抓斗挖泥船潮位自动补偿定深精挖功能开发与应用
2019-06-25 02:25:34李建坤魏永天王超
中国港湾建设 2019年6期
李建坤,魏永天,王超
(中交一航局第三工程有限公司,辽宁 大连 116000)
0 引言
随着我国水工建设的高速发展,迫切需要具备自动化[1]更完善的定深平挖[2-4]抓斗挖泥船,来满足沿海港口深水航道建设与海洋工程的桩基、墩台、码头、海底隧道基础等工程需求,借以实现对基础挖掘的高精度控制,有效提高施工质量和作业效率,节约成本。目前,国内抓斗挖泥船大都从日本等国进口,挖掘超深控制在60 cm范围,均采用手动补偿潮位的人工调节方式来控制挖掘精度。
因此,我国急需提高抓斗挖泥船的功能型设计、开发能力,研制具有自主知识产权控制的高精度抓斗挖泥船,以满足航道疏浚和海洋工程基础建设的需要。
1 绳索疏浚抓斗水下挖掘功能概况
1.1 绳索疏浚抓斗挖掘方式
绳索疏浚抓斗水下作业时主要有沉挖、定深挖和定深平挖3种挖掘方式。
沉挖作业时,支持索保持松弛,仅开闭索收紧,抓斗以其自重扎入到海床中从而抓取大量的泥沙。
定深挖作业时,抓斗下降至指定深度,支持索保持张紧,收紧开闭索合斗,实现抓斗定深挖掘。
定深平挖作业时,开闭索收紧合斗、当合斗至一定角度时,支持索断续下降,保持斗口沿水平移动,实现对泥沙的平整挖掘。
1.2 绳索疏浚抓斗机结构及挖掘方式
绳索疏浚抓斗主要由上承梁、下承梁、撑杆和斗体组成,其驱动系统包括与上承梁相连的支持索,分别位于上承梁、下承梁上的上滑轮组、下滑轮组以及起端位于上承梁缠绕于上下滑轮组之间的开闭索。抓斗作业时,依靠抓斗自重开斗,收紧开闭索合斗,完成挖掘过程。
2 潮汐对挖掘功能的影响
2.1 原因分析
挖泥船海上施工作业时,船舶浮态会随着潮位涨落发生起伏改变,导致挖泥过程中设定的挖掘深度变化,对潮差较大及混合潮型海域挖泥作业影响最大。
经施工现场定期统计,沉挖、定深挖、定深平挖功能随着挖掘精度的逐级提高,对潮位修正精度也逐级增大。
2.2 效率分析
目前,挖泥船均采用人工手动输入潮位差数值进入挖掘控制系统[5-6],通过加减挖掘深度来控制标高,其潮差数值是抓斗机司操人员通过潮位仪显示、人工通报水位等途径获取。手动输入的挖掘控制精度,因输入间隔时间内潮位变化而降低,同时也降低生产效率。
以大连地区为例,年平均潮差2.167 m,最大潮差4.56 m,平均周期12 h 25 min,人工手动调节用时30 s,效能分析见表1。
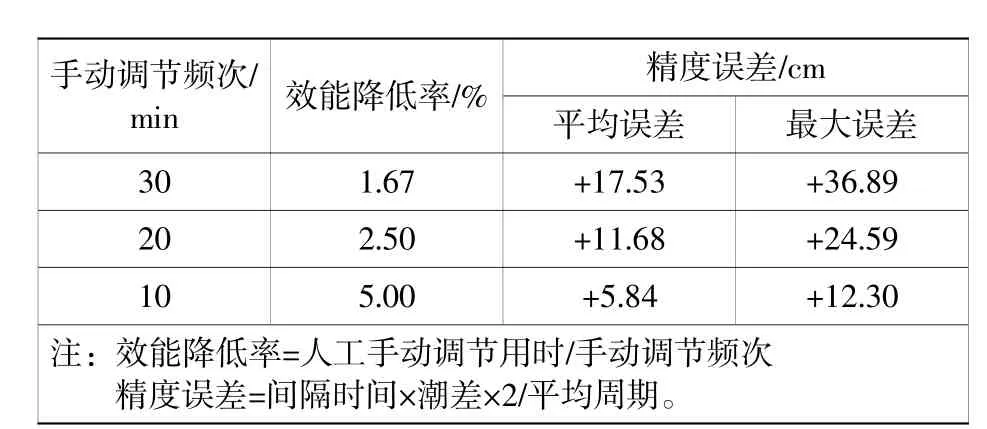
表1 平挖工况效能分析Table 1 Performance analysis of flat dredging working conditions
3 潮位自动补偿方案设计
3.1 方案设计背景
挖泥船挖掘精度控制中,定深平挖工况的精度最高,日本先进的挖泥船精度控制在50 cm。通过对挖泥船综合工况及控制系统分析,提出精挖工况,即在平挖工况基础上,开发对潮位差自动补偿装置系统,实现抓斗恒定在设定标高进行平挖作业,不受潮位涨落影响,消除因此产生的误差,使精度控制在20 cm以内,有效降低生产成本,提高生产效率。
3.2 潮位补偿设计
3.2.1 潮位补偿原理
精挖是在定深平挖功能的基础上,通过采集潮位遥报仪的潮位数值信息,自动获取潮位差数值进入挖掘机中心控制器,补偿潮位对挖掘深度的影响,实时保持作业在设定的挖掘标高,去除了人工校正补偿的作业方式,进一步提高定深平挖精度,实现精挖功能,潮位补偿原理见图1。

图1 潮位补偿原理流程图Fig.1 Flow chart of tidal level compensation principle
3.2.2 潮位传输
潮位仪水位数据,通过压力传感器探头测得水位值,传入主机与标高值进行运算后输出潮位值,数据通过主机端口上的发射机向外发送。潮位遥报接收仪位于抓斗机中心控制器端口,通过解析将其转换成潮位值传输至挖掘控制系统的中心处理器内,构成数据传输链路,使精挖功能实现挖掘全过程模糊化控制。
3.2.3 深度补正装置
深度补正装置通过接受潮位仪接收机解析信号后生成潮位数值,在中心处理器中运算,实时补偿到抓斗下放深度设定值,其通信设计参数按以下内容设定。
同期方式:非同期方式
传输方式:非二重通信
传输速度:9 600 bps
数据:2位文字位16进制,1位文字位为ASCII
3.3 定深平挖原理
挖掘系统设计有平挖控制单元,平挖控制单元由工业控制计算机控制,实时获取开闭索和支持索的实际索长,将检测到的数据和抓斗动作轨迹曲线进行对比,通过中心控制模块和运算器,计算出开闭索和支持索的运行速率,并将控制信号发送给PLC控制器,由PLC的现场总线系统控制卷筒及碟刹,使抓斗运行在预定的轨迹上,实现沉挖、定深挖和平挖控制功能,平挖合斗方式见图2。

图2 平挖合斗示意图Fig.2 Sketch map of horizontal dug dump
在实际定深平挖作业中,为使挖掘后海床面尽可能平坦,需要通过抓斗的提升与开闭联动控制,使抓斗齿尖运动轨迹在合斗期间垂直深度保持不变。平挖控制模式下,需要事先设置挖深以及闭斗过程中钢丝绳的补偿位移。抓斗下降到达预先设定深度后进行闭斗工作,抓斗钢丝绳的数据实时送往控制器与事先存储的理论数值进行比较,计算得出钢丝绳对应的放缆量,及时给碟刹发出工作指令,使抓斗钢丝绳的运动随着抓斗开闭动作实时调节,确保挖掘后泥面接近平整状态,定深平挖工作原理见图3。
4 定深平挖潮位自动补偿应用
定深平挖潮位自动补偿方案设计完成后,通过水、陆两种方式应用验证。
4.1 陆上应用试验
4.1.1 应用方式
在码头前沿选取18 m×10 m试验区域,并回填2 m厚度渣土作为开挖料,顶面标高设定为+5 m(85高程),抓斗挖泥船顶靠码头并对应试验区驻位、执行陆挖试验。采取分层开挖工艺,根据试验前进行单点挖深能力测试,分层厚度取0.5 m。
4.1.2 陆挖平整度分析
1)精挖工况
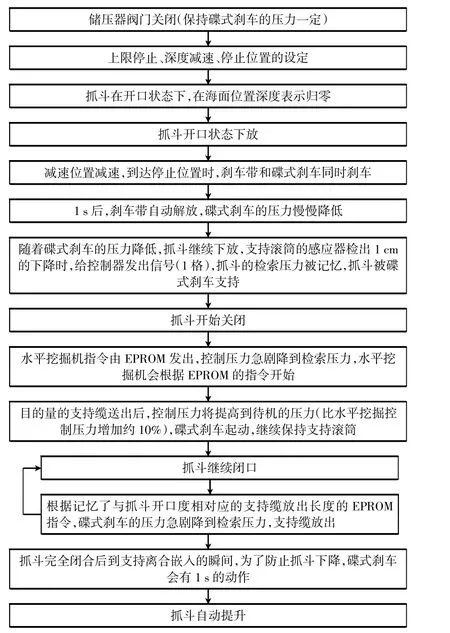
图3 水平挖掘工作原理流程图Fig.3 Flow chart of working principle of horizontal excavation
精挖作业时,开挖后底面类似田间地垄,底面平整,垄台和垄沟高差约20 cm(与斗齿长度相关),垄台之间高差在30 cm以内,垄台与设定标高偏差在±16 cm以内,标高控制较好,数据统计见表2。

表2 陆上精挖工况标高统计表Table 2 Statistical table of elevation of land fine excavation working conditions
2)沉挖工况
抓斗挖泥船不使用精挖工况常规作业时,抓出底面呈中部凸起状,中部与两侧高差达1.00 m,垄台与设定标高偏差在±50 cm以内,标高控制较差。
4.2 水上应用试验
4.2.1 应用方式
选取20 m×20 m水下已炸礁区域作为试验区域,试验前采用多波束进行原始水深测量。根据现场工况按自西向东的施工顺序进行分层作业;抓斗每层开挖厚度设定为0.5 m;开挖标高为-10.5 m、-11.0 m。
4.2.2 水挖平整度分析
精挖作业时,第一层标高设定为-10.5 m,平均标高为-10.69 m,最大标高为-10.84 m,最小标高为-10.55 m,多数偏差可控制在30 cm;第二层标高设定为-11.0 m,平均标高为-11.02 m,最大标高为-11.3 m,最小标高为-10.74 m,多数偏差可控制在30 cm,误差统计见图4。

图4 水上精挖工况误差趋势图Fig.4 Error trend of water fine excavation working conditions
4.3 结论
通过水、陆两种应用实测数据显示,潮位自动补偿定深精挖功能开挖平均偏差可控制在30 cm以内。陆上应用受影响较小,直观反映精挖效果,精度更高;水上应用受地质平整度等不利因素影响,存在偏差波动较大情况,在后续实施过程中,将进一步根据地质条件和设计要求,预留开挖下沉量,进一步提高精度。
5 结语
通过对潮位自动补偿定深精挖功能的开发与应用,进一步提高了抓斗挖泥船自动控制能力,填补了此类装备国内的空白。潮位自动补偿功能减少了因人工手动输入数据时间损耗和行为误差,提高了施工质量和施工效率。
猜你喜欢
湘潮(上半月)(2023年3期)2023-06-14 05:34:58
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07 12:57:26
河北地质(2021年1期)2021-07-21 08:16:12
建材与装饰(2020年6期)2020-03-18 04:42:42
水利水电快报(2019年2期)2019-03-08 09:56:22
水利规划与设计(2017年6期)2017-07-18 10:56:27
工业设计(2016年7期)2016-05-04 04:02:05
设备管理与维修(2016年5期)2016-03-16 02:20:48
船海工程(2015年4期)2016-01-05 15:53:50
采矿技术(2015年2期)2015-11-19 01:49:56