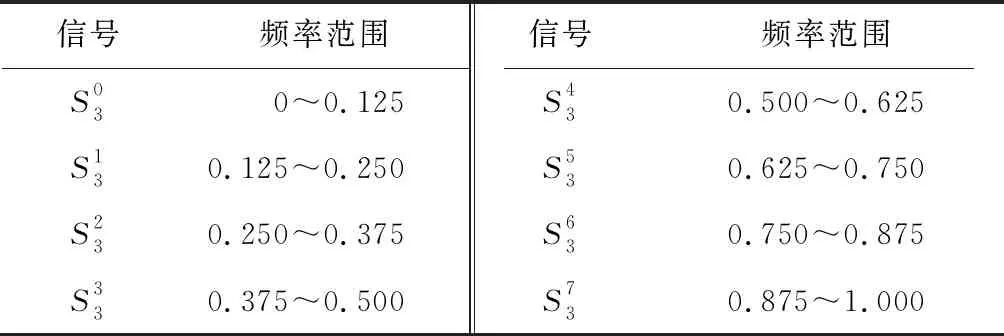
表4 各特征信号频率范围Tab.4 Frequency range of each characteristic signal

(10)
因为离散点的个数是n,则j=1,2,…,n.
步骤4相对能量特征向量构建.对小波包全部能量进行定义:
(11)
对一频段内相对小波包能量进行定义:
(12)
所构建的小波包相对能量特征向量为
(13)
将式(13)作为神经网络输入进行故障诊断.
4 故障诊断方法建立
本文建立了一种不依赖于模型的神经网络故障诊断方案,即采用基于小波包-BP神经网络的方案开发状态监测与故障诊断系统.
4.1 BP神经网络学习过程概述
采用BP神经网络进行故障诊断:首先,获取相当数量的训练样本进行神经网络训练,以得到确定期望权值、阈值等的故障诊断神经网络;其次,由经过学习的BP神经网络进行故障诊断,过程即采用神经网络前向计算的过程.
4.2 最快速下降BP学习算法
若迭代次数为k,则对各层权值和阈值进行修正,即
(14)
式中:z(k)为连接各层间的权值或阈值;g(k)=∂Ek/∂z(k),为k次迭代后,输出误差相对权、阈值的梯度向量;“-”为梯度反方向,即最快速下降方向;α为学习速率常数,由训练而定.
以只有1个输入样本的2层神经网络为例,若有p个输入层神经元,q个输出层神经元,则
式中:E(k)为k次迭代后的误差;E[e(k)]为k次迭代误差函数;Ti为i阶目标输入向量;ai(k)为k次迭代输出向量;f为迭代误差常数;wi,j(k)为k次迭代神经元权值;a为学习速率常数;θ为权值修正量.
如果2层神经网络有n个输入样本,则
(17)
以上过程表明,权值和阈值是在所有样本输入并得出总误差后给予修正的,即批处理法.该方法在样本数较多时,可获得较快的收敛速度.
2层神经网络权值空间维数nw=m×p+p×q,阈值空间维数nθ=p+q,故对所有权值和阈值误差进行修正,其误差空间维数应为nE=nw+nθ=m×p+p×q+p+q.
故神经网络误差曲面是一个难以在三维空间进行表示的极复杂超曲面.所以,经过模型简化,以仅有一个输入神经元的单层神经网络举例,即经由一个输入样本数绘制误差曲线,可更直观观察并调整输出误差.
给定训练样本集p=[-5.8 -5.1 -4.1 -4.04 4.1 5.2 5.1],输出目标集T=[00.9 0.89 0.14 0.11 0.03 1.06 1.07],由Matlab计算,获得如图6所示二维误差的曲面图.
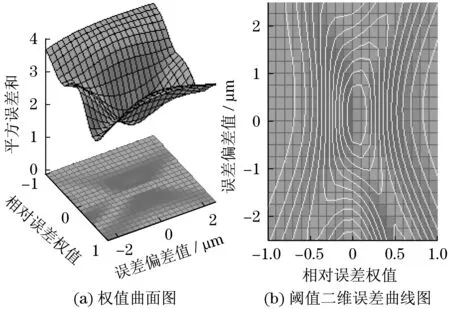
图6 计算获得的权值和阈值二维误差曲面图Fig.6 Obtained weight and threshold two-dimensional
5 系统的搭建与运行
本文搭建了可在网页上进行浏览的系统,在地址栏中键入地址:http://xx.xx.xx.xx:8080/enginehealth /index.aspx,访问系统主界面,主要功能有:用户管理、项目管理、数据采集与分析、状态监测、故障诊断、远程培训、系统管理和辅助功能等子系统.本文仅对故障诊断子系统功能展开介绍.
诊断过程包含“数据输入” “分解结果”“样本和待检信号特征向量”3部分.输入小波包分解层数,分解通道信息和一次分解采样点数,显示样本特征向量和待分析信号特征向量.实验时,通道1,2和3对应测点1,2和3,其输入信息参见图7.点击“分解结果”,从“待检信号”处获得分解重构后的3层小波包能量特征值.

图7 能量特征值提取与显示界面Fig.7 Interface for extracting and displaying
在故障诊断神经网络前,系统显示图8界面,根据提示设定参数后,点击“确定”键进行数据保存,进而点击“开始学习”键进行神经网络对样本的学习过程.完成学习后,获得如图9所示网络误差性能曲线图.而后对监测到的信号进行诊断,直到出现诊断结果.

图8 训练参数设定界面Fig.8 Training parameter setting interface

图9 网络误差性能变化图Fig.9 Network error performance variation diagram
若无期望结果,系统弹出提示界面.由人工检查发现故障,并输入特征值,完成BP神经网络的学习过程,以丰富故障诊断系统数据库,为今后诊断提供判据.
6 结论
本文以TBM主变速箱为例,对TBM的状态监测和故障诊断过程进行了深入研究,得出以下结论:
(1) 文中采用了GM(1,1)和神经网络预测模型,通过预测分析预知掘进状况,以减少事故频次.由计算实例可知,有效地提高了模型的预测精度,使得设备能够达到1级预测精度预测5 h后的设备运行情况.
(2) 介绍了基于小波包进行数据采集提取能量特征向量的算法,达到了既能实时处理信号,又能保留完整信号高、低频信息之目的.
(3) 设计BP神经网络最快速下降的学习算法.
(4) 利用虚拟仪器和Matlab软件开发TBM状态监测与故障诊断系统,运行结果证明了本文所采用技术与理论的可行性、正确性.
(5) 通过二次学习影响系数加权算法对各特征权值的调整,解决了经验获取模糊特征分量不准确的问题.进一步研究可考虑同时采集同一部件温度、振动、压力等信号进行融合,已完成更为全面、准确的诊断过程.
猜你喜欢
高技术通讯(2022年7期)2022-09-28
成都信息工程大学学报(2022年3期)2022-07-21
山西电子技术(2022年1期)2022-02-28
成都信息工程大学学报(2021年1期)2021-07-22
装备制造技术(2020年2期)2020-12-14
小学生学习指导(低年级)(2020年3期)2020-06-02
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25