
基于收缩反步的四旋翼飞行器控制
2019-06-28 06:27曹立佳卢天秀
四川轻化工大学学报(自然科学版) 2019年3期
张 果,曹立佳,卢天秀
(1.四川轻化工大学a.自动化与信息工程学院;b.数学与统计学院,四川 自贡 643000;2.四川省智慧旅游研究基地,四川 自贡 643000)
引 言
四旋翼无人机在控制台的控制命令下,可以进行垂直起降、空中悬停、横向飞行等动作,可以用很小的代价完成各项任务,具有很强的实用性,如用于近地军事侦查、影视拍摄、甚至快递业务等[1]。四旋翼无人机作为一个典型的多输入、多输出、欠驱动、强耦合的非线性系统[2],其控制算法在市场中大多数为PID 控制,而研究最为广泛的是在李雅普诺夫稳定性分析基础上的各类控制算法,如自适应控制算法、鲁棒控制算法、最优控制算法、滑膜控制算法。近来,基于连续介质力学和微分几何的收缩理论被用作最新的非线性系统收敛性分析方法,其核心增量稳定性分析不需要确定系统的平衡点。相对于李雅普诺夫稳定受扰动后会产生平衡点位移的情况,由于不需要确定系统的平衡点,基于微分分析的收缩理论依然可以对系统进行稳定性分析,给控制系统的设计带来了很大便利。在李雅普诺夫方法的研究中,文献[3]针对固定翼无人机的姿态和速度控制中存在不确定和外部扰动的问题,设计自适应超螺旋滑模干扰观测器和控制器,实现了固定翼无人机对速度指令和姿态指令的有限时间精确跟踪。文献[4]建立了无人机巡检过程的飞行运动及优化控制模型,以满足无人机巡检的约束条件,并提出了鲁棒自适应容错控制算法。反步法是一种针对严反馈系统,通过分步构造虚拟控制量,以满足系统镇定的控制方法,文献[5]考虑了四旋翼飞行器模型参数不确定和阵风干扰的情况,设计了一种自适应积分反步(Integral Backstepping,IB) 控制方法。文献[6]受收缩理论的启发,设计了一种动态解耦非线性系统的鲁棒分布式模型预测控制。对于收缩理论的研究,文献[7]使用收缩理论解决了一类同步动态系统网络的同步问题。文献[8]提出了一种基于收缩理论指数稳定性的自动列车执行器饱和自适应鲁棒控制方法。文献[9]利用收缩理论讨论了水下航行器的增量稳定性。文献[10]针对系统状态或未知量估计问题,使用收缩理论做了状态估计设计。文献[11]使用收缩分析对非线性随机系统观测器的增量稳定性进行了讨论。文献[12]使用滑模变结构控制(SMVSC) 方法实现了固定翼无人机的期望轨迹跟踪。文献[13]提出了一种基于积分型的反步控制方法应用于四旋翼飞行器的稳定飞行及轨迹跟踪控制。文献[14]针对一类不确定非线性参数严反馈系统,提出基于收缩理论的自适应动态面控制方法。然而,现有文献对飞行器系统控制器的设计大多使用李雅普诺夫方法,考虑到平衡点位移的情况与构造能量函数时的复杂性,李雅普诺夫方法在调节参数时有一定难度,而收缩分析无需求解系统平衡点,满足雅克比矩阵负定条件就能调节参数,给控制器的设计带来很大便利。本文将收缩理论应用于复杂四旋翼飞行器系统,提出了一种收缩反步(Contraction Backstepping,CB) 控制算法,并对其增量稳定性与李雅普诺夫稳定性进行对比分析,证明了控制器的合理性。
1 收缩理论基本原理
考虑平滑非线性系统

其中,状态x 的轨迹随时间的指数收敛性可用虚拟位移进行分析,虚拟位移表示空间中同一时刻两个点之间的线性微小增量,记作δx,对δx 进行坐标变换得:

其中,Ω(x,t) 为一致逆方阵,定义表示黎曼空间的度量一致对称镇定矩阵P = ΩTΩ,那么由微分几何知识可得,变换后的轨迹平方距离为:

该距离随时间的变化率可写为:


其中,λmax表示矩阵F 对称部分的最大特征值,计算可得:

其中,δz0表示初始状态的虚拟位移,如果λmax是一致严格负定的,那么δz 指数收敛于0。
若方程(1) 受到有界扰动d(x,t) ,即有:


在二阶闭环系统的收缩分析中,采用反馈联接方式的虚拟位移可表示为:

当且仅当每个子系统收缩时,整个系统是收缩的。
2 四旋翼飞行器动力学模型
四旋翼飞行器可看作是一个具有六个自由度和四个输入项的欠驱动刚体,其推力由四个螺旋桨产生,可通过指令控制四个螺旋桨以使无人机保持一定的姿态并跟随所需的航路飞行,如图1 所示。
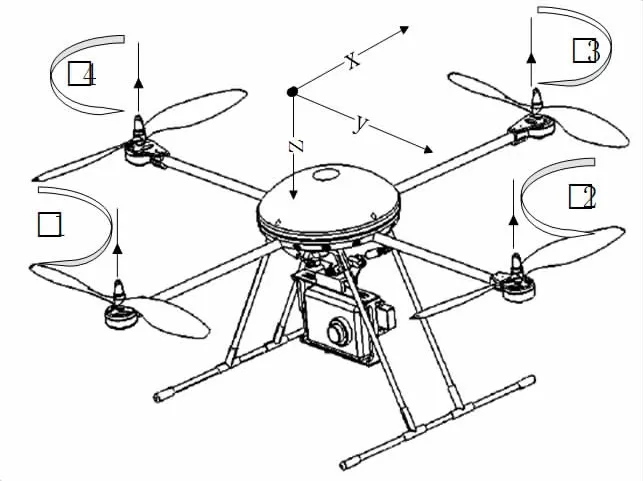
图1 四旋翼飞行器
四旋翼飞行器的动力学方程表示为:

其中,Ix、Iy、Iz为惯性矩阵,是飞行器空气动力中外力和扭矩重要参数; b 表示阻力系数; d 为升力系数; m 为无人机质量; g 为重力加速度; l 为机臂的长度; Jr为转子惯量;为滚转角,θ 为俯仰角,ψ 为偏航角; x、y 为固定x -y 平面上的无人机质心坐标,z 为高度; ωi(i = 1,2,3,4) 为四旋翼无人机的四个旋转角速度,与对应的四个输入项Ui关系可表示为:
3 收缩反步控制
3.1 控制策略
本文的采用双环控制策略,如图2 所示,外环位置真实值与期望值作差,解算出控制高度的输入项与水平位置输入项,反解出期望的姿态角后进入内环姿态控制,解算出控制姿态的输入项。
3.2 控制器设计

其中,

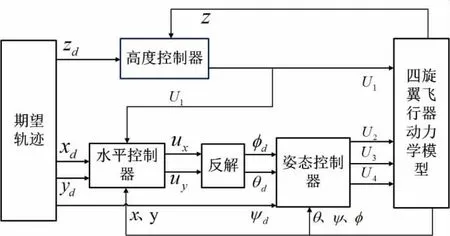
图2 双回路控制结构框图

该子系统的虚拟位移可表示为:

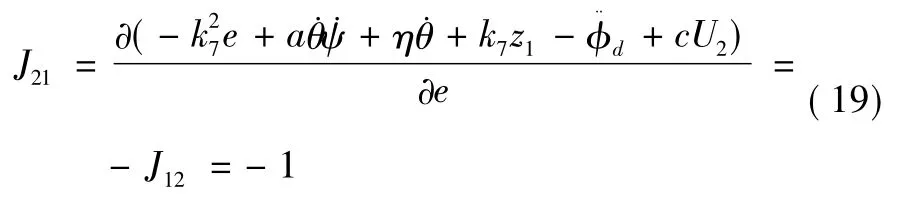
其中,雅克比矩阵J11表示为:

为保证雅克比矩阵J11一致负定,虚拟控制输入β1() 可选择为:

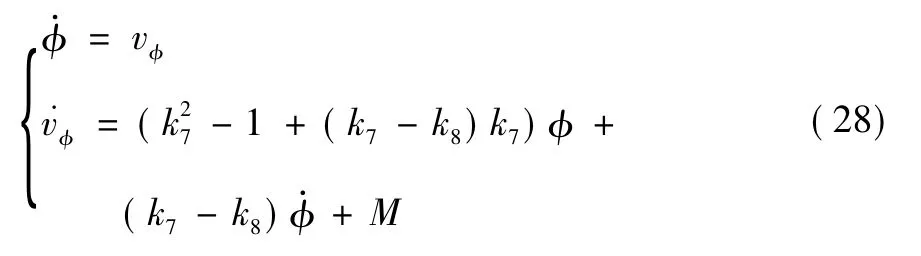
其中,k7>0。误差动力学可缩减为:

对z1求导后将式(15) 和式(16) 带入可得:
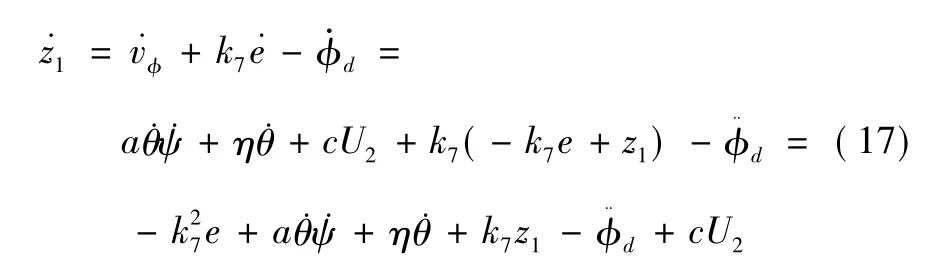
因此,式(16) 和式(17) 的虚拟位移状态空间形式可表示为:

为保证z1的收敛性,同时形成反馈联接,需满足J12= -J21,并且J22<0,即:

控制器U2可选择为:

其中,k8>k7。
同理,四旋翼飞行器系统(9) 的飞行器高度控制器U1以及姿态控制器U3、U4表示为:
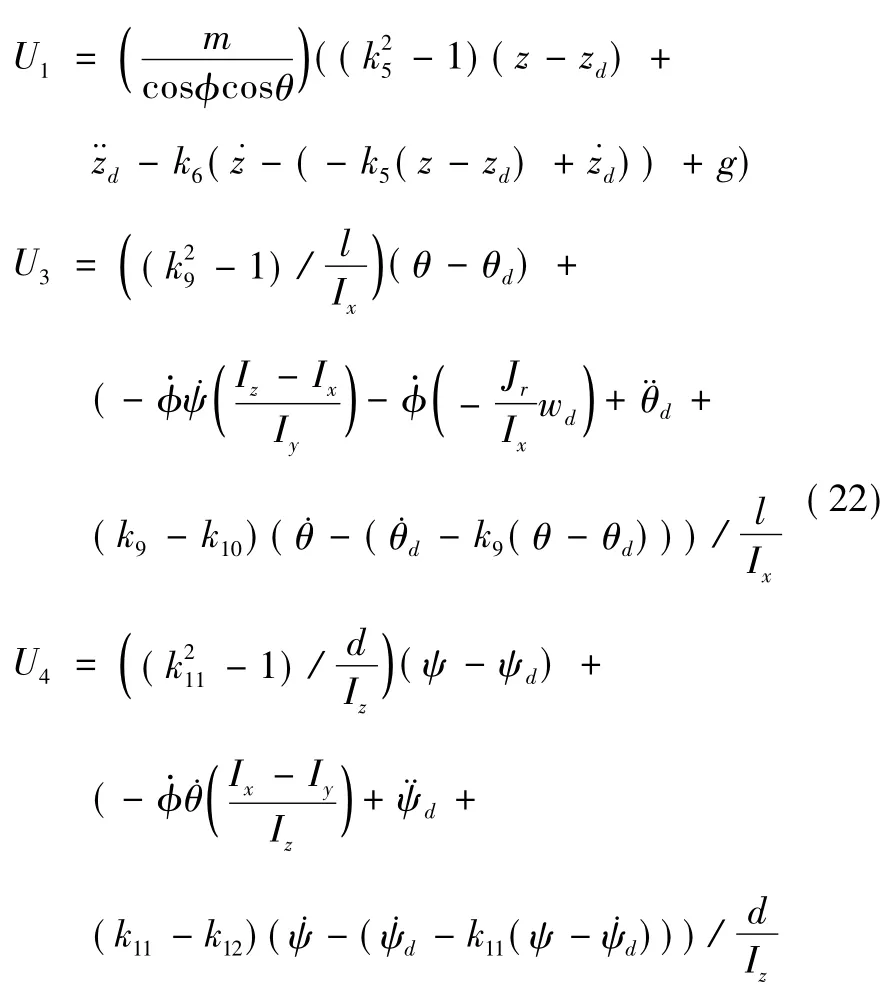
其中,zd、d、θd、d 为期望值,k5~k12为控制增益。在反解模块中,可以通过水平控制器来推算四旋翼飞行器

则水平方向上的子系统可改写为:

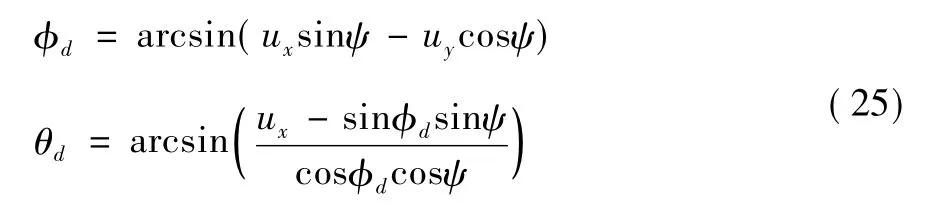
根据式(24) 可推导出满足收缩增量稳定性的控制器:
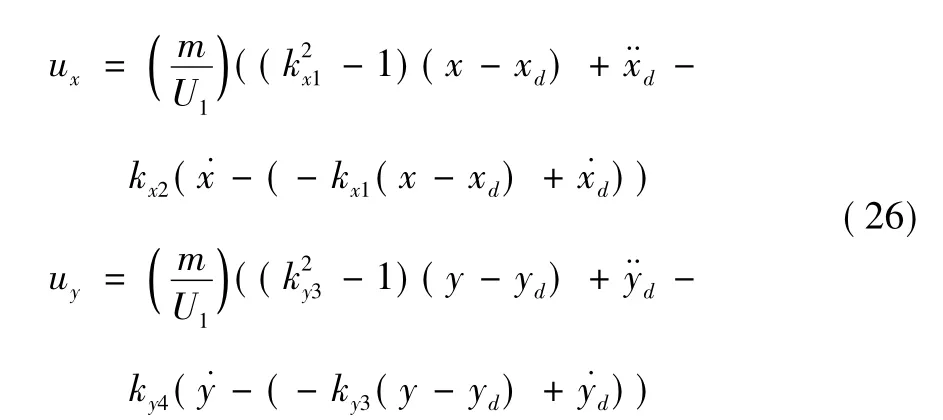
其中,kx1、kx2、ky1、ky2为控制增益。
3.3 稳定性分析
将控制输入U2带入虚拟位移系统(18) ,其闭环反馈联接的形式可表示为:

那么λmax(J) = -k7∨(2k7-k8+1) ,显然存在k7、k8使λmax(J) 一致严格负定,使δe →0、δz1→0。
为进一步说明由收缩分析设计的控制器是合理的,下面使用李雅普诺夫方法验证式(11) 平衡点稳定性。将式(21) 带入式(11) 得:
其中:

式(28) 状态空间形式可写为:

然后在系统的平衡点处求解方程
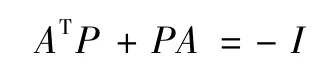
在Matlab 中,令k7= 1 ,k8= 3,输入命令P=lyap(A’,I) ,进一步,由eig(P) 给出矩阵的特征值:

由此可以证明系统在平衡点也是李雅普诺夫渐进稳定的。
4 计算机仿真实验
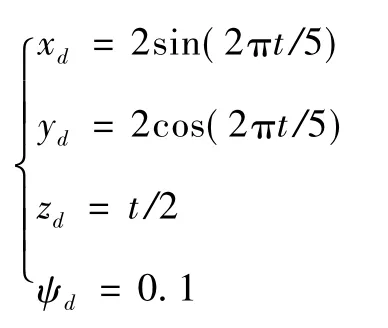
本文实验仿真平台为MATLAB。考虑四旋翼无人机在无干扰环境中飞行,选取仿真步长τ = 0.01,设定的期望轨迹为:
四旋翼无人机参数见表1,各控制器的相关参数见表2。
表1 四轴飞行器参数
表2 控制器相关参数
在表1 和表2 给出的参数条件下,应用积分反步方法与收缩反步方法设计的控制器,仿真效果如图3 ~图7 所示,其中实线所示为积分反步方法的结果,虚线所示为收缩反步方法的结果。
飞行器在水平方向x、y 和竖直方向z 的位置误差如图3 所示。
由图3 可知:运用收缩反步方法,飞行器在x、y 方向上的位置误差波动更小(约为积分反步方法的四分之一) ;运用收缩反步方法,飞行器在z 方向上位置误差几乎为零,远远小于积分反步方法的误差。因此,从位置误差上看,用收缩反步方法能较好地进行飞行器跟踪。
飞行器的俯仰角θ,滚转角φ 和偏航角ψ 及其误差如图4 和图5 所示。

图3 飞行器的位置误差曲线
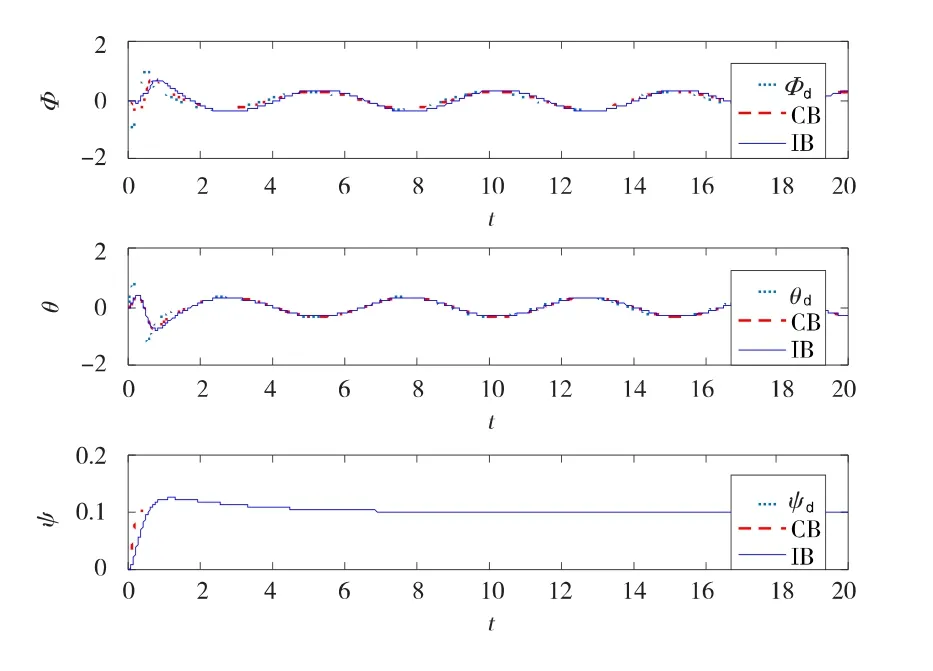
图4 飞行器的姿态角
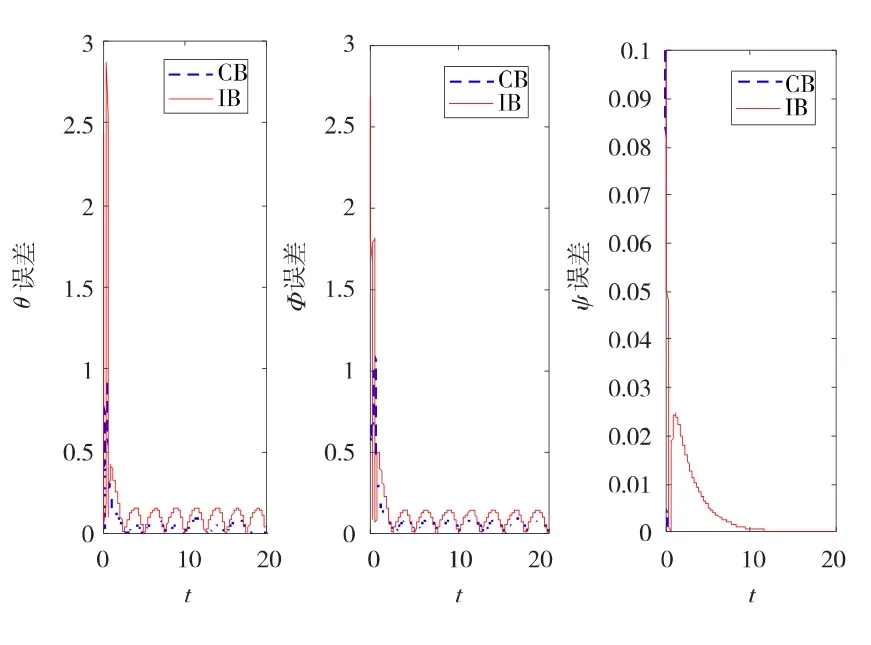
图5 飞行器的姿态角误差
飞行器的直观运动轨迹的仿真结果如图6 和图7所示,其中,图6 为三维运动轨迹(立体显示) ,图7 为俯视运动轨迹(平面显示) 所示。
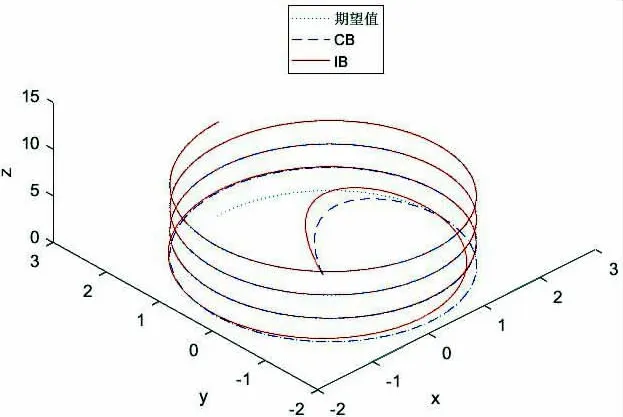
图6 三维轨迹
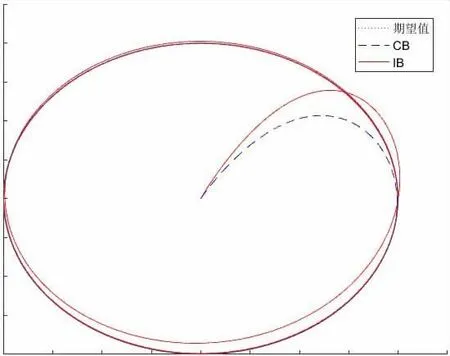
图7 俯视轨迹
由图6 和图7 可知,应用收缩反步方法设计的控制器,飞行器的三维运动轨迹与期望值相差不大,飞行器的俯视运动轨迹与期望值几乎完全重合。
此外,从图3 和图5 可知,对比于积分反步法,采用收缩反步法的飞行器接近期望轨迹消耗的时间更少,控制效果更稳定,状态误差更小,尤其在高度位置z 的跟踪上尤为明显。从图4 ~图7 的仿真结果来看,应用本文提出的收缩反步控制算法,飞行器飞行更加稳定,轨迹跟踪性能更强。
对于输入信号的仿真,飞行器的控制输入如图8 所示,四旋翼的电机转速如图9 所示。
由图8 和图9 可知,运用收缩反步方法得到的电机转速没有超过飞行器实际可承受的电机转速的范围,即,对飞行器的物理性能要求在可行范围之内。
5 结束语
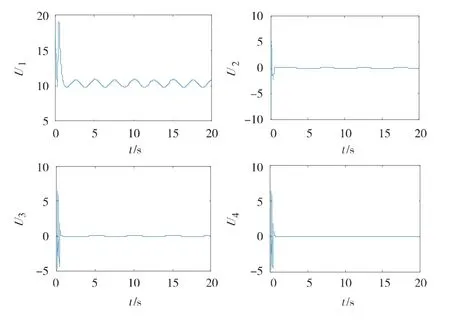
图8 飞行器的控制输入

图9 飞行器的电机转速
在研究收缩理论的基础上,完成了对于多输入多输出四旋翼无人机的控制器设计。对比于IB 控制算法,本文提出的收缩反步控制能实现状态的快速收敛,稳态误差更小。由于应用反步控制技术,控制器设计受到系统严格反馈的限制,后续的研究将对其增量稳定性进行分析,讨论模型在参数不确定、有外部干扰的条件下的自适应控制器的设计方法。
猜你喜欢
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
大连工业大学学报(2021年1期)2021-03-01
沈阳大学学报(自然科学版)(2020年1期)2020-02-18
自动化学报(2019年8期)2019-09-15
电子制作(2019年9期)2019-05-30
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2016年8期)2016-11-16
