
智能迎宾机器人的研究与设计
2019-06-27 10:01陈落根方志炜张东海
上海电气技术 2019年2期
陈落根, 褚 佳, 方志炜, 许 健, 张东海, 陈 文
杭州娃哈哈精密机械有限公司 智能装备研究所 杭州 310018
1 研究背景
迎宾机器人是一类可以与人进行交互,具有迎宾、指引、对话、帮助、提示、引流、促销等功能的机器人,具有极大的市场潜力,同时对快速消费品营销方式有重大促进作用[1-2]。目前,国内外机器人公司和科研机构都将迎宾机器人作为未来吸引实体流量的重要入口,投入大量资源进行开发和推广。近几年,随着人工智能的快速发展,迎宾机器人在语音交流、人脸识别、自主移动控制方面有了巨大进步。
迎宾机器人的主要代表产品有日本软银的佩珀机器人、中国科学技术大学的晓医机器人、科大讯飞的佳佳仿真人等,依次如图1、图2、图3所示。这些机器人虽然技术先进,但是价格十分昂贵,动辄几十万元,不利于在市场上推广使用。
笔者研发的智能迎宾机器人具有一定自主导航能力、现场操控能力和远程遥控能力,具备自主对话与辅助对话功能,且成本不高,科技感十足,对于提高公司科技形象可以起到事半功倍的效果,具有一定的应用价值和推广前景。

图1 佩珀机器人

图2 晓医机器人

图3 佳佳仿真人
2 功能分析
笔者为娃哈哈公司30周年庆典设计了一对智能迎宾机器人。机器人需要有礼貌地迎送宾客,同时需要与客人互动,宣传娃哈哈公司,具有仿人类外形、肢体动作互动、语音交互、面部表情、可移动等功能。在设计中,在头部的眉毛和嘴巴处嵌入发光二极管灯,配合各个场景做出不同的面部表情,并播放迎送语音,实现人机互动。通过设计使机器人能够移动,头部和手臂能够实现点头和摆臂等肢体动作,与客人进行热情互动。
3 性能指标
智能迎宾机器人具有接近成人的长、宽、高尺寸,男版高170 cm,女版高160 cm。机器人能够遥控行走和自主行走,具有从文本到语音的播放功能和语音交互功能,并能够通过现场移动电话蓝牙控制和远程虚拟专用网络控制。机器人手臂具有多自由度功能,可以完成挥手、握手等动作。机器人头部具有多自由度功能,可以完成点头、表情等功能。机器人能够将现场情况通过视频传回控制端,移动速度可达30 m/min,爬坡能力可达5°,连续工作时间长于8 h。
4 机械系统设计
4.1 整体结构
智能迎宾机器人的机械结构主要分为底盘、机身、手臂及头部四个部分。其中,底盘负责机器人的行走运动,手臂可以做出简单的肢体动作与客人互动,机身支撑整个机器人零部件,机身内部可以布置控制系统模块[3]。机器人内部骨架采用铝合金型材搭建,外壳采用三维打印技术制作,材料使用聚乳酸。机器人整体设计模型如图4所示。

图4 智能迎宾机器人设计模型
4.2 头部
智能迎宾机器人需要实现表情互动,完成点头、摇头、微笑、口形变换、眨眼等动作。在机器人颈部设计了两个旋转轴,实现点头和摇头动作,均由舵机驱动。眉毛处设计了条形发光二极管灯,通过控制灯的变换来模拟眨眼表情。嘴巴处设计了发光二极管灯,通过控制灯的变换来实现微笑和口形变换动作。两只眼睛黑色部分为摄像头,用于监控现场情况。发光二极管灯的变换配合颈部的运动,组合成机器人的多种表情,实现人机互动。智能迎宾机器人头部模型如图5所示。
图5 智能迎宾机器人头部模型
4.3 手臂
设计手臂使其不但在外形上像人体手臂,而且在功能上也可以模仿人体手臂完成摆臂、挥手、握手等简单动作[4-6]。对于手臂自由度的分布,德国机器人学专家Adam Morecki提出了肩部三个、肘部一个、腕部三个的七自由度划分理论[7-9]。笔者设计时对手臂动作的要求不高,因此采用六自由度仿人手臂构型,关节为转动形式,结构较为简单,并且易于控制。所有手指通过绳索驱动,只有一个自由度,可以实现抓握动作。智能迎宾机器人手臂自由度如图6所示,构型方案如图7所示,设计模型如图8所示。

图6 智能迎宾机器人手臂自由度
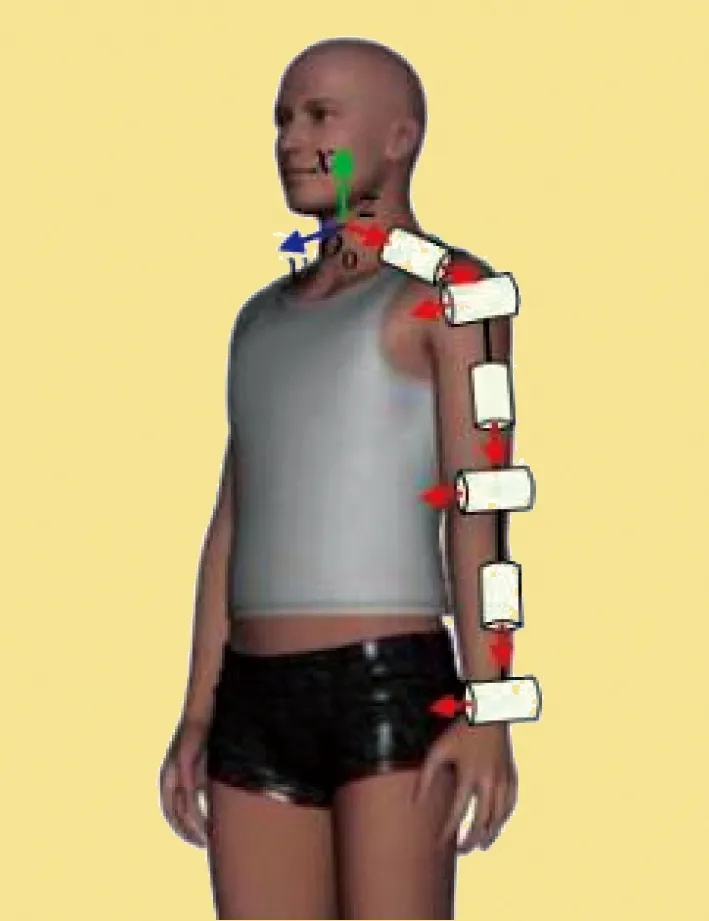
图7 智能迎宾机器人手臂构型方案
4.4 底盘
智能迎宾机器人的活动场地一般比较平整,活动空间较小,通常采用轮式结构,如图9所示。机器人底盘由安装架、两个万向轮、两个驱动轮组成,其中两个万向轮前后对称布置,两个驱动轮左右对称布置。底盘的驱动系统包括直流伺服电机、行星齿轮减速器、伺服驱动器,采用差动运动方式,通过控制左右轮的不同转速来实现底盘的不同运动。这种底盘结构简单,动作灵活。

图8 智能迎宾机器人手臂设计模型

图9 智能迎宾机器人底盘结构
5 控制系统整体框架
智能迎宾机器人控制系统用于实现机器人行走控制、自主导航、语音交互、安全防护、远程监控等功能[10-11]。控制系统整体框架如图10所示,可分为上位机控制和底层控制两个部分。机器人上位机控制由蓝牙控制终端、远程计算机控制终端、远程监控终端组成,是人机操作的主要接口,提供操作界面和监控界面。

图10 智能迎宾机器人控制系统整体框架
机器人底层控制部分由任务调度模块、同步定位与建图(SLAM)导航模块、安全防护模块、语音交互模块、监控模块、运动控制模块、行走执行模块、动作执行模块组成,负责解释和执行上位机指令,检查机器人的安全情况,上传机器人监控视频与语音等信息。任务调度模块是机器人底层控制的核心模块,执行指令解释,生成任务并分配至其它模块,管理其它模块的运行。SLAM导航模块采用激光雷达导航技术,创建环境地图,并可以自主生成路径。安全防护模块负责检测机器人运行过程中的失控碰撞等风险因素,当出现危险情况时,及时通知任务调度模块进行紧急规避。语音交互模块实现人机语音交互功能。监控模块建立监控服务,将机器人摄像头和传声器等设备的监控内容向监控端传播,实现监控功能。运动控制模块负责执行任务调度模块下达的运动任务,具体由行走执行模块和动作执行模块负责,其中行走执行模块实现机器人的移动功能,动作执行模块实现机器人脸部表情、头部动作、手部动作控制功能。
智能迎宾机器人上位机控制与底层控制通过传输控制协议(TCP)通信和蓝牙通信连接,机器人底层控制模块间的连接有TCP通信、自动化设备规范协议(ADS)通信、以太网控制自动化技术(EtherCAT)通信、串口通信。
6 上位机控制系统
6.1 远程控制终端
远程控制终端是一个基于C#语言软件窗口框架(WinForm)编程得到的图形用户界面,可以连接工控机控制机器人,通过TCP通信的方式与机器人底层控制部分交换信息。远程控制流程如图11所示,主要功能有远程登录及控制设备连接、机器人行走控制、从文本到语音的发送、机器人头部和手部控制等。
6.2 行走控制功能
完成登录及设备连接后,行走及动作控制部分的界面将会被激活。
行走控制提示界面如图12所示,该界面在控制按钮按下时,会改变界面中代表相应控制功能的图标颜色,起到提示作用。
6.3 动作控制功能
动作控制功能界面如图13所示。用户可以选择各种头部、手部动作,点击运动按钮控制机器人的头部和手部动作。对于使用发光二极管灯的眉毛和嘴部,其控制功能可以通过眉毛和嘴部滑动按钮进行控制。

图11 远程控制流程

图12 行走控制提示界面
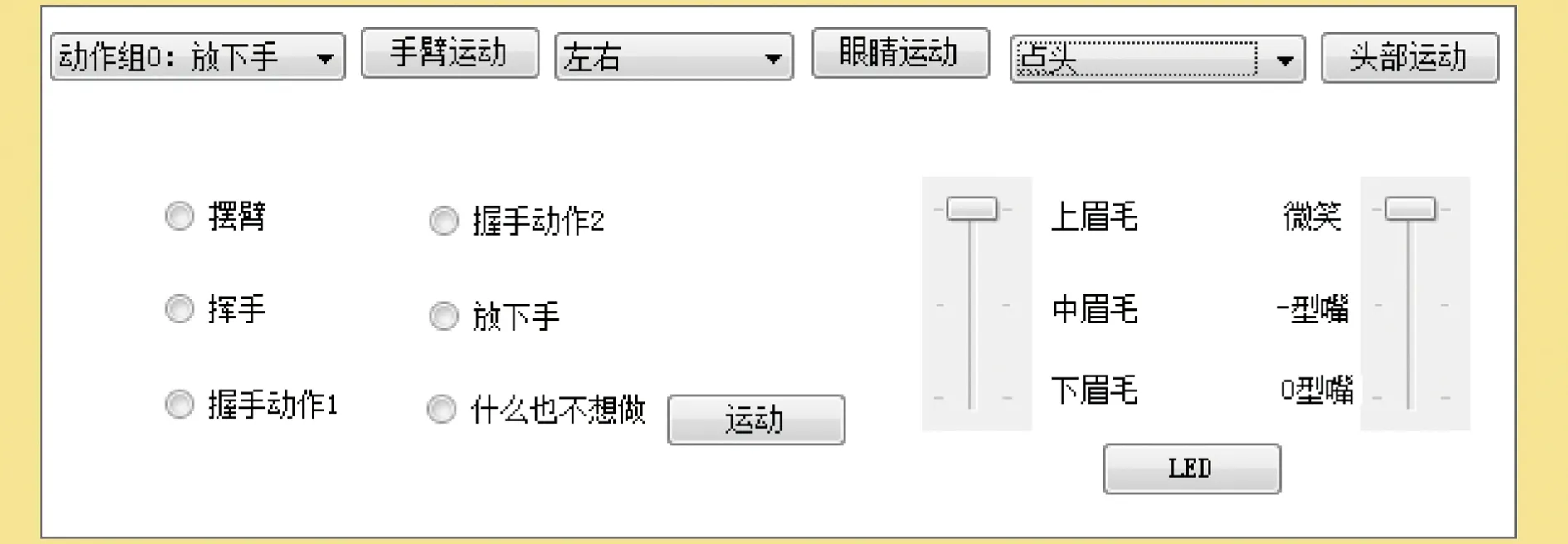
图13 动作控制功能界面
6.4 头部独立控制功能
头部独立控制界面如图14所示,该界面用于头部电机的控制,通过滑动按钮可以改变头部电机的位置。点击独立控制选项可以进入该界面。

图14 头部独立控制界面
7 底层控制系统
7.1 任务调度模块
任务调度模块是智能迎宾机器人控制系统的核心模块之一,负责底层控制模块的调度,以及与上位机控制系统的通信。任务调度模块如图15所示,通过建立一个TCP主控端,与上位机控制系统建立TCP通信。模块内部有一个命令缓冲区和状态缓冲区。命令解释器负责读取命令缓冲区内的命令,并针对命令的类型进行分配,语音命令分配至语音模块,运动命令分配至运动控制模块。监控模块将机器人的状态反馈至任务调度模块的状态检查器,状态检查结果反馈至运动任务规划器和状态缓冲区。

图15 任务调度模块
7.2 运动控制模块
运动控制模块是运动任务的执行模块,如图16所示。运动控制模块接收任务调度模块发送的运动数据,轨迹规划器和动作选择器根据运动数据进行具体规划,再通过插补器将具体电机运动数据传输至下一层。行走执行模块和动作执行模块控制机器人的底盘移动方向,控制方法为比例积分微分控制。
7.3 语音交互模块
语音交互模块受到任务调度模块的调用,负责机器人的语音交互功能,包含智能对话和文字阅读两种模式。语音交互模块如图17所示。

图16 运动控制模块

图17 语音交互模块
在智能对话模式下,语音交互模块采用录音设备录下语音,再将语音转换为文字输入语音库。语音库产生文字形式的回答,随后将该回答由文字转换为语音文件,通过设备播放,从而完成一次对话。
在文字阅读模式下,任务调度模块将上位机控制系统传输来的文字语音信息发送至语音交互模块进行保存,语音交互模块同样将文字输入语音库,并将回答转换为语音进行播放。
7.4 SLAM导航模块
SLAM导航模块通过激光雷达扫描环境,采用SLAM算法进行地图的构建和定位,通过地图导航算法进行路径规划,路径数据输出至任务调度模块[12]。SLAM导航模块如图18所示。

图18 SLAM导航模块
7.5 安全防护模块
安全防护模块是智能迎宾机器人系统的重要组成部分,能够及时检测机器人的不正常运转和危险操作,保护人机安全。安全防护模块如图19所示,激光雷达和超声传感器能够检测机器人与障碍物之间的距离,当距离小于安全阈值时,安全逻辑会作用于任务调度模块,纠正危险操作。电机运转检测用于检测机器人各个部位电机的位置、速度、电流等参数,当电机出现异常时,安全防护模块会及时使机器人停止运转,并进行警报。

图19 安全防护模块
8 结束语
笔者为娃哈哈公司30周年庆典研发了一对智能迎宾机器人,这对智能迎宾机器人应用在庆典现场接待宾客,并在暖场活动中工作效果良好,吸引了大量人气。
笔者介绍了智能迎宾机器人的总体性能、机械结构设计、控制系统架构及核心模块。机器人在庆典现场实现了自主运动和避障,并具有较强的交互性。笔者所做研究为后续开发更加智能的服务机器人提供了技术经验。
猜你喜欢
今日农业(2020年14期)2020-12-14
数字通信世界(2020年3期)2020-04-06
制造技术与机床(2019年4期)2019-04-04
现代防御技术(2016年1期)2016-06-01
少儿科学周刊·少年版(2015年4期)2015-07-07
创业家(2015年3期)2015-02-27
汽车维修与保养(2014年7期)2014-12-15
计算技术与自动化(2014年1期)2014-12-12
体育师友(2011年4期)2011-03-20
娃娃画报(2009年11期)2009-12-07
